
Motores de passo (Steppers)

ATENÇÃO: Para habilitar o tipo de pino deslizante, Stepper_Dir e Pwm_Fast, você deve usar pelo menos o Versão 5.0 o HAL, e a forma Theremino mestre deve ser atualizado com o firmware 3.2 ou posterior.
Para descobrir qual firmware você tem apenas o uso o mais recente HAL, conectar o mestre e contar os pinos. O firmware original só tinha seis pinos, da versão 3.2 Eles 10 e desde a versão 4 Eles 12.
O firmware mais recente (4.0) Adicionar seis novos Master Pin (passando 6 PINO para 12 PIN). Por conseguinte, com cada mestre módulo, Você pode controlar, de três motores mais seis pinos genéricos até cinco motores mais dois pinos genérico. Opcionalmente, você pode adicionar adicionais mestres e escravos.
Características de controle deslizante com firmware Theremino:
- Estilo ultra simples de gerenciamento de thereminico.
- O software deve enviar apenas um dado, o destino em milímetros (Nota 1)
- Escala de trabalho útil de -10 em +10 km (Quilômetros) (com passos para mm = 200)
- Gerenciamento de até cinco eixos de máquinas CNC.
- Gerenciamento de máquinas do tipo RepRap até seis motores (x, y, z, De acordo com pórtico de z e duas extrusoras). Você então pode expulsar duas cores.
- Além disso 65 KHz de frequência máxima em todos os cinco motores simultaneamente (Nota 2)
- Tremulação de menos de 20 nano-segundos (Nota 3)
- Velocidade máxima ajustável (De 1 em 18000 mm/min) (Nota 4)
- Aceleração máxima ajustável (De 5 em 1000 mm/s/s) (Nota 4)
- Relatórios das auditorias a posição alcançada, em milímetros, para cada eixo (Nota 5)
- Possibilidade de utilizar eixos independentes ou coordenados em 2D e em 3D (Nota 6)
- Com os eixos coordenados em 2D ou 3D, Escrever aplicativos para controle facilitado. Você não precisa calcular a aceleração e velocidade. Você pode enviar comandos de destino simples, em milímetros. (Nota 7)
- Pulsos com largura automática. Operação é simplificada e não o risco de perda de passo, causado por uma configuração incorreta deste parâmetro. Você pode usar lentes de foto-acopladores, Se você limitar a velocidade máxima (Nota 8)
- Polaridade automática. Operação é simplificada e você evita perda de passo, causada por configuração incorreta deste parâmetro (Nota 9)
(Nota 3) Como comparação: Mach3 tem um Jitter 500 vezes maior (De 2 em 15 nos dependendo do PC). Tem um muito baixo Jitter, permite que você trabalhe na velocidade máxima sem arriscar perder passos. Defeitos de sincronismo que Mach3 são bem explicados Neste artigo.
(Nota 4) O firmware protege o motor de cada erro. Se seu PC para de responder durante algum tempo, o firmware vem lentamente, sem perder passos. O mesmo se aplica se os dados são enviados com sincronismo irregular ou contenham erros.
(Nota 5) O software pode ler a distância ausente, cada milissegundo, para cada eixo e com elevada precisão (fração de um milésimo de milímetro). Você não precisa usar essa informação, Mas algumas aplicações podem achar que é muito confortável.. Pode ser útil para fins de diagnóstico, ou para algoritmos que devem atender uma tolerância especificada. Com esta informação, o software pode trabalhar com circuito fechado e sempre na velocidade máxima. Verificando continuamente a distância de cada motor pelo destino, o software pode retardar para baixo exatamente quando você precisar dele, sem fazer cálculos complexos de velocidade, trajetórias e acelerações.
(Nota 6) Na versão 5.0 a coordenação do eixo HAL não está completa. Aplicações importantes se cuidam sozinhos, Estamos, portanto, focando o aplicativo CNC Theremino, e só depois de terminarmos a coordenação de eixos.
(Nota 7) Os destinos intermédios são redefinidos, até 500-1000 vezes por segundo. A melhor rota, continuamente é recalculada. O algoritmo de controle leva em conta, as posições reais de cada motor e uma aceleração máxima que pode suportar. Embora o aplicativo CNC calcula o caminho errado, de qualquer forma evitar perder passos.
(Nota 8) Normalmente você tem que especificar a largura dos pulsos (com Mach3 de 1 em 15 nos). Este é um mal compreendido e muitos usuários regulação-lo aleatoriamente. Pulsos de ampla utilização permite colocar lentes de dispositivos eletrônicos, como uma foto-acopladores (por exemplo o 4N25 barato, 4N26 e 4N27). Mas folgados impulsos restringem a máxima utilizável. Regra Theremino desta vez 50 nos (permitindo que você use lenta eletrônica para máquinas mais lentas), Mas ele reduz automaticamente se você usar altas velocidades e altos valores de microstep. Para um mínimo de 7.7 nos, Ao usar a frequência máxima (65.535 KHz).
(Nota 9) Com outros geradores de pulso (como Mach3) Você tem que especificar a polaridade do pulso. Para configurá-lo é necessário saber se o motorista age sobre a borda de subida ou descida. Esta informação não está sempre disponível e se você conseguir pode acontecer esporadicamente passo errado perda, muito difícil de detectar. Teoricamente, usar a frente errada não deve causar quaisquer problemas, Porque em cada borda de subida, segue necessariamente uma borda de queda. Mas, Se o sinal de direção é atualizado na hora errada, pode perder passos, ou tomar medidas adicionais. O firmware do Theremino mestre controla o sinal de direção com cuidado. O sinal também pode ser usado para motoristas de carro (uma minoria) atuando na borda de queda. Eliminando este ajuste, o uso é mais fácil e elimina o risco de perder passos.
