
与 Theremino 系统的视频的 YouTube 频道



物理开放实验室 – 的 “大科学” 对于制造商

一个梦幻般 “实验室开放日”, 在那里分享技术, 材料, 文档和经验, 创建由一群"制造商"热爱科学,.
介绍了实验物理的经验, 可以用系统 Theremino. 我们做实验看到和摸到现代物理学的主要概念, 作为波-粒二象性, 量化, 放射性和也纠缠的怪现象.
创意和多媒体应用程序

视频链接,以及模块的配置
在这两部影片,你可以看到如何’ 简单连接模块,并对它们进行配置. 在几秒钟, 不中断操作, 它是可能连接新的传感器, 分配新的或不同的功能中出针,让他们互相交流. 可能的配置是无止境和远距离连接也是可能的, 通过串行, 本地网络或互联网. 所有,而无需编写一行代码.
这两部影片显示同样的事情,从两种不同的观点, 第一和第二个硬件软件. 不显示所有可能的行动, 但给 ’ 知道如何使连接模块和如何使用 HAL 程序配置 pin,让他们互相交流之间.


Youtubevideo 硬件连接 Youtubevideo 软件安装程序
视频与传感器和伺服系统
Theremino_Cap_Sensor – CapSensorHQ 传感器的视频 (对于小距离调整)
Theremino_Light_Sensor – 光电池光传感器的视频
Theremino_Magnetic_Sensor – 磁传感器微系统公司快板 A1302
Theremino_Slider_Sensor – 电位器类型 “滑块”
Theremino_Usound_Sensor – SRF05 型超声波测距传感器
Theremino_CapTouch_Sensor – 一个关于电容按钮的视频 (舒适, 快速和无水)
BrushlessMotorControl – 无刷电机控制视频
在这些视频传感器, 指示灯和伺服连接到同一窗体,但可能每个位于不同的模块, 即使远在他乡, 它会很容易使他们工作, 这只会改变他们 “插槽” (在 ThereminoHAL) 或其网络地址 (在 ThereminoOSC)
视频和图像的程序 ThereminoGeiger

单击图像为 YouTube, 还是在这里: Thereminogeiger
在这个视频中我们看到 ThereminoGeiger,, 利用模块化系统 Theremino, 将测量的结果发送到位于后面模拟规模的致动器. 在此示例中的传感器, 软件和模拟规模均紧密但可能也处于不同的位置,通过互联网进行沟通 (无需编写一行代码)
在第一部分中没有放射性样品, 然后您将添加两个玻璃彩球所有 ’ 铀和钍气罩由数据包中包含野营灯. (要了解这些特性测试物质, 看到 l ’ 附录 1 戴尔 ’ 条)
如何使用两个玻璃测试球所有 ’ 铀生产几乎完全 1 我们 / h 和一袋子和’ 充满了钍产生关于数量 10 我们 / h

这是模拟的盖革, 可用于快速测量和那些与老盖革计数器和 CPS 和 CPM 单位更舒适.
– 点击图片放大 !
– –

–
可以模拟工具 “停靠” (钩) 主要程序,也在时间和人为措施服务充当 “定标器” 和如何 “计数率计” 所以你可以精确地测量放射性的水平非常低.
–
伽马能谱测量与 ThereminoMCA
")
Theremino_mca 是一种多通道分析仪准确和易于使用. 版本 3 和 4 他们改进了很多决议和 ’ 扩展到较低的能量.
– – – – –
PRA 和早期版本的 ThereminoMCA 旧视频

在这 Video_YouTube 你看到的 Theremino_MCA,在较少比 30 秒提供非常详细的资料.
来自 NaI 晶体的冲动(TL) 与滨松光电倍增管 R6095 和从一个样本包含少量的铯-137 (要精确,雷神 CK1097 模型-7, 这种管子之间放射性较低)
Theremino 马华也作品,硬件在这里下载: www.theremino.com/downloads/radioactivity
ThereminoArm 机械臂的视频和照片
机械臂由伺服 HXT900 和三个 TGY930, 其中包括在床上,几乎看不见. InOut 模块 “硕士” (然而与 SMD 组件原型之一) 和类型的奴隶 “仆人” 在此示例中,四个试点伺服系统,但能飞达十位. 只要所有的 USB 连接 ’ ThereminoArm 立即开始工作, 无需安装驱动程序, 和从 USB 端口 l 功耗 ’.
机械化施工的 RobotArm
在此文件中你会发现一个小的机械臂的结构细节. (草案提交给比赛 make4cash 这本杂志的 开放源码电子)
Robotarm (机械和电气详细的 PDF 文件)

