
Motori intelligenti
Uno Smart Motor tiene sotto controllo la posizione angolare, la velocità di rotazione, la accelerazione e la coppia applicata sul perno di uscita.
Le applicazioni si collegano a questi motori attraverso una porta USB e dicono al motore la posizione da raggiungere, la accelerazione, la velocità e la coppia massima. E il motore risponde lo stato attuale di tutti i parametri, principalmente posizione, velocità, coppia, corrente, tensione e temperatura.
Lo Smart Motor è il Sacro Graal della automazione!
Due soli modelli ben studiati potrebbero sostituire il 90% degli azionamenti industriali e civili
(stepper, servo, selectors, solenoids, pumps, lathe and mill machines, 3d printers, laser engravers…)
Gli Smart Motors eliminano alla base tutti i difetti degli altri motori, non perdono passi, sono regolabili, facili da controllare e affidabili, non richiedono elettronica esterna e non ti rompono le dita se li fermi, quindi possono essere “collaborativi”.
Purtroppo i modelli attuali hanno ancora delle mancanze. Ma siamo a un passo dal completarli e presto potranno sostituire ogni altro motore, nelle frese, nelle stampanti, e in ogni altro azionamento della automazione industriale e civile.

Se si considera che i motori classici necessitano di elettronica e software aggiuntivi il prezzo degli Smart Motors FeeTech è già quasi competitivo oggi. Producendone milioni di esemplari potrà scendere ancora e coprire fasce di mercato sempre più ampie.
Il passo successivo sarà di dotarli di un indirizzo IPV6 e farli diventare oggetti indirizzabili univocamente in tutto l’universo (e non stiamo scherzando).
Evoluzione dei motori

Fino a pochi anni fa gli Smart Motors costavano dai 500 euro in su, erano grandi e scomodi e per pilotarli ci voleva una grossa scatola di controllo e complessi cavi di collegamento. Ma attualmente è possibile integrare tutta l’elettronica di controllo direttamente nel motore stesso.



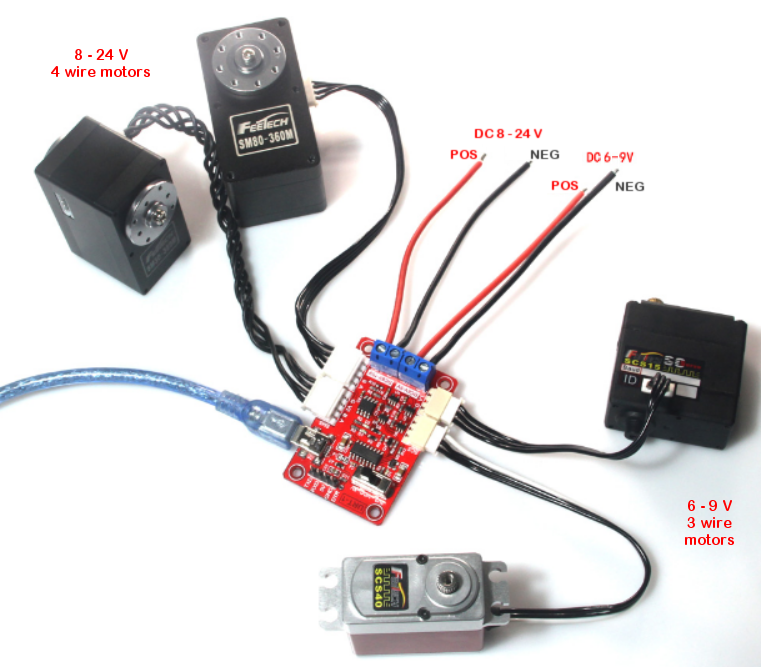
Il FeeTech 3032 è molto piccolo, pesa solo 21 grammi, ha una coppia di 4 kg-cm e costa una ventina di Euro.
Il FeeTech 3215 pesa 55 grammi, ha una coppia di 19 kg-cm e costa poco più di dieci Euro.
Sono in preparazione nuovi modelli Tmot (Theremino Motors) e anche nuovi motori FeeTech e Sentel. Per averli con ottimi prezzi chiedete a Lello che trovate in questa pagina.