Defina o tipo de pino deslizante no aplicativo HAL
Cada motor de passo precisa de dois pinos físicos, um passo e outro para a gestão. O microcontrolador, colocar-se-ia o pino ao prazer, Mas nós decidimos limitar a confusão, especificando posições predefinidas, para Stepper_Dir e tipo pino deslizante.
O tipo de pino deslizante leitura de um valor, que é simplesmente o destino em mm. Aplicações simples, pode especificar um destino longe, e deixá-lo fazer todo o firmware. Aplicações mais exigentes, pode calcular o seu próprio caminho e enviar frequentes destinos intermédios. Com esta técnica, um aplicativo pode verificar a velocidade de trabalho (alimentos para animais), e determinar precisamente o caminho, mesmo em múltiplas dimensões. Fazer movimentos suaves, só 20 destinos por segundo (até 50 para as aplicações mais exigentes).
Reverter um eixo:
Para inverter o sentido de movimento de um eixo, Eles trocam os valores “1000” e “0”, de caixas “1000 significa mm” e “0 significa mm”.
Parâmetros específicos do tipo pino deslizante:
Velocidade máxima – Esta é a velocidade mais rápida, em milímetros por minuto. O firmware verifica continuamente os destinos enviados pelo software. Se o software é pedir demais para o motor, o firmware restringe sua velocidade, para evitar a perda de passos. Aumentar esse valor até ver que o motor vai perder passos (Faz um ruído agudo e paradas) e então reduzi-lo por um 20..50%, para retornar para uma área segura. Repetir os testes sob carga, ou por travagem o motor manualmente, Então, verifique se que você tem algum espaço.
Max Acc – Esta é a aceleração máxima (e desaceleração), em milímetros por minuto. O firmware verifica continuamente os destinos enviados pelo software. Se o software é pedir demais para o motor, o firmware restringe sua aceleração, para evitar a perda de passos. Aumentar esse valor até ver que o motor vai perder passos durante as mudanças de direção (Faz um ruído agudo e paradas) e então reduzi-lo por um 20..50%, para retornar para uma área segura. Repetir os testes sob carga, ou por travagem o motor manualmente, Então, verifique se que você tem algum espaço.
Passos para mm – Aqui você tem que definir o passo, o motor está em um beco sem saida, multiplicado pela microstep, Defina o controlador, e dividido em milímetros, produzido por uma rotação do motor. Se cada rodada, produz um milímetro de movimento, e o motor é um 200 passos por revolução, e não use o microstep, em seguida, você define o valor: 200 (passos por revolução) x 1 (microstep) / 1 (mm por revolução) = 200. Se usando microstep dezesseis, em seguida, você definir o valor: 200 (passos por revolução) x 16 (microstep) / 1 (mm por revolução) = 3200.
Ligada à anterior – Permitindo que esta caixa de seleção, o motor é conectado ao anterior, e, portanto, parte de um pool, executando as interpolações 2D, 3D, 4D ou d 5. Sem esta interpolação, o motor precisa fazer menos estrada, chegar cedo e então o caminho, seria uma linha quebrada, composto por dois ou mais segmentos. Permitindo a interpolação, a velocidade de todos os motores é coordenada, para que a trajetória real, é uma linha reta. Aproveitando esta coordenação, o software de controle pode, em alguns casos, simplificar consideravelmente (na versão atual do HAL não é implementada a coordenação de eixo, o acabamento em próximos lançamentos)
Atualização de fevereiro 2015: Talvez essa opção não é tão importante, como nós pensamos no início. Nós provavelmente vai acabar antes de outros projetos mais urgentes. Possivelmente, escreva para nós, Se precisar urgentemente.
O tipo de pino Stepper_Dir tem sem parâmetros para ajustar. Eu sou apenas um espaço reservado para o teste físico pino de saída, estabelecer a direção do motor. Não é necessário usar o valor, que esses pinos estão escrevendo na ranhura, Mas algumas aplicações podem encontrá-lo útil. O valor que está escrito na ranhura, é a distância até o destino, em milímetros (e até frações de um milésimo de milímetro). Esta informação pode ser usada para fins de diagnóstico, ou para algoritmos que devem atender uma tolerância especificada. Com esta informação, o software pode trabalhar com circuito fechado e sempre na velocidade máxima. Verificando continuamente a distância de cada motor pelo destino, o software pode retardar para baixo exatamente quando você precisar dele, sem fazer cálculos complexos de velocidade, trajetórias e acelerações.
Exibir os detalhes do pino

Pino detalhes mostram a aceleração e velocidade máxima em Hz (passos por segundo). Esses valores são úteis para a eletrônica do projeto, Durante o teste e para determinar quantos micropasso utilização. Em alguns casos, Pode ser útil saber o alvo difícil (em passos), no lugar de destino em mm.
No aplicativo HAL, Dê um duplo clique na linha do pino (Tipo de seletor). Na segunda janela, na parte inferior, Você leu os detalhes do pino selecionado. Clique na imagem para uma visão ampliada.
