
Motoare pas cu pas (Steppere)

ATENŢIA: Pentru a permite tip Pin Stepper, Stepper_Dir şi Pwm_Fast trebuie să utilizaţi cel puţin versiunea 5.0 Dell ’ HAL, şi formularul de Theremino Master trebuie să fie actualizate cu firmware-ul 3.2 sau mai târziu.
Pentru a afla ce firmware ai doar utilizarea l ultimul HAL ’, conectaţi comandantului şi conta pinii. Firmware-ul original a avut doar şase ace, de la versiunea 3.2 ei 10 şi începând cu versiunea 4 ei 12.
The cel mai recent firmware (4.0) Adauga şase Pin nou Master (trece prin 6 PIN la 12 CODUL PIN). Prin urmare, cu fiecare maestru modulul, Puteţi controla, la trei motoare plus şase generice PIN-ul până la cinci motoare plus doi pini generice. Opţional puteţi adăuga suplimentare de masterat şi de sclavi.
Caracteristici de control al pas cu pas cu firmware Theremino:
- Stil ultra simplu-gestionarea thereminico.
- Software-ul trebuie să trimiteţi numai o dat, destinaţie în milimetri (Notă 1)
- Gama de lucru utile la -10 în +10 Km (kilometri) (cu paşi pentru mm = 200)
- Gestionarea de până la cinci axe masini CNC.
- RepRap tip maşini de conducere până la şase motoare (x, y, z, În funcţie de z fixata şi două extrudere). Te poate scoate apoi două culori.
- în plus 65 KHz frecventa maxima pe toate cinci motoare simultan (Notă 2)
- Variabilitate de puţin 20 Nano secunde (Notă 3)
- Reglabil viteza maximă (la 1 în 18000 mm/min) (Notă 4)
- Acceleraţia maximă reglabil (la 5 în 1000 mm/s/s) (Notă 4)
- Auditul rapoartelor poziţia atins, în milimetri, pentru fiecare axă (Notă 5)
- Posibilitatea de a utiliza independent sau coordonate axe în 2D şi 3D (Notă 6)
- Cu axele de coordonate în 2D sau 3D, Scrie aplicatii control ușor. Nu aveţi nevoie pentru a calcula acceleraţia şi viteza. Puteţi trimite comenzi ţintă simplă, în milimetri. (Notă 7)
- Impulsuri cu automată lățime. L ’ utilizare este simplificată şi nu risca pierderea pas, cauzate de o setare incorectă a acestui parametru. Utilizaţi lentile foto-cuple, Dacă vă limita viteza max (Notă 8)
- Automata de polaritate. L ’ utilizare este simplificată şi să evite pierderea pas, cauzate de setare incorectă a acestui parametru (Notă 9)
(Notă 3) Ca comparaţie: Mach3 are o variabilitate 500 ori mai mare (la 2 în 15 noi în funcţie de PC). Au o variabilitate foarte scăzută, vă permite să lucraţi la viteză maximă, fără a risca pierderea paşi. Calendarul defecte decât Mach3 sunt bine explicate în acest articol.
(Notă 4) Firmware-ul protejeaza motorul de fiecare eroare. Dacă PC-ul nu mai răspunde de ceva timp, firmware-ul încet vine, fără a pierde pasi. Acelaşi lucru se aplică în cazul în care datele este trimis cu calendarul neregulate sau conţin erori.
(Notă 5) Software-ul poate citi distanţa lipsă, fiecare milisecunda, pentru fiecare axă şi cu mare precizie (fracţiune de o miime de milimetru). Nu aveţi nevoie să utilizaţi această informaţie, dar unele aplicaţii pot găsi foarte confortabil. Pot fi utile în scopul diagnosticării, sau pentru algoritmi care trebuie să îndeplinească o toleranță specificat. Cu aceste informaţii software-ul poate lucra cu buclă închisă, şi întotdeauna la viteza maximă. Verificarea continuu distanta de fiecare motor de ţintă, software-ul poate încetini exact atunci când aveţi nevoie de ea, fără a face calcule complexe de viteză, traiectoriile şi acceleraţiile.
(Notă 6) În versiunea 5.0 coordonarea axa HAL nu este completă. Importante aplicatii să aibă grijă de ei înşişi, Prin urmare, ne concentrăm pe aplicarea CNC Theremino, şi numai după ce am terminat de coordonarea axe.
(Notă 7) Destinaţii intermediare sunt reiniţializate, până la 500-1000 ori pe secundă. Cel mai bun traseu, este recalculat în mod continuu. L ’ de control algoritm ia în considerare, poziția reală la fiecare accelerare motor şi maxim care poate rezista la. Deşi cererea CNC calculează greşit calea, în orice caz evita a pierde pasi.
(Notă 8) De obicei, trebuie să specificaţi lăţimea de impulsuri (cu Mach3 din 1 în 15 ne). Acesta este un prost înţeles şi mulţi utilizatori se reglementa aleatoriu. Utilizarea largă impulsuri permite plasarea dispozitivelor electronice lentile, ca un Foto-cuple (de exemplu 4N25 ieftine, 4N26 şi 4N27). Dar umflat impulsuri limita maximă utilizabilă. Theremino regulă acest timp 50 ne (permiţându-vă să utilizaţi lent electronice pentru maşinile mai lent), dar reduce automat dacă utilizaţi viteze mari şi valori mari de microstep. La un minim de 7.7 ne, Atunci când se utilizează frecvența maximă (65.535 KHz).
(Notă 9) Cu alte generatoare de puls (precum Mach3) trebuie să specificaţi polaritatea puls. Pentru a seta trebuie să ştiţi dacă driverul acţionează pe marginea în ascensiune sau coborâre. Această informaţie nu este întotdeauna disponibilă şi dacă tu a lua it greşit se întâmplă puteţi pas sporadic pierderea, foarte greu de la faţa locului. Teoretic folosind greşit faţă nu ar trebui să cauzeze probleme, deoarece la fiecare margine în creştere, urmează în mod necesar o margine care se încadrează. dar, Dacă un semn de direcţie este actualizat la momentul nepotrivit, pot pierde pasi, sau de a lua măsuri suplimentare. Firmware-ul de Theremino Master controlează direcţia semn cu grijă. Semnalul poate fi folosit pentru şofer drivere (o minoritate) acționând pe marginea care se încadrează. Eliminarea această ajustare, utilizarea este mai uşor şi elimină riscul de a pierde pasi.
Setaţi tipul de Pin pas cu pas în aplicarea HAL
Fiecare motor pas cu pas are nevoie de două Pin fizice, un pas şi unul pentru managementul. Microcontroller-ar loc PIN-ul la placere, dar ne-am decis să limiteze confuzie, prin specificarea posturi presetate, pentru Pin-tip pas cu pas şi Stepper_Dir.
Tipul Pin Stepper citirea de la o valoare, care este pur şi simplu destinaţie în mm. Simple cereri, Puteţi specifica o destinaţie mai departe, şi să-l facă toate firmware-ul. Cele mai solicitante aplicaţii, Puteţi calcula propria lor calea şi trimite frecvente destinaţii intermediare. Cu aceasta tehnica, o aplicatie poate verifica viteza de lucru (hrana pentru animale), şi stabili exact calea, chiar şi în mai multe dimensiuni. Pentru a obţine doar mişcare lină 20 destinaţii pe secundă (până la 50 pentru cele mai solicitante aplicaţii).
Inversa unei axe:
Pentru a inversa direcţia de mişcare a unei axe, ei swap valorile “1000” şi “0”, de cutii “1000 înseamnă mm” şi “0 înseamnă mm”.
Parametri specifici de tip Pin Stepper:
Viteza Max – Aceasta este cea mai rapidă viteză, în milimetri pe minut. Firmware-ul continuu verifică destinaţii trimis de software. Dacă software-ul este cere prea mult pentru motor, firmware-ul limitează viteza lui, pentru a evita pierderea paşi. Ridica această valoare, până când veţi vedea că motorul va pierde pasi (Face un zgomot de înaltă ţinută morală şi staţii de) şi apoi scade de o 20..50%, pentru a reveni la o zonă sigură. Se repetă încercările sub sarcină, sau de frânare a motorului, manual, deci asiguraţi-vă că aveţi unele cameră.
Max Acc – Acesta este acceleraţia maximă (şi decelerare), în milimetri pe minut. Firmware-ul continuu verifică destinaţii trimis de software. Dacă software-ul este cere prea mult pentru motor, firmware-ul restricţionează acesteia accelerare, pentru a evita pierderea paşi. Ridica această valoare, până când veţi vedea că motorul va pierde paşi în timpul schimbării de direcţie (Face un zgomot de înaltă ţinută morală şi staţii de) şi apoi scade de o 20..50%, pentru a reveni la o zonă sigură. Se repetă încercările sub sarcină, sau de frânare a motorului, manual, deci asiguraţi-vă că aveţi unele cameră.
Paşi pentru mm – Aici aveţi pentru a seta pas, motorul este într-un spin, înmulţită cu microstep, Situat în controlerul, şi împărţit în milimetri, produs de o rotaţie de motor. Dacă fiecare rotire, produce un milimetru de circulaţie, motorul este un 200 la revoluţie, şi nu folosesc microstep, apoi setaţi valoarea: 200 (paşi la revoluţie) x 1 (microstep) / 1 (mm / revoluţie) = 200. În cazul în care folosind şaisprezece microstep atunci când stabiliţi valoarea: 200 (paşi la revoluţie) x 16 (microstep) / 1 (mm / revoluţie) = 3200.
Legat de anterioare – Activând această casetă de selectare, motorul este conectat cu cea anterioară, şi, prin urmare, face parte dintr-un, rulează 2D tweens, 3D, 4D sau 5 d. Fără acest interpolare, motorul trebuie să facă mai puţin rutiere, ajunge mai devreme şi apoi calea, ar o linie sparte, compus din două sau mai multe segmente. Activarea l ’ interpolare, viteza de toate motoarele este coordonată, astfel încât traiectoria reală, este o linie dreaptă. Profitând de această coordonare, software-ul de control poate, în unele cazuri, simplifica considerabil (în versiunea curentă de HAL axa coordonare nu este implementat, linia de sosire în versiuni viitoare)
Feb actualizare 2015: Poate că această opţiune nu este la fel de important, ca m-am gândit toate ’ începe. Vom probabil ajunge înainte de alte mai multe proiecte de presare. Eventual, scrie-ne, Dacă aveţi nevoie urgent.
Tipul de Pin Stepper_Dir au parametri pentru a regla. Eu sunt doar un substituent pentru fizice Pin de ieşire, stabilirea direcţia de motor. Nu este necesar să utilizaţi valoarea, că aceste coduri PIN scris în Slot, dar unele aplicaţii pot găsi că este util. Valoarea pe care este scris în slot, este distanţa de la destinaţie, în milimetri (şi până la fracţiuni de o miime de milimetru). Aceste informaţii pot fi utilizate în scopul diagnosticării, sau pentru algoritmi care trebuie să îndeplinească o toleranță specificat. Cu aceste informaţii software-ul poate lucra cu buclă închisă, şi întotdeauna la viteza maximă. Verificarea continuu distanta de fiecare motor de ţintă, software-ul poate încetini exact atunci când aveţi nevoie de ea, fără a face calcule complexe de viteză, traiectoriile şi acceleraţiile.
Vezi detalii de Pin