Theremino_Arm – 写了机械臂的一段视频.
即将到来的视频显示良好的精度在运行一个小设计和特殊的重复性在审查与周围十分之一毫米的错误设计, 即使有高放大率几乎看不见.
RobotArm_RepeatabilityTest1 – 重复性的定位视频.
RobotArm_RepeatabilityTest2 – 第二个视频重复性的定位.
下一段视频显示,力学是足够的刚度以能够磨软的材料,如蜡, SOAP 或轻木木材. 这是只是一个演示, 类似的工作会很好增加结构刚度替换适合在伺服系统中的铜或铝部件的塑料和尼龙的部分.
RobotArmMilling – RobotArm 视频工作与刀具.
下一张图片拿起几个月的 RobotArm 在六个试镜的演变. 图片的制作与测试文件 “Cross.tap” 该软件的附件 “Theremino.arm” 页的 下载.
 从图像开始 1 直到 6, 我们已经一再改变大小的武器, 软件算法和最后的早期的数字伺服 TGY930 TG9e 到决赛模型 (最精确,我们发现). 第六张图片, 近乎完美, 是只可获得大量, 使用凝胶墨水笔, 软化纸叠加多个工作表, 使用生产范围有限的短臂 (16 x 8 厘米) 在最佳区画一下 (用一只手臂伸扩展).
从图像开始 1 直到 6, 我们已经一再改变大小的武器, 软件算法和最后的早期的数字伺服 TGY930 TG9e 到决赛模型 (最精确,我们发现). 第六张图片, 近乎完美, 是只可获得大量, 使用凝胶墨水笔, 软化纸叠加多个工作表, 使用生产范围有限的短臂 (16 x 8 厘米) 在最佳区画一下 (用一只手臂伸扩展).
–
在这个视频中我们看到如何路径的新算法 (快同样的精度几乎十倍)) ThereminoArm 新算法
与步进电机的机械臂
数控机床
数控泡沫切割机:
https://www.youtube.com/watch?v=tjPG4KdE7Mg
https://www.youtube.com/watch?v=ayC2gRUJn8o
https://www.youtube.com/watch?v=_S2smZKZWRI
使用一个手柄轴慢跑:
https://www.youtube.com/watch?v=NCjrHcDag6w
在中国的自动化
三个影带由深圳微波腔体滤波器生产中使用的 Theremino 系统组件, 中国:
视频 1 — — 三个模块 Theremino 大师是心脏的机器.
协助生产滤清器的视频 2 工人.
Video3 — — 工程师和技术人员在系统的开发过程中.
Theremin Synth 的视频和图片
_
_
此应用程序实现由 Leon Theremin 发明的乐器. 第一电子乐器, 所有的合成器之父.
Theremino 合成器 – Flangy Arp
ThereminoSynth LegatoAndPizzicato – 01 – Soundtest
ThereminoSynth LegatoAndPizzicato – 02 – 介绍
ThereminoSynth LegatoAndPizzicato – 03 – 心
ThereminoSynth LegatoAndPizzicato – 04 – 结束
快速成型技术
 点击图片放大 !
–
––
点击图片放大 !
–
––
快速成型和 3D 可视化使我们迅速从想法到去完成的模块.
原型和前系列的图片
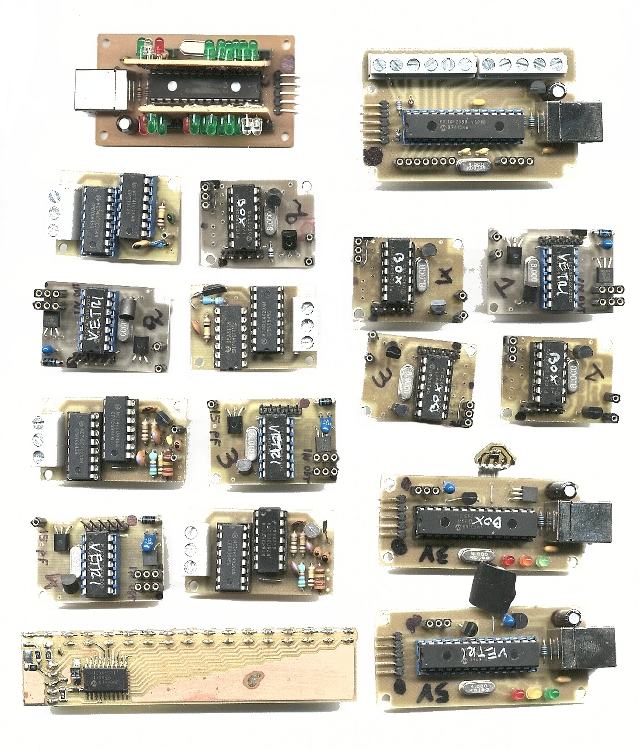