Vídeo mostrando a precisão dos impulsos produzido pelo mestre módulo, do que Mach3


Vídeos no YouTube:
http://www.youtube.com/embed/CeC5WD4866o?fs=1&rel=0&loop=1&hd=1&autoplay=1
Neste vídeo podemos ver a inclinação ao longo do tempo, o período entre um impulso e subsequente. A escala dos dois vídeos é o mesmo, 100 NS para Praça. O mestre Theremino produz impulsos, com um deslize da única 20 nano-segundos. Em vez disso Mach3 continuamente excede 2 micro segundos e nos piores momentos 10 micro segundos. Se você estiver viajando para 25 KHz, de Theremino mestre de inclinação é apenas o 0.05%, Enquanto o Mach3 é igual a 25%. Quando você exceder o 10% motores deslizantes estão começando a sofrer e pode perder passos. Em máquinas mais lentas Mach3 Tremulação é inofensivo e uso micropassos melhora a situação. Em todos os casos, no entanto,, na presença de Jitter, Você deve diminuir a velocidade máxima. Para obter mais informações, defeitos de sincronismo que Mach3 (e ainda pior em defeitos de LinuxCNC – EMC2), ler Este artigo e eu especialmente’imagem na parte inferior desta página.
Transferidor para motores de passo
 Baixe a imagem com o botão direito do mouse.
Baixe a imagem com o botão direito do mouse.
Este transferidor por 200 passos (1.8 graus por passo), É útil controlar a operação, motores de passo. Há muito tempo temos procurado na Web, e no fim tivemos de nos deixar. Os tamanhos de impressão atuais (75 x 75 mm) são para motores Nema 23. Com um programa para desenho, ou com as configurações da impressora, Você pode ajustar o tamanho, para motores menores, ou maior. O transferidor pode ser impresso, com uma impressora jato de tinta, no cartão.
Hackear o goniômetro Theremino CNC

Transformamos a imagem do goniômetro em GCode (com “Theremino ImgToGcode“). O GCode está entre o “Exemplos de gravura”, Theremino CNC, e chama-se “StepperMotor transferidor gc”.
Como base, recomendamos plexiglas, ou plástico colorido.
Para obter a máxima exposição, Cola uma folha de plástico fino, em uma folha grossa, cor diferente e afetam somente a folha superior.
Recomendações para motores de passo
Como um princípio básico que os motores devem ser evitados “sgranino” (ouvir um “Natasha” e a fábrica de motores). Se um conchas de motor da peça de trabalho fica corrompida. Não há nenhuma maneira de voltar e jogar o pedaço. Além de perder horas de tempo de máquina, você perde as semifinais.
Para certificar-se de que você não perca passos proceder assim: aumentar o ajuste de cada, um de cada vez, até as conchas de motor e em seguida, vá para trás um 30%, ou até mesmo 50% para estar no lado seguro. Os regulamentos são: velocidade máxima e aceleração (no HAL). Para um melhor desempenho, você também deve ajustar a corrente para o motor (um aparador no driver Módulo). O aparador pequeno deve ser filmado com uma chave de fenda apropriada e com muito cuidado. Se a chave de fenda escapa e faz um curto-circuito, o motorista instantaneamente frita (e às vezes quebra para fora).
Se o driver permite é sempre bom para definir os micropassos, pelo menos para 4. Se você não usar o motor da microetapa produz vibrações fortes. Ressonâncias mecânicas, acionado por vibração, pode fazer você perder passos mesmo em velocidades muito baixas. Para evitar isso, você deve aumentar a corrente do motor, Mas isso iria limitar a velocidade máxima.
Limitar a fricção mecânica e adicionar acoplamentos flexíveis para evitar que o motor de esforços devido os inevitáveis pequenos erros de fora do eixo. Além dos acoplamentos são desassociação o mecanismo de ressonâncias das partes mecânicas da máquina. Se a mecânica é bem feita e o motor funciona grátis, corrente pode ser reduzido e que é sempre a mais.
Minimizar a corrente do motor é importante. Você não deve definir o Max atual! A corrente especificada pelo fabricante não é o poder que você tem que usar. Mas esta é a corrente máxima, Além de que o motor aquecer tanto para estragar. Reduzindo a corrente de trabalho, minimizar a vibração e aumenta a velocidade máxima. O melhor funcionamento atual, É geralmente cerca de um quarto do que mostrado o motor.
Na presença de forte atrito somos forçados a aumentar a corrente. Mas este aumento tem um efeito benéfico, somente em baixas velocidades. Em altas velocidades não te melhorias. Com efeito, o perigo de perder a distância aumenta e você são obrigados a limitar a velocidade máxima.
Drivers para steppers
Steppers não podem ser consumidos diretamente como você faz com o Servo. Você deve adicionar um driver. Recomendamos que você evite os drivers antigos do projeto que contêm o SA1042 integrado, SA1027, Uln2003, L297 e similares. Os melhores drivers contenham fichas A4988 produzidas pela Allegro.
É a tensão máxima de A4988 35 Volts (por isso é recomendado para alimentá-los para 24 Volts) e a corrente máxima é 2 Ampère (Mas neste caso é preciso um dissipador de calor e uma ventoinha que sopra o ar por cima de todos os drivers)
 Os drivers não são ajustados para a corrente máxima suportável pelo mecanismo de!!! A corrente do motor é o mais, Além do qual os motores danificariam!