PIN-ul detalii Arată accelerare şi viteza de top în Hz (paşi pe secundă). Aceste valori sunt utile pentru proiectare l ’ electronice, În timpul încercării și pentru a determina cât de multe micro-pas utilizarea. În unele cazuri, Acesta poate fi util să ştiţi ţintă dur (în paşi), în loc de destinaţie în mm.
În aplicarea HAL, Dublu pocnitură pe linie de Pin (Pas cu pas de tip). În fereastra, în partea de jos, Citiţi detaliile de PIN-ul selectat. Click pe imagine pentru o vizualizare mai mare.
Video care arată precizia de impulsuri produse de Master modulul, decât Mach3


Clipurile video de pe YouTube:
http://www.youtube.com/embed/CeC5WD4866o?fs=1&rel=0&loop=1&hd=1&autoplay=1
În acest film vom vedea bandare în timp, perioada între un impuls şi ulterioare. Scara a două videoclipuri este acelaşi, 100 NS pentru piaţa. Maestrul Theremino produce impulsuri, cu un bilet de numai 20 Nano secunde. În schimb continuu depăşeşte Mach3 2 micro-secunde şi în cele mai rele momente vin la 10 micro secunde. Dacă sunteţi călătoresc în 25 KHz, bandare de Theremino Master este doar 0.05%, În timp ce Mach3 este egal cu 25%. Când depăşeşti 10% motoare pas cu pas au început să sufere şi pot pierde pasi. În maşinile mai lent variabilitate Mach3 este inofensiv şi utilizarea micro-paşi îmbunătăţeşte situaţia. În toate cazurile, cu toate acestea,, în prezenţa de variabilitate, Tu trebuie să scadă viteza maximă. Pentru mai multe informaţii, calendarul defecte decât Mach3 (şi chiar mai rău pe defecte ale LinuxCNC – EMC2), Citeste Acest articol şi mai ales aspectul l’imagine în partea de jos a acestei pagini.
Raportor pentru motoare pas cu pas
 Descarca imaginea cu butonul drept al mausului.
Descarca imaginea cu butonul drept al mausului.
Acest raportor de 200 paşi (1.8 fiecare pas de grade), Este util pentru a controla funcţionarea, motoare pas cu pas. Am căutat mult timp pe Web, şi în cele din urmă am avut să ne. Dimensiuni de imprimare curent (75 x 75 mm) sunt motoare Nema 23. Cu un program pentru desen, sau cu setări imprimantă, Puteţi ajusta dimensiunea, la motoare mai mici, sau mai mare. Protractor pot fi imprimate, cu o imprimantă cu jet de cerneală, pe carton.
Spre hack goniometer Theremino CNC

Ne-am transformat l ’ imagine raportor în GCode (cu “Theremino ImgToGcode“). GCode este printre “Exemple de gravura”, Theremino CNC, şi aceasta se numeşte “StepperMotor Protractor gc”.
Ca bază recomandăm plexiglas, sau colorate de plastic.
Pentru a obţine expunere maximă, Lipici-o foaie de plastic subtire, pe o foaie de grosime, culoare diferită şi afectează numai foaia de sus.
Recomandări pentru motoare pas cu pas
Ca un principiu de bază că motoarele trebuie să fie evitate “sgranino” (auzi un “Natasha” şi a plantelor de motor). Dacă un motor de scoici piesa devine corupt. ’ Nici o modalitate de a reveni şi arunca bucata. În afară de a pierde ore de maşină timp pierzi semis.
Să vă asiguraţi că nu pierdeţi paşi continua aşa: creşte fiecare ajustare, unul la un moment dat, până la scoici motor şi apoi du-te înapoi una 30%, sau chiar 50% pentru a fi pe partea în condiţii de siguranţă. Regulamentele sunt: viteza maximă şi accelerare (Nell ’ HAL). Pentru performanţe optime, de asemenea, tu ar trebui să ajusteze curent la motor (un tuns pe conducătorul auto modulul). Tuns mici ar trebui să fie împuşcat cu o şurubelniţă adecvată şi foarte atent. Dacă surubelnita scapă şi face un scurt-circuit, driverul prăji toate ’ instantanee (şi, uneori, pauze în).
Dacă driverul permite acest lucru este întotdeauna bun pentru a seta cel puţin la micro-paşii 4. Dacă nu utilizaţi micro-pas motor produce vibraţii puternice. Mecanice rezonante, declansata de vibraţii, poate duce la pierderea etape, chiar şi la viteze foarte mici. Pentru a evita acest lucru ar trebui să măriţi curent la motor, dar acest lucru ar limita viteza maximă.
Limita mecanice frecare şi adăugaţi cuplaje flexibile pentru a preveni motorul la eforturile datorită inevitabile mici erori de afara axelor. În plus cuplaje sunt decuplarea motorului de rezonante de piese mecanice de maşină. În cazul în care mecanicii sunt bine făcute şi motor se execută gratuit, curent poate fi redusă şi este întotdeauna un plus.
Minimizarea curent pe motor este important. Tu nu ar trebui să setaţi Max curent! Curent specificate de fabricant nu este puterea pe care va trebui să utilizaţi. Dar acest lucru este curentul maxim, dincolo de care a motorului de căldură până atât de mult să strice. Reducerea curente de lucru, minimizarea vibraţii şi de a creşte viteza maximă. Cele mai bune operare curent, Este, de obicei, aproximativ un sfert din care indicat pe motor.
În prezenţa puternică frecare suntem obligaţi să crească curent. Dar această creștere are un efect benefic, doar la viteze mici. La viteze mari nu te îmbunătăţiri. Într-adevăr, pericolul de a pierde distanţa creşte şi vă sunt forţaţi să limiteze viteza maximă.
Drivere pentru Steppere
Steppere nu poate fi folosită direct ca si tine cu Servo. Trebuie să adăugaţi un driver. Vă recomandăm să eviţi driverele vechi de design care conțin SA1042 integrate, SA1027, Uln2003, L297 si similare. Cele mai bune drivere conţin cipuri A4988 produs de pe Allegro.
Tensiune maximă de A4988 este 35 Volţi (Deci, este recomandat să feed-le să 24 Volţi) şi curentul maxim este 2 Amper (dar în acest caz este nevoie de un radiator si un ventilator care suflă aer la ’ mare pe toţi şoferii)
 Driverele nu sunt reglate la curent maxim suportabila de motor!!! Curentul indicat pe motor este cel mai, dincolo de care ar putea deteriora motoarele!
Driverele nu sunt reglate la curent maxim suportabila de motor!!! Curentul indicat pe motor este cel mai, dincolo de care ar putea deteriora motoarele!
În cazul în care motoarele sunt de 1 Apoi curent este dreptul de amperi 250 dar şi 500 dar. Deci motorul nu se încălzeşte, driverele pic de căldură şi viteza maximă creşte.
Reducerea curentului este redus un pic’ cuplu, dar motoarele rula fine şi permite o viteză maximă mai mare, înainte de boabe.
Pentru a regla trimmere de curent, Utilizaţi întotdeauna o şurubelniţă din plastic, altfel poate arde driverele sau să înceapă fuse CncShield fila.
Drivere pentru controlul motor cu pas

A4988 (imaginea stânga), sunt perfect compatibile cu DRV8825 (imaginea din dreapta), Dar trebuie să fii atent că trebuie montate unul în sens invers față de celălalt (a se vedea următoarele imagini).
Se recomandă ca, ambele 4988 care 8825, cu tensiune 12 sau 24 Volţi şi nu mai mult. Cu 24 Viteza maximă de volti este uşor mai mare. The 36 Volt este mai bine să nu le folosească, pentru că 4988 nu ţineţi-le chiar şi 8825 ar locul de muncă prea aproape de limita.
Tu nu trebuie să utilizaţi-le la curent mai mare 1 Amper. Maxim 2 Amper, dar cu fiecare dissipators pe şofer şi un singur ventilator care raceste-le toate de la ’ de sus.
Deşi în aceste imagini apar fără radiator A4988, aproape toţi vânzătorii le oferi cu radiator.
Cum ar fi o usa-driver pentru a utiliza?
Sunt evita cu siguranta cnc-controller cu drivere sudate pe o farfurie. Primul defect trebuie sa arunci l complet ’ controler. Deci ai petrece mult, Veţi deşeuri şi polueaza, chiar merge împotriva principiilor noastre pentru a limita deşeurilor.
Şoferii pot sparge cu uşurinţă (doar un moment rău contact pe un motor) şi tu nu poate înlocui chips-uri pe placa, Apoi te arunca driver de controler întreg l & #8217;, ai pierdut sute de dolari şi opri masina ia o lungă perioadă de timp. De asemenea, nu este posibil să sudură drivere noi pe o farfurie, Deci, dacă vom începe, De exemplu,, cu trei drivere, Puteţi adăuga un al patrulea şi o a cincea. Acest lucru va duce la producerea controler cu patru sau cinci drivere, chiar dacă se află al patrulea şi al cincilea nu a folosit niciodată, se întoarce împotriva principiilor noastre pentru a limita deşeurilor.
O soluţie bună este de a utiliza drivere cu conectorii, Deci pot înlocui sau adăuga cu uşurinţă.