Theremino 系统模块是这些原型的孙子, 在这里有少数人逃过了毁灭. 许多其他被拆卸,一去不复返的废金属容器. 每个原型成本我们无数小时设计和测试,我们想让它们, 你的爱, 在这些图片.
主动电极的心电图和脑电图的原型


即使这些电极花了大量的工作, 屏蔽盒, 与银接触小贴士, 为十字线不导电凝胶, 它是银制的从马可 · 维塔利的: www.vitalibruno.com 我们感谢您的合作.
主动电极工作正常, 但他们现在正在赶超的电极 “非接触式” 这给更好的信号,即使病人的移动, 无需清洗皮肤与酒精, 甚至通过服装. 不接触电极的工作能力,所以不需要银,不要屈服 100% 安全因为病人是电气隔离. 对于未来的发展在这里见到: 博客/生物统计学
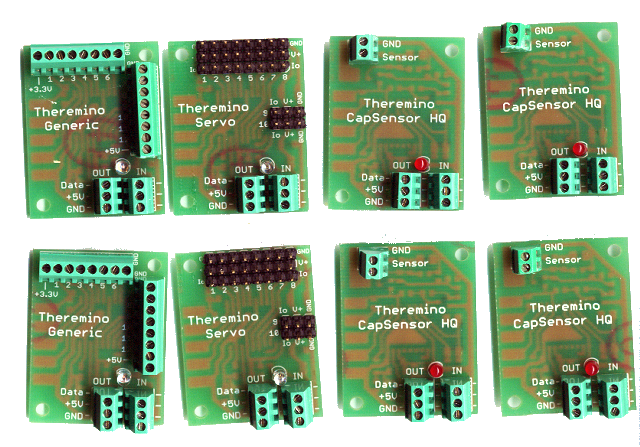
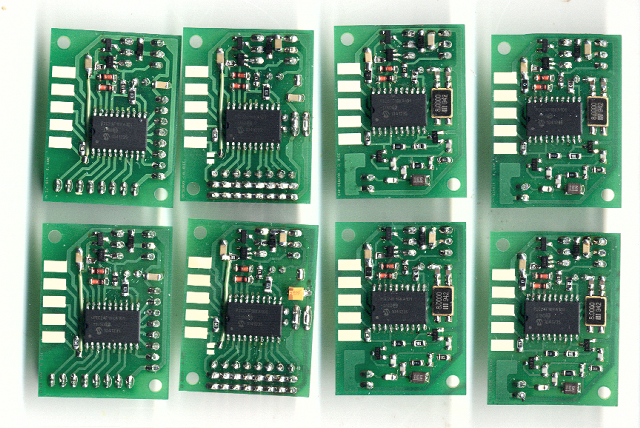
由外部零售商的模块的图像

大师 V3

大师 V3 – 焊锡面

盖革适配器

Pcb 板手动挂载

PmtAdapter

PmtAdapter – 焊锡面

L’ Audioadapter

整个系统的 γ 能谱和 x 射线荧光