Os drivers não são ajustados para a corrente máxima suportável pelo mecanismo de!!! A corrente do motor é o mais, Além do qual os motores danificariam!
Se os motores forem de 1 Em seguida, a corrente é o ampère direito 250 Mas e 500 Mas. Então o motor não aquece, os drivers pouco calor e a velocidade máxima aumenta.
Reduzindo a corrente é reduzida um pouco’ o casal, Mas os motores correr mais suaves e permitem uma velocidade máxima superior a, antes de descascar.
Para ajustar os ajustadores de corrente, Sempre use uma chave de fenda plástica, caso contrário pode queimar os drivers ou para iniciar o fusível CncShield guia.
Drivers para controlar motor de passo

O A4988 (imagem à esquerda), são perfeitamente compatíveis com DRV8825 (a imagem à direita), mas você tem que ter cuidado que eles têm que ser montados um ao contrário do outro (Veja as imagens a seguir).
É recomendável que, os dois 4988 que o 8825, com tensão 12 ou 24 Volts e nada mais. Com 24 Velocidade máxima de volts é ligeiramente superior. O 36 Volt é melhor não usá-los porque o 4988 Não segurá-los bem e a 8825 que trabalho muito perto do limite.
Você não deve usá-los na corrente maior que 1 Ampère. Máximo 2 Ampère, Mas com cada dissipador em drivers e um único ventilador que resfria-los todos de alta #8217 &;.
Embora nestas fotos o A4988 aparecer sem dissipador de calor, quase todos os vendedores oferecem-los com o dissipador de calor.
Como um driver de porta para usar?
São definitivamente, evitar o controlador cnc com drivers soldados a uma placa. A primeira falha, que você tem que jogar o controlador de todo. Então você gastar muito, Você vai desperdiçar e poluir, mesmo indo contra os nossos princípios para limitar o desperdício.