Drivere de înlocuire rediculously (despre 3 Euro) şi înlocuiţi în treizeci de secunde. Dacă vă cumpăraţi o rezervă şi le-au asigurat că maşina nu va opri.
Nu fi păcălit de agenţi de vânzări, care nu publica schema şi “Să cred că” că driverele lor sunt mai bine. Când te duci pentru a verifica chips-uri sunt la fel ca aceste drivere, Este întotdeauna mare A4988 (sau echivalent) produse de la Allegro.
Şi aveţi, de asemenea Atentie la controler lipite direct pe placa de circuit imprimat principal, Nici un ventilator şi radiator-mai puţin chip. Chips-uri va incalzi mult, crescând probabilitatea de eroare şi pierde l ’ întregul controler.
Consiliul de conducător auto – O bază de sprijin pentru drivere
Nu cumpara scump cnc-controller cu chip direct sudate la bord! Conducătorii auto trebuie să fie înlocuibile, ca în Driver placa de aceste imagini.
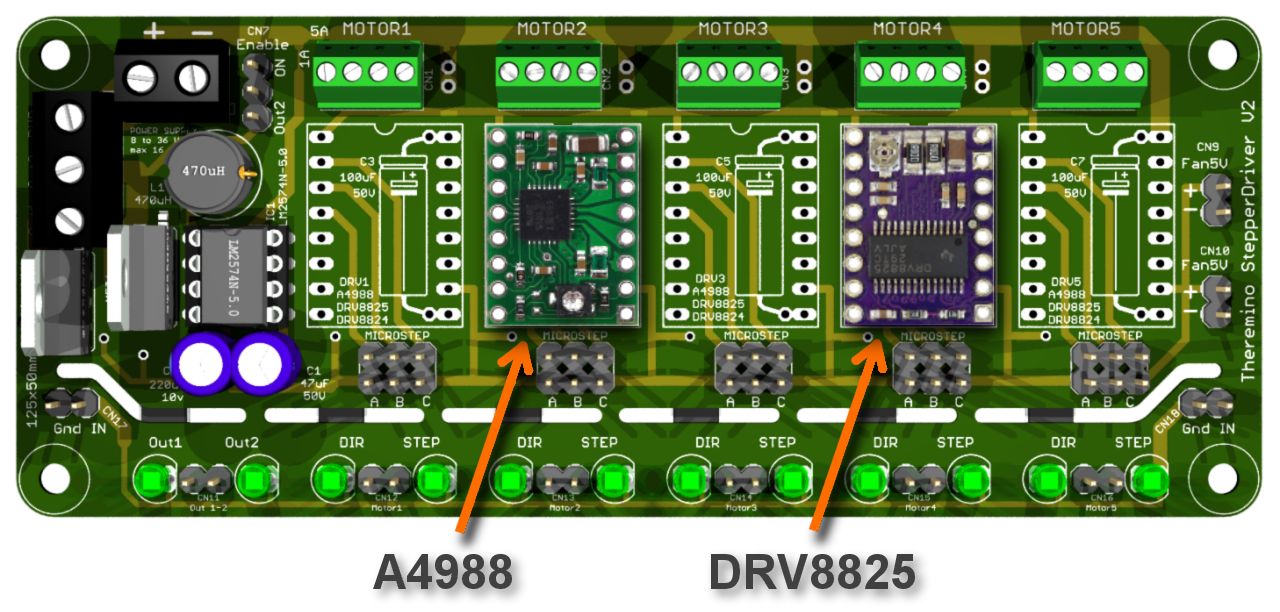
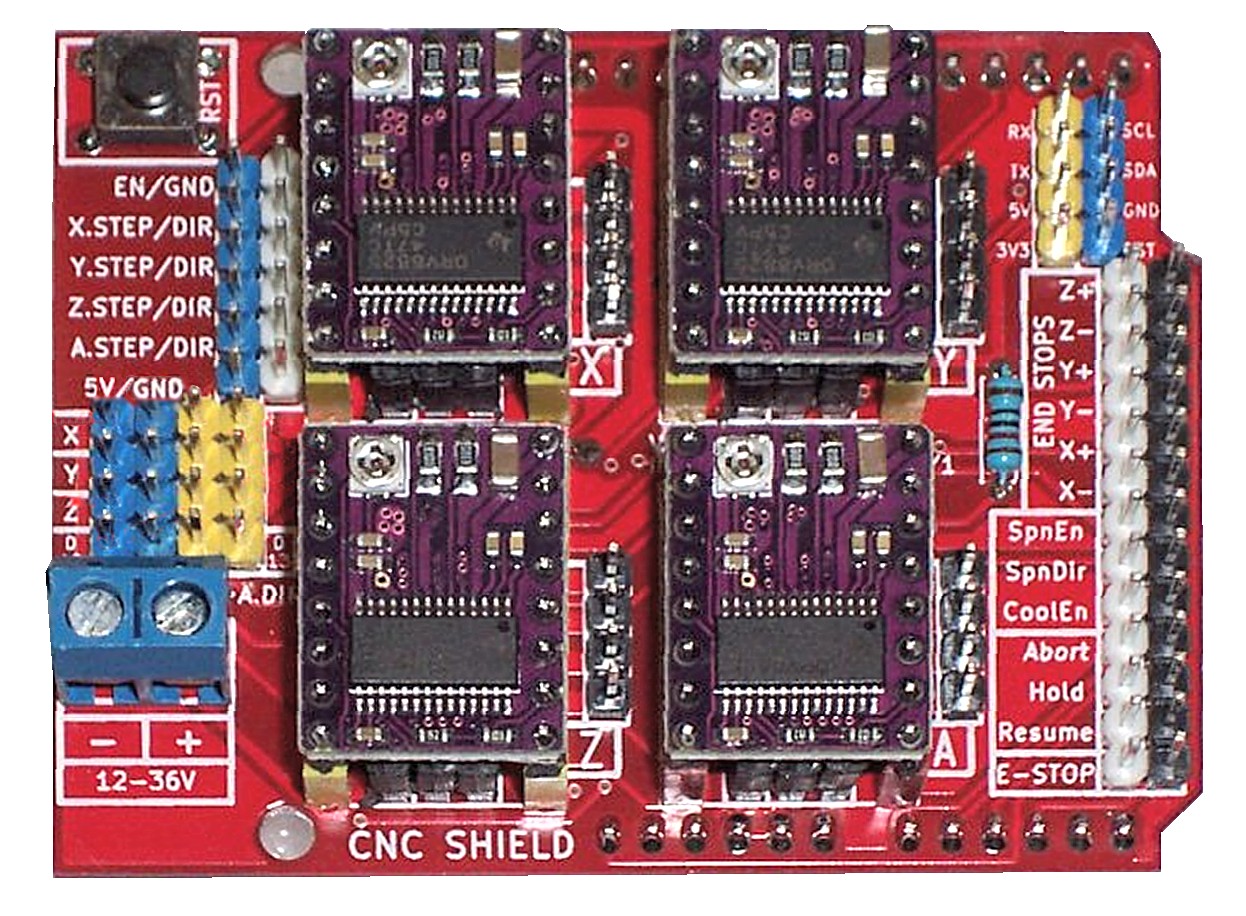
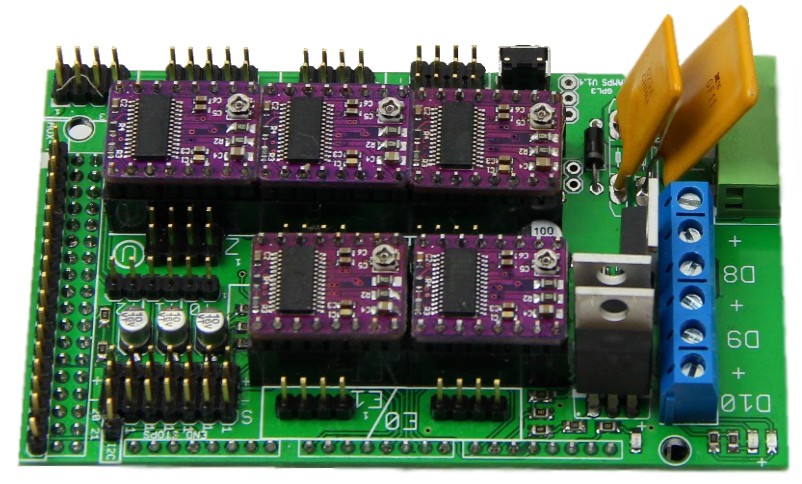
În imaginea de mai sus veţi vedea placa Theremino_StepperDriver (informaţii pe aceasta pagina), În timp ce în cele două imagini de mai jos puteţi vedea “Rampe” Şi “CncShieldV3”. Costul acestuia, mai puţin, Dar eu nu sunt optocoupled, Deci ele pot genera probleme electrice de zgomot.



Recomandăm să păstraţi modularitate maximă, pentru a permite modificări viitoare, îmbunătăţiri şi înlocuiri. Sau cu Breadboard și perciunilor Dupont duce, sau cu plăcuţă adaptor Theremino_StepperDriver, sau cu Rampe, sau cu o CncShieldV3 (ultimele două pot fi găsite pe eBay).




Plăci ca rampe şi CncShieldV3, nu sunt construite special pentru sistemaTheremino, pentru a face conexiuni se referă la wiring diagrame. Dacă aveţi îndoieli vă rugăm să ne e-mail.
Posizionare am driver sulla CncShieldV3 e sulla rampe
Aceste imagini sunt doar valabile pentru drivere DRV8825, sigur că A4988 trebuie să fie introdus cu trimmer peste. Pentru alte drivere verifica site-ul producatorului pe.
Un exemplu de cablare
ATENŢIA: Pentru a activa motoare ENABLE semnal trebuie să fie conectat la GND. Deci mereu pus un jumper “RO / GND”. Dacă uitaţi să faceţi acest lucru motoarele de căutare nu se mişcă.