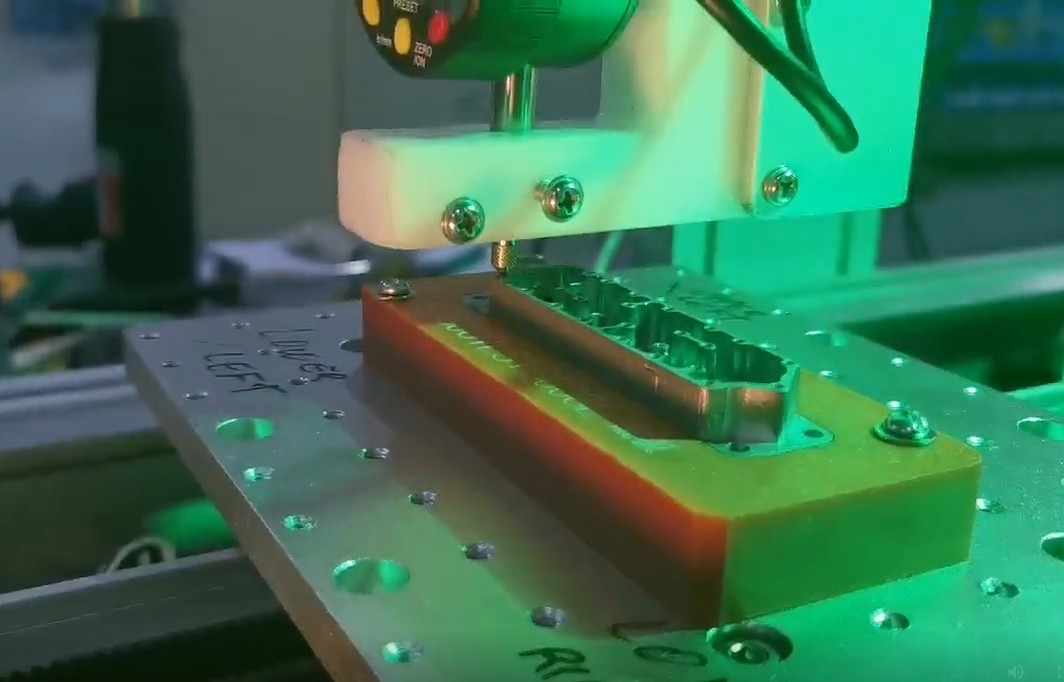
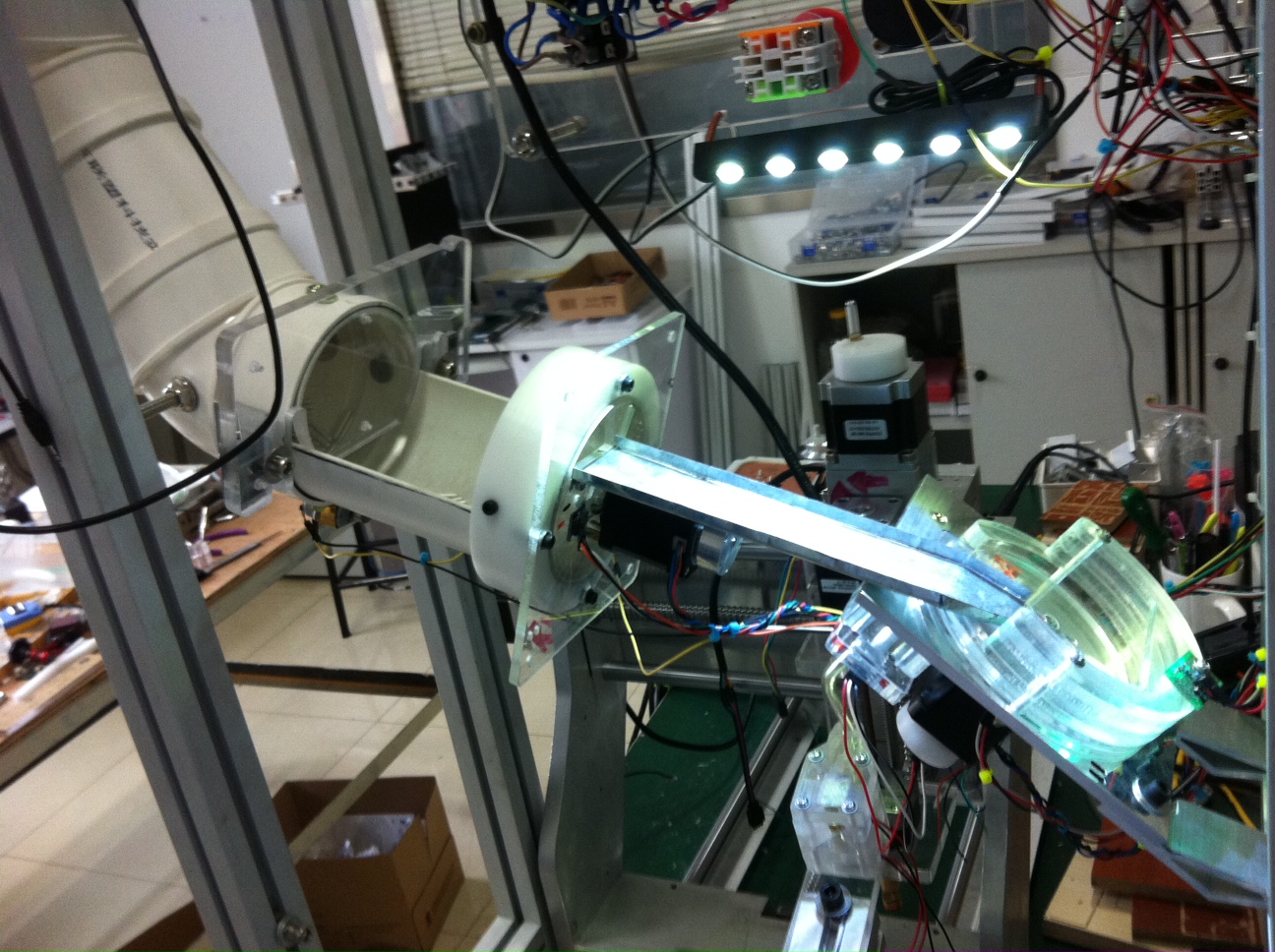
Robot Collaborativi

I primi esperimenti con i bracci robotici risalgono al 2010
Non abbiamo più pubblicato niente da allora perché i risultati ottenibili erano scarsi rispetto alle difficoltà di taratura degli algoritmi 3D di cinematica diretta e inversa.
Oggi (2021), dopo oltre dieci anni di esperimenti, abbiamo trovato soluzioni incredibilmente semplici, che non richiedono difficili impostazioni dei parametri dimensionali e angolari. Basta indicare quanti motori sono collegati e di che tipo e si può immediatamente muoverli e programmarli in modo collaborativo.
Il software Theremino_Cobot non ha bisogno di conoscere nulla su come è composto il robot, non importa se è grosso o piccolo e se i motori sono collegati sopra, sotto o di lato. Un braccio robotico potrebbe essere in configurazione Cartesiana, CoreXY, Articolata, Delta o Scara e si potrà subito iniziare a muoverlo senza configurare il software con queste informazioni.
I video seguenti mostrano quello che si può fare con Theremino_Cobot, Theremino_Motors e poche decine di euro di SmartMotors:
Esperimenti dell’estate del 2021
https://www.theremino.com/files/ThereminoCobotV1.mp4
Ed ecco alcuni esempi recenti (autunno del 2022)
https://www.theremino.com/files/Cobot/CobotExample1.mp4
https://www.theremino.com/files/Cobot/CobotExample2.mp4
https://www.theremino.com/files/Cobot/CobotExample3.mp4
https://www.theremino.com/files/Cobot/CobotExample4.mp4
Una presentazione su questi argomenti del nostro collaboratore Leonardo, che vive a Shenzhen in Cina.