Motoristas podem quebrar facilmente (Só um mau contato momentâneo em um mecanismo) e você não pode substituir os chips da placa, Então você joga fora todo driver controlador l & #8217;, Você perde centenas de dólares e parar que o carro leva um longo tempo. Também não é possível soldar novos drivers em um prato, Então, se começarmos a, Por exemplo,, com três pilotos, Você pode adicionar um quarto e um quinto. Isto levará a produzir controlador com quatro ou cinco motoristas, mesmo se o quarto e quinto são nunca usado, voltando-se contra os nossos princípios para limitar o desperdício.
Uma boa solução é usar motoristas com os conectores, Então, pode substituir ou adicionar facilmente.

Drivers de substituição rediculously (sobre 3 Euro) e substituir em trinta segundos. Se você comprar um estepe e você ter assegurado que a máquina nunca vai parar.
Não se deixe enganar por vendedores que não publicar esquemas e “Deixa pensar” que seus motoristas são melhores. Quando se vai para verificar os chips são os mesmos que esses drivers, É sempre bom A4988 (ou equivalente) produtos de Allegro.
E que você também atenção ao auditor soldada diretamente sobre a placa de circuito impresso principal, Sem ventoinha e dissipador de calor sem chip. Os chips irão aquecer muito, aumentando a probabilidade de falha e perder l & #8217; todo controlador.
Motorista Diretoria – Uma base de suporte para drivers
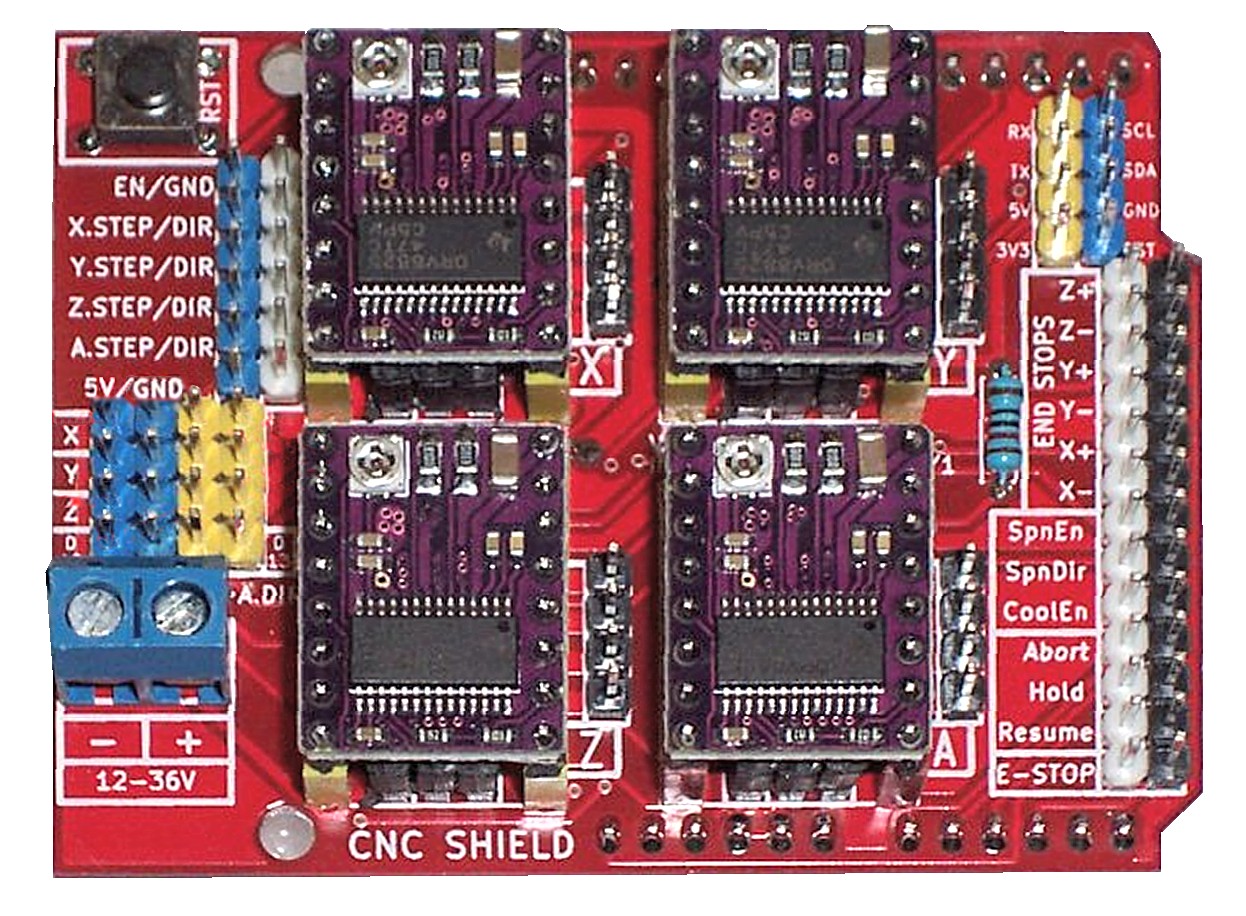
Não compre caro cnc-controlador com o chip diretamente soldado a bordo! Os drivers devem sempre ser substituíveis, como no Driver placa destas imagens.
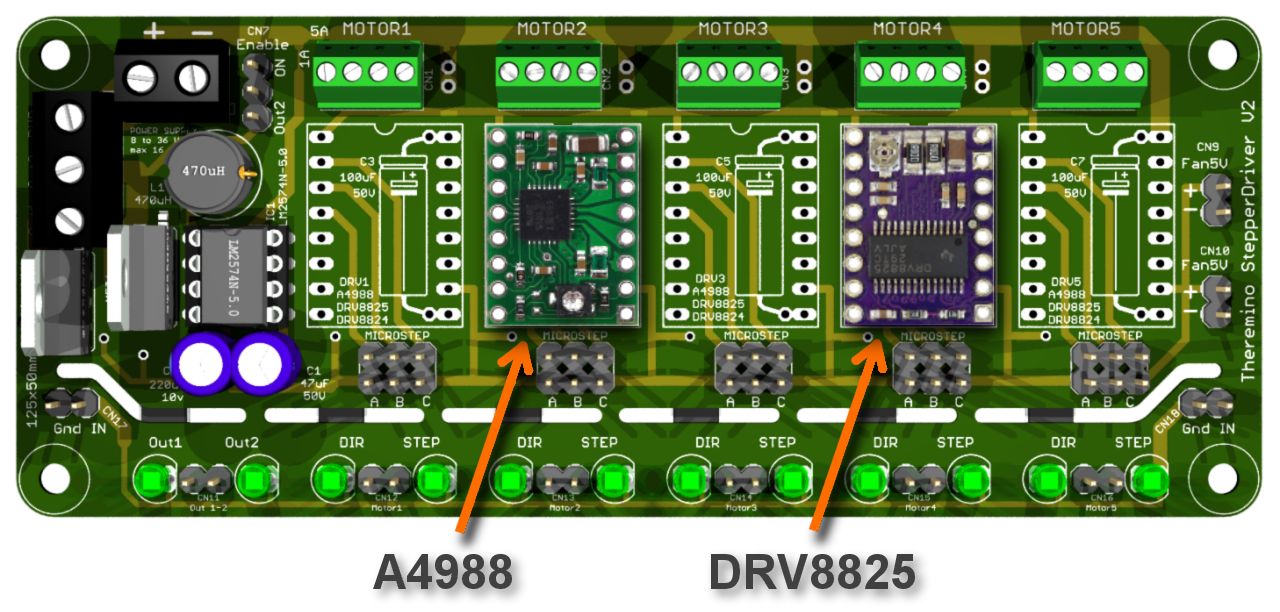
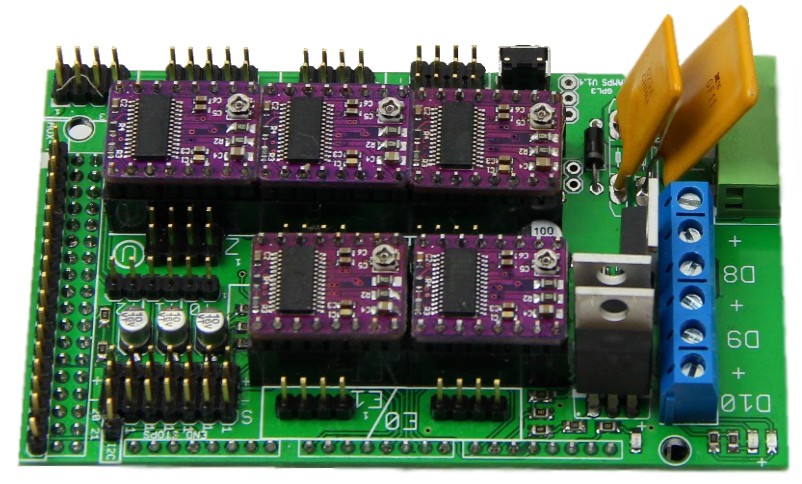
Na imagem acima, você vê a placa Theremino_StepperDriver (informações nesta página), Enquanto as duas imagens abaixo você pode ver o “Rampas” E o “CncShieldV3”. O último custo menos, Mas eu não sou optocoupled, Então eles podem gerar problemas de ruído elétrico.