În această imagine puteţi vedea un exemplu de cabluri între Master şi CncShieldV3.
În acest de cabluri sunt legate de nouă pinilor maestru drivere patru şi cinci InOut “de serviciu”. InOut poate servi pentru a controla aprinderea motorului ax şi a citi comutatorul de jos. Doesnít, încă disponibile InOut trei mai multe, coordonator.
Firele de semnal poate fi deconectat şi s-a mutat în orice moment, chiar şi cu totul activat, dar din moment ce c ’ este o mare, rău de alimentare conectat la 220 Volţi, trebuie să fii foarte atent ca sârmă de teren, între CncShield şi Master, sunt pantaloni scurţi, puternic si mereu conectat.
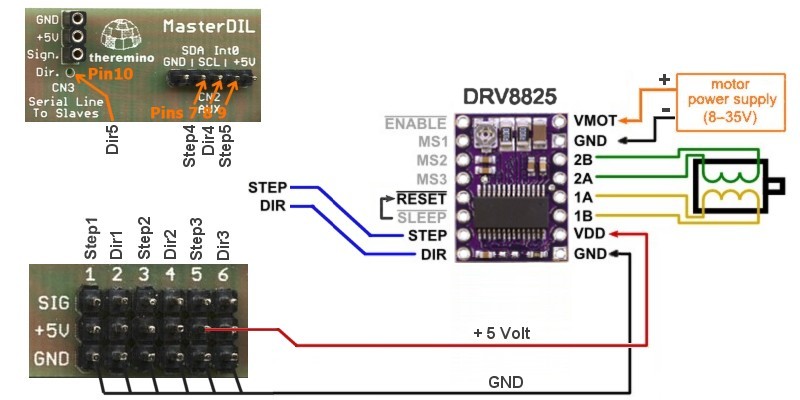
Conexiunile între Master şi drivere Theremino
Aici vom explica cum să se conecteze direct Master drivere, fără a utiliza un Driver de bord.
Drivere A4988

Drivere DRV8825
Setările de microstep
| C (M0) (Ms1) |
B (M1) (MS2) |
În (M2) (Ms3) |
Setările de Microstep Drv8825 |
Setările de Microstep A4988 |
| Low | Low | Low | Complet pas | Complet pas |
| Mare | Low | Low | Jumătate de pas | Jumătate de pas |
| Low | Mare | Low | 1/4 pas | 1/4 pas |
| Mare | Mare | Low | 1/8 pas | 1/8 pas |
| Low | Low | Mare | 1/16 pas | – |
| Mare | Low | Mare | 1/32 pas | – |
| Low | Mare | Mare | 1/32 pas | – |
| Mare | Mare | Mare | 1/32 pas | 1/16 pas |
Scăzut înseamnă: “Conectat la GND” adică “Unjumpered”
Alto mijloace: “Conectat la pozitiv” adică “Cu pod”
CncShield file şi poduri rampe duce la semnale pozitive, Deci cu toate trei jumperi eliminat te “Complet pas”. Utilizaţi întotdeauna 8, 16 sau 32 microstep, apoi introduceţi primele două poduri sau ultimul, sau chiar toate cele trei. Şi amintiţi-vă să se înmulţească, Nell ’ HAL, valoarea “Paşi pentru mm” pentru numărul de micro-paşi set.
ATENŢIA: Unele cartele (Rampe 1.4 Unii producători), au jumperi microstep selecţia nu de lucru. Unele geniu rău a modificat PCB pentru a seta-le la fix 16 microstep (ce servesc atât în imprimante 3D). Doar verifica cu un tester de selecţie jumper ace, În cazul în care perechile de ace sunt scurtcircuit, apoi este una dintre aceste carduri. În acest caz prin eliminarea poduri din plastic, cu răbdare şi cu Dremel, Se poate corecta PCB.
Ajustaţi tuns la limitarea de curent
Modulul A4988, produs la Pololu, Lama de tuns este la 10 KOhm şi este conectat la 5 Volţi cu un rezistor de 20 KOhm. Prin care tensiunea de referinţă, cu trimmer la maxim, este de 1.6 Volţi. Această referinţă este împărţit la opt intern pe chip şi apoi comparate cu rezistenţe 0.05 ohmi. Apoi tu a lua un curent egal cu de două ori şi jumătate de tensiune de referinţă.
Formular DRV8825, produs de Pololu, Lama de tuns este la 10 KOhm şi este conectat la 3.3 Stabilizat de volţi. Prin care tensiunea de referinţă, cu trimmer la maxim, este de 3.3 Volţi. Această referinţă este împărţit de cinci în interiorul chip şi apoi comparate cu rezistenţe 0.1 ohmi. Apoi tu a lua un curent egal cu de două ori tensiunea de referinţă.
Tensiunea de referinţă se măsoară cu un tester cu negativ la GND şi pozitiv pe centrul de tuns.
Acestea sunt reglementările care sunt obţinute:
| Poziţia de Trimmere | A4988 | Drv8825 |
| La cele mai | 4.0 Amper | 6.6 Amper |
| Trei sferturi | 3.0 Amper | 4.9 Amper |
| Două treimi | 2.7 Amper | 4.4 Amper |
| În mijlocul | 2.0 Amper | 3.3 Amper |
| În a treia | 1.3 Amper | 2.2 Amper |
| Într-un trimestru | 1.0 Amper | 1.6 Amper |
| Zero | 0 Amper | 0 Amper |
ATENŢIA: După cum puteţi vedea, care a proiectat aceste forme a ratat complet scala completă. Curentul maxim suportabila (chiar si cu maxim de radiatoare si ventilatoare) este de 2 Amperi pentru 4988, şi 2.2 Amperi pentru 8825.
Întreaga scală de tuns este deci de două sau de trei ori mai mare decât ceea ce ar fi rezonabil. Cu o scala completă atât de mare ajustarea tuns devine două sau de trei ori mai greu. Astfel încât să fie foarte atenţi pentru a nu merge mai mult de jumătate (cu 4988) şi niciodată mai mult decât o treime (reprezentând 8825).
în plus, doar pentru a face ajustarea chiar mai greu, unele Trimmere au nici un fundal mecanice. Vei ajunge la zero, a trece fără să observe şi să treceţi de la ’ cealaltă parte, Curentul maxim şi imediat sari siguranţe şi drivere.
ATENŢIA SUPER: Există drivere cu Trimmere care acţionează dimpotrivă. Prin care înainte de încredere conducătorilor, Este bine să se măsoare tensiune de tuns. Adaptarea la un nivel minim, invers acelor de ceasornic, tensiunea trebuie să fie minim (la zero volţi până la 100 milivolti). Prin ajustarea maximă, sensul acelor de ceasornic, tensiunea ar trebui să fie maximă (la 1.5 în 3.3 În funcţie de driverul de volţi). În cazul în care acesta nu avea mare grijă să folosească aceste drivere, întotdeauna Amintiţi-vă acest act contrar (Cine a făcut aceste PCB-URI ar trebui să fie transferat la Departamentul “curăţarea de canalizare”, înainte de el poate face orice daune mai mult).
Pentru a regla tuns puteţi trece în trei moduri
METODA 1 – LENT: Prezenta metodă este adecvată pentru iubitorii de precizie, doresc sa stiu valoarea numerică a curentului. Tensiune se aplică conducătorilor auto (chiar şi 12 sau 24 Volţi care aveţi nevoie pentru a alimenta intern pe 5 Unele drivere de volţi) dar nu se conecta motoare. Măsură tensiune între sol şi partea metalică a tuns. Regla tensiunea pentru a obţine un curent care este jumătate curentul nominal (= tensiunea de două ori şi jumătate, cu 4988, sau 2 tensiunea de ori, cu 8825). Apoi începe să facă teste de sus sau în jos, întotdeauna măsurată cu metru pentru fiecare test. Folosiţi o şurubelniţă adecvată (mai bine de plastic) şi să fie foarte atent. Desigur pentru fiecare test ar trebui să eliminaţi puterea, deconectaţi şi reconectaţi motoare de putere. De ce această metodă este foarte lent.
METODA 2 – PENTRU EXPERȚI: Setaţi Trimmere pentru ochi, Conform tabelului de curent. Apoi la un sfert şi niciodată du-te mai mult de jumătate (cu 4988) şi niciodată mai mult decât o treime (reprezentând 8825). Pentru a determina locaţia asiguraţi-vă că în cazul în care este minim (utilizaţi o mulţime de lumină şi o lentilă).
METODA 3 – PENTRU EXPERȚI: Marchează vârful de tuns (vizavi de locul plat), cu un mic semn de Sharpie. Procura o Surubelnita din plastic, o mulţime de lumină şi ochelari de protecţie. Rândul său, tuns aproximativ un sfert, sau mai puţin, înainte de alimentarea. Încercaţi motorul în mod repetat, pentru a obţine viteza maximă şi putere (Dacă măriţi curent creste cuplul, dar cu prea mult viteza maximă curent scade). Se ridică treptat viteza, până la scoici motor şi staţii de, apoi încercaţi să mutaţi-l de mai multe ori şi să se modifice curentul pentru a face du-te mai bine. Cu un pic’ Experienţa poate auzi dulce la faţa locului, asculta sunetul de motoare. Ajustările sunt făcute cu micro-paşi stabili definitiv.
Cine stie engleza bine, de asemenea, ar putea arăta acest drăguţ Pagina de Pololu care explică cum să se adapteze Trimmere.
Considerente care se aplică la toate driverele
Un singur maestru Theremino posibilitatea de a controla motoare pas cu pas până la cinci. Pentru două fire roşu şi negru, care conduc “+ 5 Volţi” şi “GND” primul pilot, alimente poate fi, de asemenea, a continuat şi alte drivere.
Mereu conecta, cel puţin firul GND, între Master şi drivere. De asemenea, amintiţi-vă să conectaţi “Resetare” cu “Somn”.
ATENŢIA: Mereu conecta un condensator la 100 UF între “VMOT” şi “GND”. Condensator trebuie să fie, Nu tip “ESR scăzută”, cu pozitive agatat până la “+”, Trebuie să fie lângă driverul modulul (la câţiva centimetri). Tensiunea de operare de condensator, trebuie să fie cel puţin 5 Volti mai multe, tensiunea de alimentare putere motor.
În absenţa acestui condensator, Puteţi crea tensiuni suplimentare periculoase, care poate duce la pierderea de comunicare USB, deteriora driverele şi, de asemenea, daune Master.
În acest caz particular, pentru a evita fenomenele de rezonanţă produse de înaltă inductanţă prezente, nu utilizaţi condensatoare electrolitice rezistenţă scăzută în serie (ESR scăzută), dar comunele 100 UF, cu aproximativ 1 rezistenţă serială ohmi. Citit avertismentele de Pololu aceste pagini:
https://www.pololu.com/docs/0J16/all
https://www.pololu.com/product/1182
Înainte de a alimenta totul trebuie să fie conectat în mod fiabil. În cazul în care vine de pe un motor de sârmă, sau link-ul GND, A4988 conducătorul auto devine corupt. Dacă dispozitivul de tuns de cotitură nu o scurtă cu surubelnita, driverul pauze toate ’ instantanee. În unele cazuri lui chip explodează şi stabileşte off la fumul de. Theremino Master trebuie să reziste la aceste Torturi, dar este cel mai bun nu să-l pună la încercare.
Acest lucru nu este să spun, că driverele sunt nesigure. Dacă nu face greseli, niciodată pauză.
Cu toate acestea vă recomandăm întotdeauna conectarea drivere, cu conectorii de sex masculin şi feminin, pentru înlocuirea rapidă şi uşoară. Vă recomandăm să cumperi cinci sau zece, pentru a obţine un pic’ Commons, şi aduce în jos preţul.
Drivere TB6600
Pe eBay poti cumpara drivere complete cu foto-cuple si destul de ieftine. Sunt singur ºofer, Asta este, va trebui să utilizaţi unul pentru fiecare motor.
Există mai multe modele pe piata, toate cu caracteristici destul de similare. Pe această pagină vom descrie doar TB6600, Dar, de asemenea, sfaturi si modele se aplică mai multe alte modele, de exemplu TB6560 care le puteţi cumpăra de pe Magazin-ino.
În următoarele două imagini veţi vedea pe TB6600, în versiunea fără container şi containere.
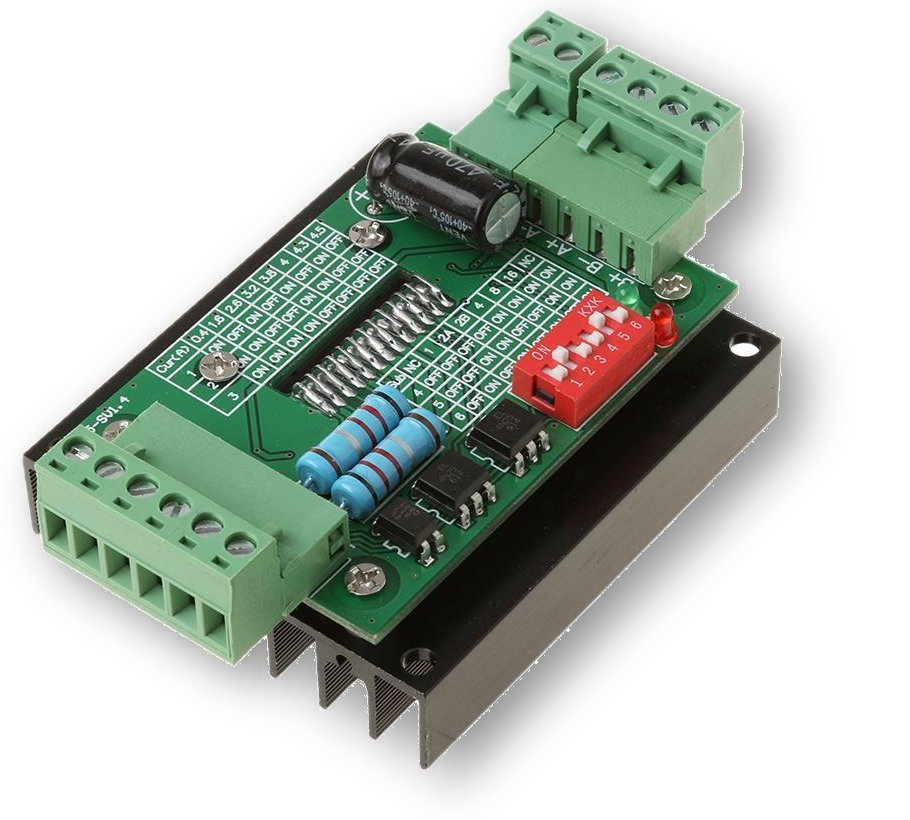