Bejing_Theremino_commercial_robot.pdf
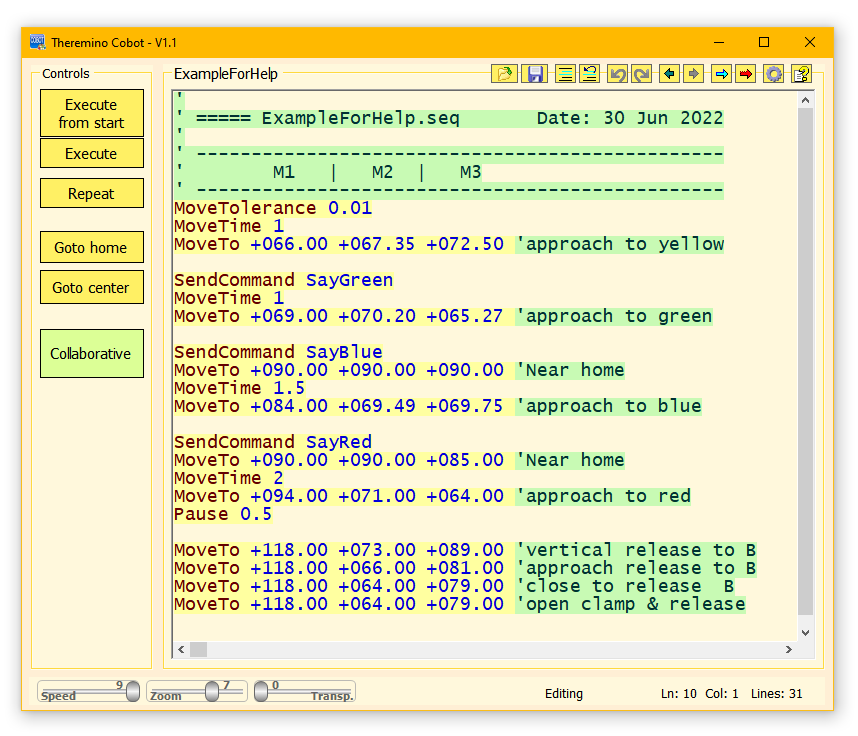
Theremino Cobot

Download della documentazione
(IN COSTRUZIONE – GLI HELP SONO INCOMPLETI)
Documentazione in formato PDF
Theremino_Cobot_Help_ENG.pdf
Theremino_Cobot_Help_ITA.pdf
Theremino_Cobot_Help_CHN.pdf
Theremino_Cobot_Protocols_ENG.pdf
Theremino_Cobot_Protocols_ITA.pdf
Theremino_Cobot_Protocols_CHN.pdf
Theremino_Cobot_Security_ENG.pdf
Theremino_Cobot_Security_ITA.pdf
Theremino_Cobot_Security_CHN.pdf
Documenti originali, in formato OpenOffice, per le revisioni e le traduzioni
Theremino_Cobot_OpenOfficeDocs
Download della applicazione
Download di Theremino Cobot – Versione 1.1
Theremino_Cobot_V1.1
Theremino_Cobot_V1.1_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino Motors
Comunicare con gli Smart Motor FeeTech, Dynamixel e Tmot (Theremino Motors)
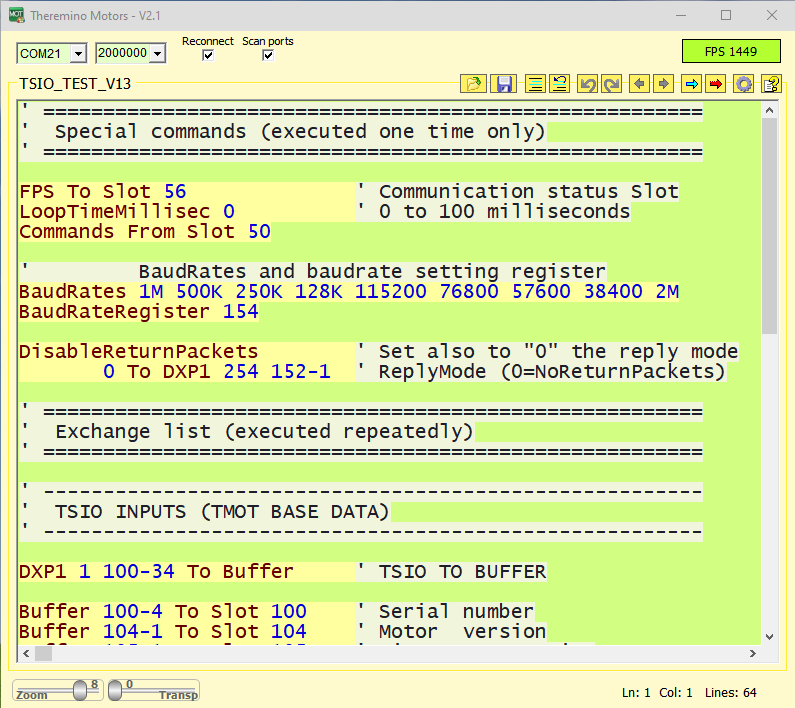
La applicazione Theremino Motors mette in comunicazione gli Slot del nostro sistema con i registri degli Smart Motor.
La comunicazione fisica avviene su linea bilanciata RS485 o su una linea TTL che unisce i segnali TX e RX su un unico filo (One Wire). La comunicazioen One Wire è ottima per i motori dei Cobot, dato che le distanze tra i motori sono al massimo di alcuni metri e che solitamente si utilizza un unico Master che guida tutti i motori e attende le risposte e che quindi non necessita di comunicazioni Full-Duplex.