Recomendo que você mantenha a máxima modularidade, para permitir que as alterações futuras, melhorias e substituições. Ou com a experimentação e as patilhas Dupont leva, ou com a placa adaptadora Theremino_StepperDriver, ou com o Rampas, ou com um CncShieldV3 (os dois últimos podem ser encontrados no eBay).




Pratos como as rampas e os CncShieldV3, Não são construídas especificamente para o sistemaTheremino, para fazer as conexões referem-se os diagramas de fiação. Se em caso de dúvida envie um email.
Coloque o driver em CncShieldV3 e em rampas de acesso
Essas imagens são válidas apenas para os drivers DRV8825, certeza de que o A4988 deve ser inserido com o aparador em toda. Para outros drivers verificar o site do fabricante.
Um exemplo de fiação
ATENÇÃO: Para habilitar os motores habilitar sinal deve ser ligado ao GND. Portanto, sempre colocar um jumper na “PT-BR / GND”. Se você esquecer de fazer isso não mover os motores de busca.


Nesta foto você pode ver um exemplo de fiação entre o mestre e CncShieldV3.
Nesta fiação nove atribuições de pinos mestre estão ligadas aos condutores de quatro e cinco InOut “de serviço”. A InOut pode servir para controlar a ignição do motor do eixo e ler o interruptor de fundo. Doesnít, ainda disponível InOut mais três, no Master.
Cabos de sinal podem ser desconectados e mudou-se a qualquer momento, mesmo com tudo ligado, Mas desde c & #8217; é uma grande e má alimentação ligada a 220 Volts, Você tem que ter muito cuidado que o chão do fio, entre CncShield e mestre, São calções, forte e sempre conectado.
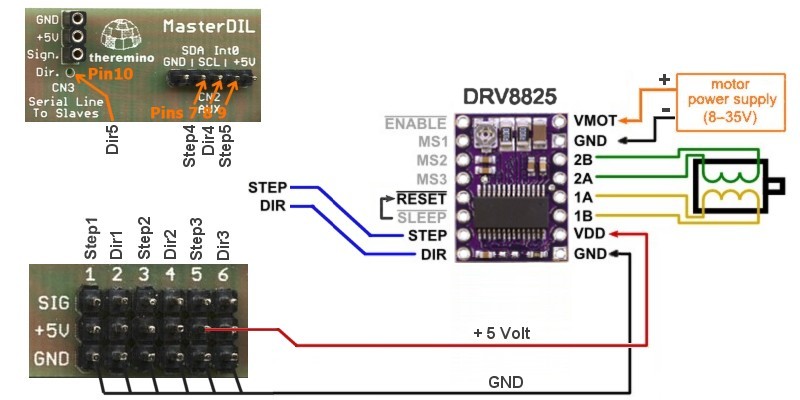
Conexões entre o mestre e drivers Theremino
Aqui nós explicamos como conectar diretamente o mestre motoristas, sem o uso de uma placa de Driver.
Motoristas A4988

Motoristas DRV8825
Configurações de microstep
| C (M0) (Ms1) |
B (M1) (MS2) |
Em (M2) (Ms3) |
Configurações de microstep Drv8825 |
Configurações de microstep A4988 |
| Baixa | Baixa | Baixa | Passo completo | Passo completo |
| Alta | Baixa | Baixa | Meio passo | Meio passo |
| Baixa | Alta | Baixa | 1/4 passo | 1/4 passo |
| Alta | Alta | Baixa | 1/8 passo | 1/8 passo |
| Baixa | Baixa | Alta | 1/16 passo | – |
| Alta | Baixa | Alta | 1/32 passo | – |
| Baixa | Alta | Alta | 1/32 passo | – |
| Alta | Alta | Alta | 1/32 passo | 1/16 passo |
Significa baixa: “Conectado ao GND” ou seja “Unjumpered”
Significa alto: “Ligado ao positivo” ou seja “Com ponte”
Pontes de rampas e guias de CncShield levam a sinais positivos, Então ficas com todos os três saltadores removidos “Passo completo”. Sempre use 8, 16 ou 32 microstep, em seguida, insira as duas primeiras pontes ou a última, ou até mesmo todos os três. E lembre-se de multiplicar, no HAL, o valor “Passos para mm” para o número de conjunto de micropassos.
ATENÇÃO: Alguns cartões (Rampas 1.4 Alguns fabricantes), Temos a seleção de microstep saltadores não está funcionando. Algum gênio do mal alterou o PCB para configurá-los para fixo 16 microstep (Por que, então, servir em impressoras 3D). Basta verificar com um pinos de jumper de seleção de testador, Se os pares de pinos estão em curto., Então é um destes cartões. Neste caso, removendo as pontes de plástico, com paciência e com a Dremel, Você pode corrigir o PCB.