Caracteristici ale TB6600 driver
- Tensiune de alimentare 9 în 42 volţi
- Reglabil curent de până la 4 Amper
- Protecţie internă de temperatură şi de supracurent/suprasarcină
- Regulament de micro-paşi de 1 până la 32
- Photocoupled intrari cu partajate pozitiv
- Intrări pozitive să se conecteze la 5 volţi
- Intrările trebuie să fie conduse cu un tranzistor colector deschis
Legăturile dintre maestru modulul şi drivere TB6600
Pe plan intern TB6600 drivere (şi ca), Foto-cuple sunt conectate la pozitiv prin rezistenţe 330 ohmi. Apoi pentru a pilot-le în mod credibil, trebuie să utilizaţi o tensiune pozitivă a 5 volţi. Ieºirile Învăţătorului modulul, care furnizează tensiuni între zero şi 3.3 volţi, Nu poate fi legat direct aceste drivere.
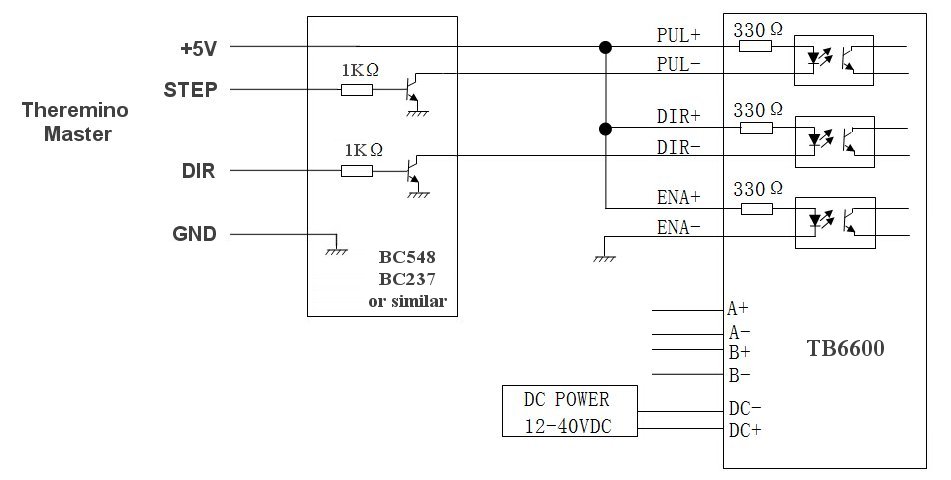
în plus, Deoarece foto-cuple sunt conectat permanent la pozitiv, şi le pilot la intrare lor negative, Rezultă că unul trebuie să le conduc cu un tranzistor open-colector. Tranzistorul face o inversie de semnal, de ce ajungi la lumina foto-cuple atunci când semnalul de ieşire de Master este mare.
Unii s-ar putea înțelege mai bine următoarea imagine, care este mai realist (Datorită Armando care a trimis).
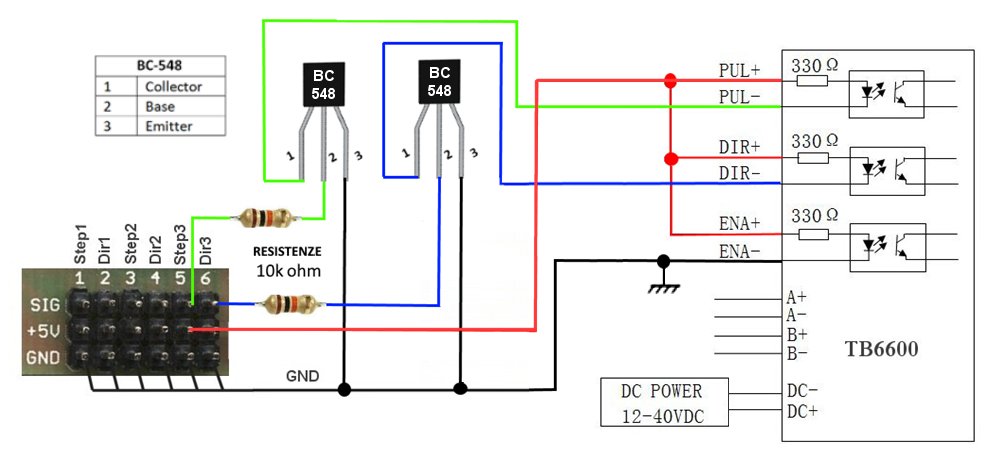
În prima imagine am folosit rezistențe 1k, că eu sunt un pic’ coborâșuri și irosit câteva miliamperi. Deoarece curentul care urmează să fie condus este scăzută vă poate fi ridicat până la 10k. În practică, puteți utiliza, de asemenea, orice rezistor intermediar, de exemplu 2.2K, 4.7k o 8.2k.
Cele două tranzistoare și cele două rezistențe, sunt adaptoare de tip open-collector. Puteţi construi pe fire conectarea ei înşişi aşa cum sa explicat în Această secţiune, sau pe o placă de circuit imprimat urmând Acest proiect.
Se pare că aceste drivere pot lucra, de asemenea, prin conectarea ieşiri de intrari Master K- PUL-, Dar imunitatea la zgomot electrice ar fi limitate şi riscul de a pierde paşi ar fi foarte mare.
Conecta la maşinile cu portul paralel

Deconectaţi cablul de aprindere la paralela, vă conectaţi-l la Adaptor de Theremino CNC, şi vom începe imediat de lucru. Acest adaptor pot fi utilizate pentru Mach3 sau LinuxCNC (cu plugin-ul necesar), dar mai bine, cu aplicarea Theremino CNC, Este mult mai uşor de utilizat.
https://www.theremino.com/hardware/adapters#cnc
Servo controale
Există tot felul de acţionare şi putere. Servos sunt ideale pentru numeroase aplicaţii, conecta la orice Pin de Master Theremino (până la 6 contemporanii) sau la pinii pe sclavi “Robul” care pot zbura până la de 10 de fiecare. Alegeţi “Robul” Cum de a PIN-ul de tip şi de a lucra imediat. Să încerce să le, Faceţi clic pe coloana corespunzătoare valorii de aplicare HAL, şi pentru a muta mouse-ul, apăsat butonul din stânga.