Questa applicazione utilizza il protocollo Dinamixel V1 (DXP1) che consigliamo per comunicare con gli Smart Motor FeeTech, Dynamixel e Tmot (Theremino Motors). Le sue istruzioni sono efficienti ed è possibile comunicare con molti motori contemporaneamente, mantenendo alti tempi di ripetizione.
Se si usano le giuste istruzioni si riescono a superare le 500 ripetizioni al secondo. E questo significa che ad ogni ripetizione si scrivono e poi rileggono tutti i parametri di tutti i motori. In alcuni casi con la comunicazione One Wire si arriva anche a punte di 1500 ripetizioni al secondo.
La velocità di comunicazione molto alta permette di leggere continuamente tutti i parametri dei motori e quindi di ottenere la massima interattività e movimenti sempre fluidi.
Download della documentazione
Documentazione in formato PDF
Theremino_Motors_Help_ITA.pdf
Theremino_Motors_Help_ENG.pdf
Theremino_Motors_Help_CHN.pdf
Documenti originali, in formato OpenOffice, per le revisioni e le traduzioni
Theremino_Motors_OpenOfficeDocs
Download della applicazione
Download di Theremino Motors – Versione 3.0
Theremino_Motors_V3.0
Theremino_Motors_V3.0_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino ModBus
Utilizzare il vecchio e lento protocollo ModBus per i motori FeeTech e Sentel

La applicazione Theremino ModBus mette in comunicazione gli Slot del nostro sistema con i registri degli Smart Motor.
Questa applicazione utilizza il protocollo ModBus che è meno efficiente del precedente DXP1 e che funziona solo con gli Smart Motor FeeTech e Sentel. Lo forniamo solo per compatibilità con chi è abituato a utilizzare i PLC.
I controllori PLC hardware hanno una frequenza di ripetizione molto bassa (anche meno di 20 comunicazioni al secondo), per cui utilizzare il ModBus non li penalizza molto. Ma dato che nel sistema theremino siamo abituati ad almeno 300…500 ripetizioni al secondo (con punte fino a 1500 in alcuni casi), è preferibile utilizzare il protocollo DXP1 spiegato nel capitolo precedente di questa pagina.
Download della documentazione
Documentazione in formato PDF
Theremino_ModBus_Help_ITA.pdf
Theremino_ModBus_Help_ENG.pdf
Theremino_ModBus_Help_CN.pdf
Documenti originali, in formato OpenOffice, per le revisioni e le traduzioni
Theremino_ModBus_Help_ITA.odt
Theremino_ModBus_Help_ENG.odt
Theremino_ModBus_Help_CN.odt
Download della applicazione
Download di Theremino ModBus – Versione 1.2
Theremino_ModBus_V1.2
Theremino_ModBus_V1.2_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Programmare i motori FeeTech per RS485 o ModBus
Quando li si acquistano i motori FeeTech sono già programmati. Le istruzioni seguenti servono solo nel caso li si volessero riprogrammare o si volesse cambiare il protocollo di comunicazione da RS485 a ModBus o viceversa.
Nel file ZIP “Feetech_Motors_Programming_Kit” troverete i file del firmware e la applicazione per programmarli “FD_1_9_8_1.exe”. E troverete anche un applicazione “FDUpdate.exe” che potrebbe servire in futuro per scaricare versioni più recenti della FD_xxx_.exe.
Leggete la documentazione seguente per conoscere tutti i particolari sulla programmazione del firmware.
Download della documentazione
Documentazione in formato PDF
Feetech_Motors_Programming_ITA.pdf
Feetech_Motors_Programming_ENG.pdf
Feetech_Motors_Programming_CN.pdf
Documenti originali, in formato OpenOffice, per le revisioni e le traduzioni
Feetech_Motors_Programming_ITA.odt
Feetech_Motors_Programming_ENG.odt
Feetech_Motors_Programming_CN.odt
Download del firmware e della applicazione per scriverlo
Download di Feetech Motors Programming Kit – Versione 1.1
Feetech_Motors_Programming_Kit_V1.1
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
To be honest, it is a compact servo mechanism to me. You’ve got a motor, drive, encoder all bundled into one small solution. Do I get it right? Why is smart motor a stand-along category?
Delegating torque control and positioning to the motor itself, allows you to build simple and intrinsically reliable and collaborative systems. Also, the fact that there is no large external controller connected to the motor with complex cables, makes everything different.
It is the same difference between a light controller connected to the network and then connected to wires that then go to a light bulb, and a Smart Lamp that does everything by itself.
A Smart Lamp is a class of its own due to the possibilities it opens up, and Smart Motors are exactly the same.