Ajustar o aparador para a limitação atual
Módulo de A4988, produto para Pololu, O aparador é de 10 Kohm é conectado a 5 Volts com um resistor de 20 Kohm. Segundo a qual a tensão de referência, com o aparador de no máximo, é de 1.6 Volts. Esta referência é dividida por oito internamente no chip e comparada com resistores 0.05 Ohm. Em seguida Você obter uma corrente igual a duas vezes e meia a referência da tensão.
Na forma DRV8825, produzido por Pololu, O aparador é de 10 Kohm é conectado a 3.3 Volts estabilizadas. Segundo a qual a tensão de referência, com o aparador de no máximo, é de 3.3 Volts. Esta referência é dividida por cinco dentro do chip e comparada com resistores 0.1 Ohm. Em seguida Você obter uma corrente igual a duas vezes a tensão de referência.
A tensão de referência é medida por um testador com o negativo GND e o positivo no centro do aparador.
Estas são as normas vigentes que são obtidas:
| Posição de aparadores | A4988 | Drv8825 |
| No máximo | 4.0 Ampère | 6.6 Ampère |
| Três quartos | 3.0 Ampère | 4.9 Ampère |
| Um dois-terços | 2.7 Ampère | 4.4 Ampère |
| No mid- | 2.0 Ampère | 3.3 Ampère |
| Em um terceiro | 1.3 Ampère | 2.2 Ampère |
| Em um quarto | 1.0 Ampère | 1.6 Ampère |
| Zero | 0 Ampère | 0 Ampère |
ATENÇÃO: Como você pode ver, Quem desenhou estas formas perdeu completamente a escala completa. A corrente máxima suportável (mesmo com o máximo de dissipadores e ventiladores) é de 2 Amperes para 4988, e 2.2 Amperes para 8825.
A escala completa do aparador é então duas ou três vezes maior do que o que seria razoável. Com uma escala tão alta, o ajuste aparador torna-se duas ou três vezes mais difícil. Então tenha muito cuidado para nunca ir mais da metade (com o 4988) e nunca mais de um-terço (representando o 8825).
Além disso, Só para fazer o ajuste ainda mais difícil, alguns aparadores não têm nenhum fundo mecânico. Você começa a zero, o passa do outro lado e passa sem perceber, dando a corrente máxima e imediatamente salto fusíveis e drivers.
ATENÇÃO SUPER: Existem drivers com os aparadores que age ao contrário. Pelo qual, antes, confiar em seus drivers, É bom medir o ajustador de tensão. Ajustando-se ao mínimo, no sentido anti-horário, a tensão deve ser mínima (de zero volts para 100 milivolts). Ajustando o máximo, no sentido horário, deve ser a tensão máxima (De 1.5 em 3.3 Volts, dependendo do driver). Se não é preciso muito cuidado ao usar esses drivers, Lembre-se sempre aquele ato contrário (Quem fez essas PCB deve ser transferido para o departamento “limpeza de esgoto”, antes que ele faça mais estragos).
Para ajustar o aparador você pode proceder de três maneiras
MÉTODO 1 – DEVAGAR: Este método é adequado para os amantes de precisão, querendo saber o valor numérico do atual. Aplicar tensão aos condutores (até mesmo o 12 ou 24 Volts que você precisa alimentar-se internamente por 5 Volts de alguns drivers) Mas não ligue os motores. Meça a tensão entre o solo e a parte de metal do aparador. Ajustar a voltagem para obter uma corrente que é metade da corrente nominal (= duas vezes e meia a tensão, com 4988, ou 2 vezes a tensão, com o 8825). Então começar a fazer testes de cima ou para baixo, sempre medido com o medidor para cada teste. Use uma chave de fenda apropriada (melhor plástico) e muito cuidado. Claro, para todos os testes, você deve remover o poder, Desconecte e reconecte os motores de potência. Por que esse método é muito lento.
MÉTODO 2 – PARA OS ESPECIALISTAS: Definir os aparadores de olho, De acordo com a tabela atual. Em seguida de um quarto e nunca vai mais de metade (com o 4988) e nunca mais de um-terço (representando o 8825). Para determinar localização certifique-se de onde é o mínimo (Use muita luz e uma lente boa).
MÉTODO 3 – PARA OS ESPECIALISTAS: Mark a ponta do aparador (em frente ao local plano), com um pequeno sinal de Sharpie. Adquirir uma chave de fenda plástica, muita luz e óculos de proteção. Vire o aparador de cerca de um quarto, ou menos, antes de ligar. Tente o motor várias vezes, a fim de obter a máxima velocidade e o poder (Se você aumentar a corrente aumenta o torque, Mas com demasiada velocidade máxima atual diminui). Levanta-se gradualmente a velocidade, até o motor conchas e paradas, Então você tentar movê-lo várias vezes e alterar o atual para torná-lo melhor. Com um pouco’ experiência que você pode ouvir o ponto de doce, escutando o som dos motores. Os ajustes são feitos com micropassos definidas permanentemente.
Quem sabe inglês bem também ficaria bonito vídeo da Pololu Isso explica como ajustar os aparadores.
Considerações que se aplicam a todos os motoristas
Um único mestre de Theremino pode controlar até cinco motores de passo. Os dois fios vermelho e preto, Essa pista “+ 5 Volts” e “GND” o motorista primeiro, comida também pode ser continuados e outros drivers.
Ligue sempre, pelo menos o fio GND, entre o mestre e os drivers. Lembre-se também conectar “Redefinir” com “Dormir”.