MG930 a marcat, de asemenea, TGY930, Acesta are o poziţionare precizie cel puțin cinci ori mai mare, în comparaţie cu toate celelalte modele. Fiind digitale, Ea are un curent de pornire destul de mare şi un sunet de înaltă ţinută morală despre 400 Hz. Gama este aproximativ 140 grade.

HX5010 este foarte puternic, mai puţin precisă decât TGY930 dar foarte ieftine, costurile de numai 4 euro şi it's în valoare toate. Excursie = 200 grade.

HTX500 este foarte mic, destul de exacte şi ieftine, Desigur, are o mare putere, dar este suficient pentru multe aplicaţii mici, El are un plin 180 grade şi chiar unele-mai.


HXT900 şi TG9e costul mai mic 2 Euro, Acestea sunt bune pentru toate aplicaţiile mijlocii şi au unul plin 200 grade.

MG958 este un monstru de putere 15 Kg/cm şi numai costurile 11 Euro. Atentie se consuma mult curent şi tu nu poate feed cu USB numai. Urmele sale: 135 grade.
Un slujitor foarte similar cu acest lucru este TGY - 1501MG, El, de asemenea, din 15 Kg/cm, similare în dimensiune şi mai uşor disponibile. Noi nu am încercat dar caracteristici sunt OK.
Rezumat al principalelor caracteristici de servo.

Aceste servo au fost alese pentru preţul, acurateţea şi puterea printre un număr mare de modele pe care le-am testat de cumpărare-le la: www.hobbyking.com (Are preţuri mari şi nave într-un timp scurt, deşi se află în SUA)
Este o altă adresă pentru servos: www.robot-Italy.com La robotul Italia nu sunt modele în această listă, dar numai foarte costisitoare şi ciudat versiuni, inclusiv cele din trei rotaţii, opt revoluţii şi continuă mişcare. Întotdeauna la Robot-Italia puteţi găsi senzori, motoare, grippers robotizate si multe alte accesorii interesant şi unic.
Înaltă performanţă servo

–
–
–
Acest lucru promite mult mai mare performanţă DS8231 la TGY930, Am încercat, dar este produs de JR şi puteţi avea încredere.
http://www.jramericas.com/45190/JRPS8231/
Caracteristicile sale sunt: Rezoluţia bine 5900 paşi pe 120 gradul de rotaţie foarte scăzut DeadBand (Constructorul spune "non-existente") Doi rulmenti distanţate rulmenti de precizie maximă puls rata de control Loop la 250 MHz pentru mare precizie curent consumul de putere uşor mai ridicate decât un slujitor normală lungimea 39.1 latime mm 19.1 inaltime mm 34.5 mm greutate 49 un cuplu de grame 1.26 Costul kg/cm 70 Euro
Măsură pas şi mort-band
Măsură precizia de servo este uşor, doar pune servo un adaptor de afişare şi apoi introduce un tub lung rigide din plastic 25 centimetri pe unul din braţele Crucii. Apoi avarii servo cu o clemă de cotitură-l cu PIN-ul la partea de sus şi cu tub paralel cu masa care se termină pe o linie de hârtie, În timp ce câţiva milimetri deasupra rândului fără a atinge o.
În cele din urmă se mută slujitor al cantitati foarte mici cu sus şi în jos săgeţile şi pot fi numărate pe linia câte mişcări mici sunt văzute de a face pentru fiecare milimetru, Acestea sunt “Pas”
Pentru a măsura mort-trupa merge prima într-un fel şi apoi începe să se întoarcă cu sus şi în jos săgeţile până când veţi vedea că începe să se întoarcă, de câte ori aţi apăsat săgeată, cu un simplu calcul, indică lăţimea de banda de morţi.
Nelimitat rotatia si cuplul servo cu variabila

În mod normal servos au o rotaţie de aproximativ 180 grade, dar, pentru unele aplicaţii ar fi preferat de rotaţie nelimitat motoare. În mod normal în aceste cazuri folosind motoare pas cu pas, dar ei au dezavantaje.
Steppere necesita un circuit de complexe, necesită rampe de accelerare şi decelerare şi au un cuplu foarte mic. Cu Steppere dacă va accelera prea repede, sau depășește cuplul critice şi viteza, pierzi distanţă şi apoi pierzi l ’ alinierea între software si hardware.
Să depăşească limitările de pas cu pas, cele mai scumpe masini folosesc motoare în continuă, cu feedback-ul loops şi extern cu motor poziţia senzorii de. Cu un slujitor modificată ajungem exact care, dar fără Podul circuitul de conducere, în mod normal necesare pentru motoarele continuă. Pod conducătorului auto există deja în chip de mic servo mecanismele de feedback-ul le va adăuga, cu senzori (optice sau magnetice) şi software-ul. În cazurile cele mai dificile, Vă mulţumim pentru puterea de software-ul PC, aţi putea adăuga, de asemenea, un algoritm PID.
Cu o simpla schimbare poate schimba servo pentru a le face munca în multiturn. În slujitor nemodificat, semnal de control controleaza amplasarea arborelui cotit ’. După schimbarea, semnalul controlează viteza şi cuplul, în două rotaţie.
Aici este cum tu a lua de Rob multitură cablu, conectat la un PIN configurat ca Servo_16.
| Semnal | Puterea si viteza |
| 1000 | Forța maximă și viteza maximă sensul acelor de ceasornic |
| 750 | Jumătate rezistenţă şi viteză sensul acelor de ceasornic |
| 600 | Forță minimă şi viteza sensul acelor de ceasornic |
| 500 | Servitorul se află încă |
| 400 | Forță minimă şi viteza invers acelor de ceasornic |
| 250 | Jumătate rezistenţă şi viteză invers acelor de ceasornic |
| 0 | Forța maximă și viteza maximă în sens antiorar |
Toate servos sunt editabile pentru funcţionarea multi-rotund, dar ne-am pregătit modele numai pentru HXT900. Aceste servo au multe avantaje, consumă puţină energie, poate fi alimentat de la USB şi costa doar doi euro de la HobbyKing: HobbyKing.com _ HXT900 (Când ai comanda de la HobbyKing a face a lua unele stive de 10 extinderea duce: la 30 cm şi la 60 cm)
Cu servo HXT900 viteza de rotatie este reglabil, la câteva runde pe minut la aproximativ 80 ROT/MIN, şi cuplul este reglabil la minim (se opreşte, de îndată ce te face un pic de efort) până la 1.6 Kg/cm (Nu te poţi opri PIN, Strângeţi-l cu degetele).
Următorul tabel arată puterea si viteza care pot fi obţinute de la un HXT900, transformarea rotaţie într-o mişcare liniară cu tije filetate sau roata de transmisie.
| Metoda |
Mm la revolutie |
Viteza maxim (mm/min) |
Puterea maxim (Kg) |
| Barul filetate 1 mm/rot | 1 | 80 | 60 |
| Barul filetate 2 mm/rot | 2 | 160 | 30 |
| Barul filetate 4 mm/rot | 4 | 240 | 15 |
| Diametrul rolei 3.2 mm | 10 | 800 | 6 |
| Diametrul rolei 5 mm | 15 | 1200 | 4 |
| Diametrul rolei 10 mm | 30 | 2400 | 2 |
| Diametrul rolei 20 mm | 60 | 4800 | 1 |
Caracteristicile HXT900 indica 1.6 Kg/cm. Apoi o HXT900, scripete 20 mm în diametru, ar putea ridica 1.6 Kg. În acest tabel, pentru a fi pe partea în condiţii de siguranţă, Am calculat 1 Kg.
Modifica un servo HXT900


Elimina etichetele adezive pe ambele părţi, deşurubaţi cele patru şuruburi, Deschide servo şi taie de trei fire de roşii, aproape de circuitul de bord.


Trageţi bolţ motor, parada potentiometru la sediul central. Taie cu cleşte metal file, în cazul în care sunt sudate fire.


Scoateţi două unelte din arborele şi a face away cu cleşte toate piesele interne, care împiedică rotirea. Verificaţi că arborele se transformă în mod liber.


Taie cu cleşte doi dinti care se află pe ’ mai mare chainring.
Filet potentiometru în locul sens giratoriu. Aluneca unelte pe pinii, pornind de la cel mai mic. Toate Angrenaje merge cu fund mare, spre motorul. L ’ chainring mare, asta aduce bolţ motor, nu ar trebui să fie presat prea, dar numai pentru a obţine mai aproape de alte unelte, fără a le atinge.


L ’ imaginea stânga este o schema si functionale, cel din dreapta indică modificări pentru a face şi în cazul în care pentru a pune rezistenţe.
Adăugaţi două sau trei mici rezistenţe SMD (0603), după cum se specifică (click pe imagini pentru a le mari)
Există, de asemenea, o HXT 900 cu circuit diferit de cel arătat aici. În acest fişier există scheme şi toate informaţiile de care am putea găsi. Din păcate, foaia de date este în chineză: uploads/files/HXT900_Type2.zip
În cele din urmă aproape motorului şi încercaţi.
Editare servo decât HXT900
Este imposibil de a oferi instrucţiuni pentru toate tipurile de servo existente. În acest fişier există toate informaţiile, foaia de scheme şi date, Le-am colectat până acum: uploads/files/ServoInfoAndDatasheets.zip
Multi-rotund robul comerciale
În cele din urmă, producătorii au descoperit această posibilitate. Catalog Pololu există deja patru modele, cu preţuri de la 5 Euro până la 15 Euro. Linkul de mai jos arata cel mai mic, dar la acest link, şi de a explora întreaga Catalog Pololu, şi nu numai pentru motoarele:
http://www.pololu.com/product/2820
Principii de funcţionare normală servo şi multiturn
Fiecare model de slujitor diferă mecanic şi electric, dar principiile sunt aceleaşi pentru toate servo: uploads/files/ServoCircuitsAndTimings.zip
Funcționarea standard servo.
- Semnalul de la 0.5 în 2.5 MS, este transformată în servo chip, la o valoare care variază de la 0 la trei volți.
- Potentiometru mici în interiorul servo (În funcţie de cum este transformat), De asemenea, el furnizează o valoare de 0 în 3 Volţi .
- În cazul în care două tensiunile sunt egale, tensiunea de jetoane la motor nu.
- Ca doua tensiuni, deviază de la fiecare alte, chip-ul de mai multe şi mai mult puterea la motor.
- Tensiunea de la motor este dat într-un mod, sau în direcţie opusă, Depinzând dacă tensiune mai mare sau alte.
Multi-rotund operaţiunea servo.
- Potentiometru este înlocuit cu două rezistoare fixe, simularea potentiometru întotdeauna în mijlocul rasa lui.
- Tot ceea ce este exact ca şi normal servo.
- În cazul în care semnalul de comanda este pe jumătate (1.5 MS), apoi două tensiunile sunt echivalente şi chip nu furnizează putere la motor.
- Ca doua tensiuni, deviază de la fiecare alte, chip-ul de mai multe şi mai mult puterea la motor, într-un fel sau altul.
Cât de mult puterea de trimis la motor?
- Cip din interiorul robul acţionează ca o "componentă de reacţie".
- Reacţia are loc în buclă închisă de servo pentru "normală" sau "feedback".
- În multi-rotund robul este o simplă reacţie sau "ureche".
- În ambele cazuri există o curbă de reacție.
- Curba de răspuns, În funcţie de semnal de control al (deviația dintre tensiunile două), determină tensiunea la motor.
- Curba de răspuns este un fel de "S" cu un loc plat, în centrul.
- Panta curbei (forta de reactie) este reglementată de un rezistor.
- Loc plat în centrul (zona moarta) se ajustează folosind un rezistor doua, care determină lăţimea.
- Teoretic ar fi mai bine să aibă o mulţime de reacţie şi scurt zona moarta, dar să nu exagerăm.
- Dacă vă exagera parametrii de reacţie, motorul este mai ferm şi puteţi obţine chiar să se balanseze violent.

Fara perii servomotors


Sunt motoare cu sau fără perii, de toate tipurile, incepand de la cateva grame greutate până la despre 10 Putere KW
În catalogul: puteţi găsi motoare cu preţuri mari şi controller a-pilot-le cu curenţi de până la www.hobbyking.com 300 amperi cu semnalele standard a sistemului Theremino.
Cu fiecare “Sclav” de tip “Robul” Puteţi controla motoare independente până la zece.
Imaginile arată un 6 Kilowaţi (125 Amper în 48 Volţi) şi un controler mici pentru motoare fără perii.
Unele dintre cele mai interesante exemple de motoarele selectate
Catalog HobbyKing s-a schimbat. Am avut de ales motoarele s-au schimbat link-uri şi acest lucru pentru noi este o problemă, deoarece în cazul în care vom publica linkuri şomeri vom penaliza.
De asemenea Catalogul HobbyKing a devenit mai greu pentru a vedea, De ce nu pot comanda motoare pentru putere. Deci, cel mai bun putem face este punct prima pagina a motoarelor câineghid, sortate după mărime:
https://hobbyking.com/en_us/electric-motors-1/size.html
Exemple de controlere pentru motoare
Controler de 6 Amperi. pentru motoare fără perii (FĂRĂ PERII) – despre 6 Eurohttp://www.hobbyking.com/hobbyking/store/__4318__TURNIGY_Plush_6A_8bec_6g_Speed_Controller.html
Controler de 25 Amperi. pentru motoare fără perii (FĂRĂ PERII) – despre 8 Euro
http://www.hobbyking.com/hobbyking/store/__11616__Turnigy_AE_25A_Brushless_ESC.html
Controler de 20 Amperi pentru motoare cu perii (PERIAT) – despre 3 Euro
http://www.hobbyking.com/hobbyking/store/__9090__Turnigy_20A_BRUSHED_ESC.html
Controler de 30 Amperi pentru motoare cu perii (PERIAT) – despre 6 Euro
http://www.hobbyking.com/hobbyking/store/__6468__Turnigy_30A_BRUSHED_ESC.html
Motoare în catalogul Pololu
Se recomandă să înceapă cu acest link, şi de a explora întreaga Catalog Pololu, şi nu numai pentru motoarele. La Pololu totul pentru DIY.
http://www.pololu.com/category/22/Motors-and-gearboxes
Motoare în catalogul Solarbotics
De asemenea, aici sunt motoare (şi alte piese utile pentru factorii de decizie). Costa mai mult, dar este în valoare de o privire fiecare acum şi apoi, chiar şi în acest catalog:
https://solarbotics.com/product/gm2/
https://solarbotics.com/catalog/motors-servos/gear-motors/
ATENŢIA: Link-uri către firme comerciale ar putea sugera o publicitate ascunse, pentru că trebuie să specifici l: Nimeni nu dă roade și nu am schimbat un singur e-mail cu oricare dintre companiile enumerate aici. Deci, suntem liberi să vorbesc despre bine şi rău decât oricine şi noastre “Shopping Sfaturi”, Acestea sunt doar util informaţii, obţinute în timpul cercetării noastre de componente.
ServoPID
Acest modul este un H-pod care poate controla motoare de curent continuu până la cincizeci de wați (până la câteva amperi și peste treizeci de volți) și rotiți-le în motoare servo.
Mulțumim producătorul și vânzătorul de eBay MaxTheremino, care a pregătit ușor plăcile cu circuite imprimate și kit-uri pentru acest proiect. Urmărește de link-ul MaxTheremino pe eBay și dacă el le-a avut încă scrie-l cataloga să le-a trimis.
Cei care preferă să cumpere doar componentele și imprimați tehnicile PCB DIY, Acesta va fi amplasat în fișierul comprimat toate fișierele necesare pentru a construi acest modul.
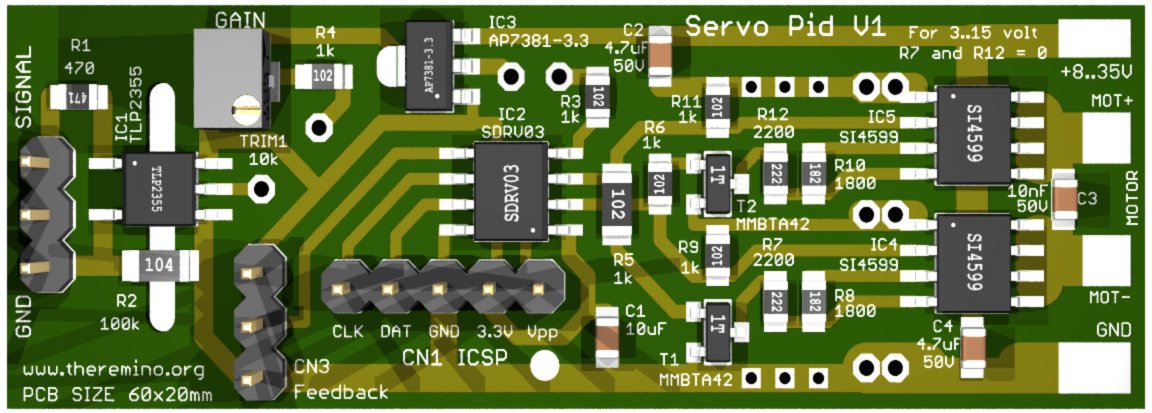
Plăți de imprimare în format Eagle, imagini, simulări LTSpice şi scheme de:
ServoPID_V1.zip
Semnalul de control poate fi un semnal clasic “Robul” sau “PWM”, care poate veni dintr-un modul Master, de unul IotModule, la o netmodul la, sau chiar de la un control de la distanță pentru modele de avioane.
H-pod este controlat de un PIC micro-controler, Programabil cu firmware-ul pe care le-am pregătit pentru diverse nevoi. În cel mai simplu caz se execută un motor înainte sau înapoi, reglarea vitezei. În cazurile mai elaborate cu ajutorul unui potențiometru pentru a măsura poziția și reglează poziția cu un algoritm PID.
Cu potențiometru și PID are aceeași operațiune a clasicilor “Robul” dar, Servant comercial Spre deosebire, aveți posibilitatea de a varia fiecare parametru, area morta, Rezoluția de măsurare a ADC și coeficienții PID.
Spre deosebire de semnal normal de intrare servo este izolat cu un optocuplor. Acest lucru permite păstrarea în totalitate a separa masa circuitului de alimentare a motorului de cea a PC-ului de control. Acest lucru va elimina radical interferențe electrice care ar putea provoca defecțiuni.
WIRING
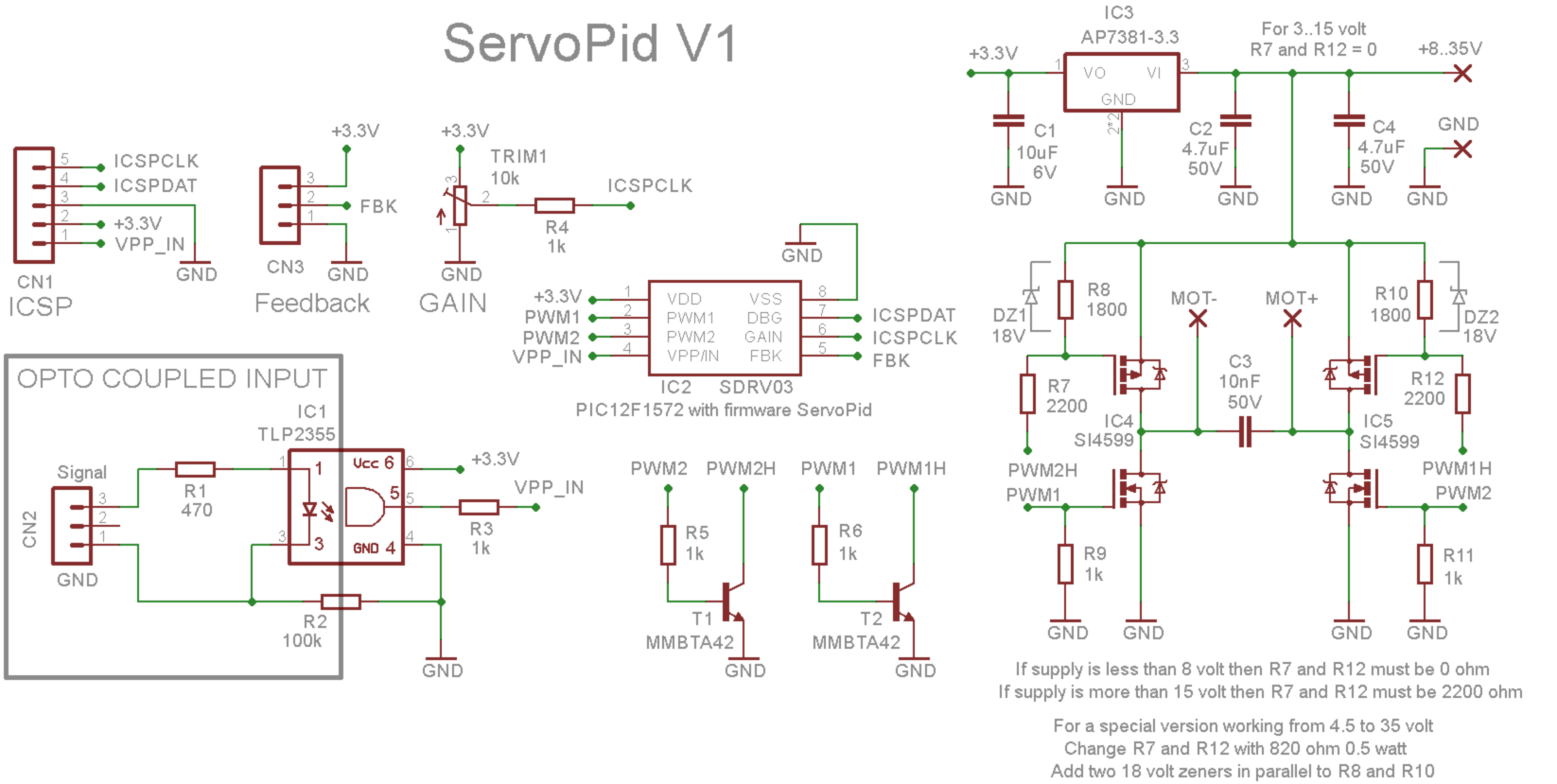
Semnalul de comandă, servomecanismului sau pwm, Acesta este conectat la conectorul CN2, prin R1 care limitează curentul la câteva miliamperi și pilot LED-foto-cuplor.
Amplitudinea semnalului de comandă trebuie să fie de la 3 în 6 Volţi, timpul de impuls pozitiv trebuie sa fie intre 500 în 2500 ne (despre), și rata de repetiție de 50 Hz la 500 Hz.
Semnalul de comandă continuă prin IC1 foto-cuplaj, prin R3 și ajunge la pinul 4 de micro, care măsoară timpul cu rezoluție mare (treizeci de secunde de microsecundă).
Conectorul “ICSP” Acesta este utilizat pentru a programa PIC cu firmware-ul de control și, de asemenea, pentru a conecta un convertor USB serial pentru depanare. A se vedea secțiunea următoare “FIRMWARE”.
Dacă configurați firmware-ul folosind PID-, apoi conectorul “Feedback-ul” Acesta trebuie să fie conectat la un potențiometru de măsurare poziție. De obicei, acest potențiometru este cuplat rigid cu arborele de ieșire, care este deplasată de către arborele de antrenare prin intermediul unui reductor sau curea. Potențiometrul feedback-ul poate fi, de asemenea multitură și trebuie să fie un potențiometru liniar, cu valori în mod normal, între 1 k ohmi şi 10 k ohm. Centrala potentiometru trebuie să fie conectat la conectorul central de, sârmă în diagrama are numele FBK.
În cazul în care feedback-ul are loc pe dimpotrivă, puteți schimba cele două conexiuni laterale ale potențiometru între ele. Dar fii atent că centrul trebuie să fie întotdeauna conectat la FBK. Dacă nu potențiometru ar putea fi încălzit și deteriorat.
l trimmer “CÂŞTIG”, Acesta servește pentru a regla manual amplificarea PID, se folosește numai cu anumite configurații de firmware și, în principal în timpul încercărilor unui motor nou, pentru a ajusta valorile PID. Rezistorul R4 decuplează de tundere de la semnalul ICSPCLK, astfel încât să puteți utiliza semnalul ICSPCLK pentru depanare cu serial.
Regulatorul de tensiune “IC3” creează o tensiune de 3.3 Volt foarte stabil. Această tensiune alimentează micro-controler, potențiometru de feedback, Qtr1 mașina de tuns și IC1 optocuplor.
Cele două semnale de ieșire de la PIC, cu numele și PWM1 PWM2, Fly pod format prin patru MOSFET conținute în SI4599 cip. Podul este închis cu o frecvență mare semnal PWM (în mod normal 16 sau 32 KHz), care reglează turația motorului și o face se rotească într-o direcție sau alta. În timpul comutațiile PIC asigură că cele două ramuri ale podului nu sunt închise simultan (care ar fi scurt-circuit sursa de alimentare).
Tensiunea de alimentare trebuie să fie adaptată la motor, dacă este prea mult motorul poate arde. Dacă nu efectuați modificări la schema poate fi utilizată pentru a tensiuni de alimentare de la 8 în 35 Volţi. Diagrama arată modificările care urmează să fie făcut pentru a permite altor doua putere gama de alimentare. Prima gama (la 3 în 15 Volţi) Este nevoie doar scurt R7 și R12. Al doilea interval (la 4.5 în 35 Volţi) Acesta necesită înlocuirea R7 și R12 și, de asemenea, pentru a adăuga două diode Zener 18 Volţi.
FIRMWARE
La conectorul ICSP conectarea unui programator PICkit2 (a se vedea Această pagină). Rețineți că fișierul PK2DeviceFile.dat, care include, de asemenea, PIC12F1572 utilizat în acest proiect, Este valabil numai pentru PICkit2. Deci, cel mai probabil cu PicKit3 să nu fie în măsură să programeze acest PIC (sau cel puțin nu știm cum să-ți arăt).
În ZIP descărca la sfârșitul acestei secțiuni veți găsi fișierul ServoPid35.hex deja finalizate și gata pentru a fi scris în PIC cu PICkit2.
Acest fișier este cel mai simplu de control versiune. Prin variația semnalului de control de la minim la maxim se deplasează motor cu viteză variabilă, în cele două direcții. Cu semnalul de comandă într-o poziție centrală, motorul se oprește.
TRANSMITERE DATE REMEDIERE DIN FIRMWARE SERIAL
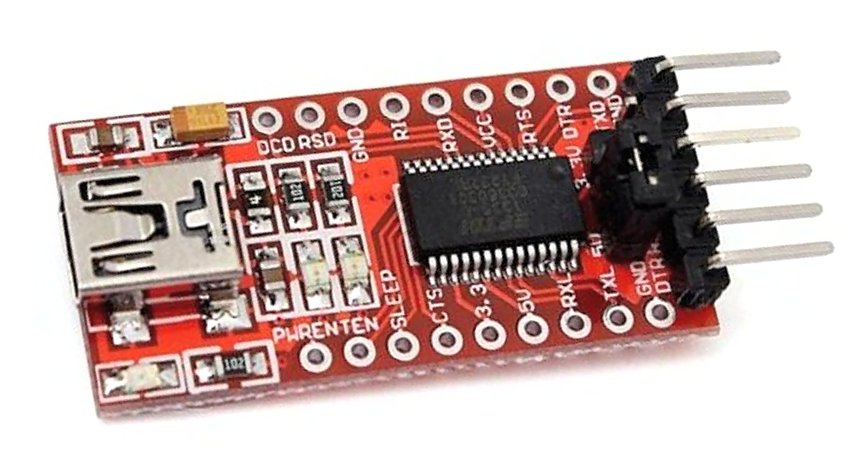
ICSPCLK sârmă conector ICSP este, de asemenea, utilizat pentru a trimite date de depanare de la firmware-ul la linia de serie. Pentru al utiliza, trebuie să vă conectați GND și ICSPCLK la GND și RX PIN-ul unui convertor serial-USB, cum ar fi ceea ce se vede în această imagine.
Apoi modificați firmware-ul pentru a trimite valori depanare serial, primirea de date cu aplicația Terminal și, opțional, afișarea lor cu SignalScope sau alte aplicații ale sistemului nostru.
EDIT ȘI recompilați FIRMWARE
Pentru a modifica parametrii de funcționare și să pună în aplicare cele mai complexe de control versiune (poziție de control cu feedback-ul și PID) trebuie să editați fișierul ServoPid35.bas și recompilarea. Compilația creează un fișier HEX care poate fi scris în PIC cu PICkit2.
Pentru a edita fișierul vă recomandăm să utilizați excelent FineLineIDE și pentru a compila ProtonCompiler.
Ambele acestea sunt gratuite și le puteți descărca de următoarele link-uri:
www.protonbasic.co.uk/content.php/2077-FineLineIDE
www.protonbasic.co.uk/vbdownloads
Instrucțiunile și comentariile utile pentru a modifica firmware-ul poate fi găsit în fișierul ServoPid35.bas iar la sfârșitul fișierului, veți găsi un glosar de termeni utilizați și instrucțiuni pas cu pas pentru a regla parametrii PID.
Tine minte acest lucru este un firmware complex și nu va fi ușor de învățat și de utilizat într-un mod corespunzător toate opțiunile sale. Cea mai grea parte este cu siguranta regla parametrii PID, în scopul de a evita și de oscilație, în același timp, obține un răspuns prompt și o zonă de dimensiuni mai mici poate muri.
Am făcut tot posibilul pentru a facilita ajustarea parametrilor PID, folosind metoda Ziegler-Nichols și simplifica în continuare. Am corectat, de asemenea, unele erori ale metodei Ziegler-Nichols a publicat pe Wikipedia, dar setarea parametrilor pentru un nou sistem de (motor, reduceri și feedback), Rămâne o operațiune de către specialiști.
Note pentru firmware
Pentru a reduce disiparea pe MOSFET-uri, este recomandabil să setați o frecvență mai mică pentru PWM în firmware.. În mod normal, frecvența este setată la 20 KHz, dar în unele aplicații l-am redus la 2 KHz reducând problema încălzirii MOSFET-urilor la practic zero.
Singura contraindicație este zgomotul care va crește puțin. Deci, încercați să reduceți frecvența PWM și apoi verificați cu motorul dacă creșterea zgomotului este tolerabilă.
Descărca fișiere FIRMWARE
În următorul text veți găsi ZIP fișiere:
– ServoPid35.hex gata pentru a programa PIC în buclă deschisă versiune simplă.
– ServoPid35.bas pentru a edita și recompilațicu FINELINE IDE
ServoPid_Firmware.zip