ATENÇÃO: Sempre ligue um capacitor de 100 UF entre “VMOT” e “GND”. O capacitor eletrolítico deve ser, Não é o tipo “ESR baixo”, com o positivo ligado “+”, Deve estar perto do driver Módulo (se alguns centímetros). A tensão do capacitor, deve ser pelo menos 5 Mais Volt, tensão de alimentação de potência do motor.
Na ausência deste capacitor, Você pode criar tensões perigosas extra, Isso pode fazer você perder a comunicação USB, danificar os drivers e também danificar o mestre.
Neste caso em particular, para evitar fenómenos de ressonância produzidos pela alta indutância presente, Não use capacitores eletrolíticos de baixa resistência em série (ESR baixo), Mas as comunas 100 UF, com aproximadamente 1 série resistência ohm. Leia os avisos de Pololu nestas páginas:
https://www.pololu.com/docs/0J16/all
https://www.pololu.com/product/1182
Antes de ligar tudo que deve ser ligado com fiabilidade. Se se trata de um motor de fio, ou link GND, Motorista de A4988 torna-se corrompido.. Se transformando o aparador faz um curto-circuito com a chave de fenda, o motorista quebra tudo & #8217; instantânea. Em alguns casos o chip dele explode e sai para fumar. O mestre de Theremino deve suportar essas torturas, Mas é melhor não colocá-lo para o teste.
Isto não é dizer, que os drivers não são confiáveis. Se você não cometer erros, nunca quebra.
No entanto, recomendamos que ligue sempre os drivers, com conectores machos e fêmeas, para substituição rápida e fácil. Recomendamos que você compre cinco ou dez, para obter um pouco’ Commons, e derrubar o preço.
Motoristas TB6600
No eBay você pode comprar os drivers completos com foto-acopladores e muito barato. São o único driver, ou seja, você tem que usar um para cada motor..
Existem vários modelos no mercado, todos com características bastante semelhantes. Nesta página descrevemos apenas o TB6600, Mas os conselhos e padrões também se aplica a muitos outros modelos, por exemplo o TB6560 que você pode comprar na Loja-ino.
Nas próximas duas imagens que você vê na TB6600, na versão sem contêineres e.
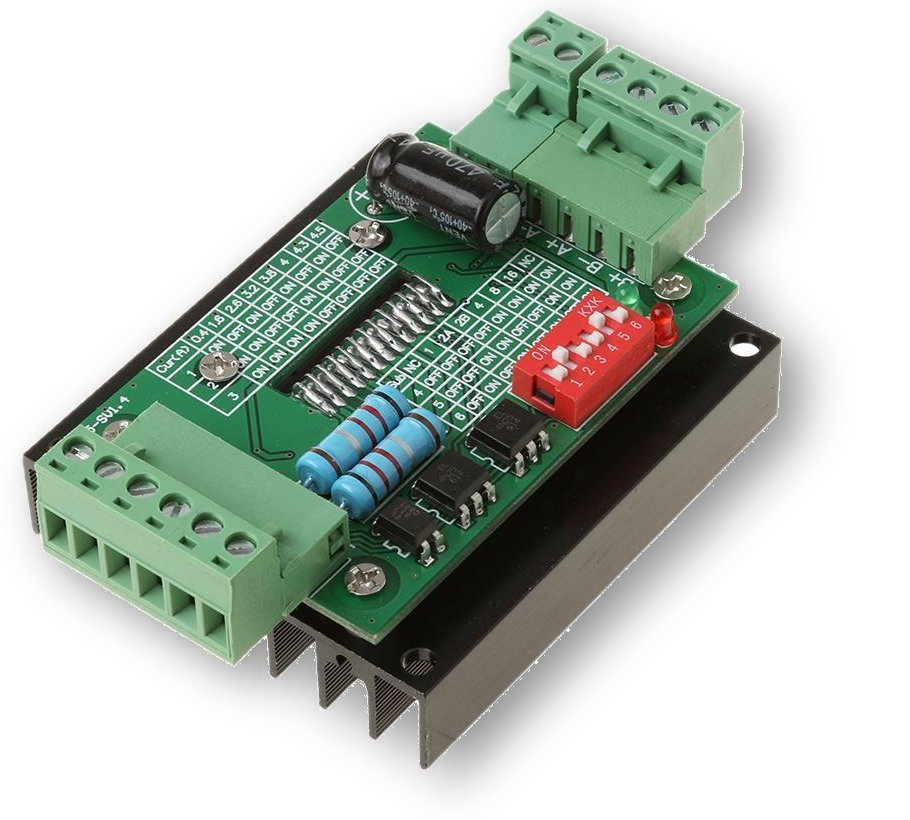

Características do driver TB6600
- Tensão de alimentação de 9 em 42 volts
- Corrente ajustável para 4 Ampère
- Proteção interna da temperatura e da sobrecarga
- Regulamento da micropassos da 1 até 32
- Photocoupled entradas com positivo compartilhado
- Entradas positivas para se conectar ao 5 volts
- As entradas devem ser conduzidas com um coletor aberto do transistor
Ligações entre o mestre módulo e drivers TB6600
Internamente os drivers TB6600 (e afins), as foto-acopladores estão ligados ao positivo através de resistores 330 Ohm. Então para pilotá-los de forma confiável, você tem que usar uma tensão positiva de 5 volts. As saídas do mestre módulo, que fornecer tensões entre zero e 3.3 volts, Não pode ser ligado diretamente a esses drivers.
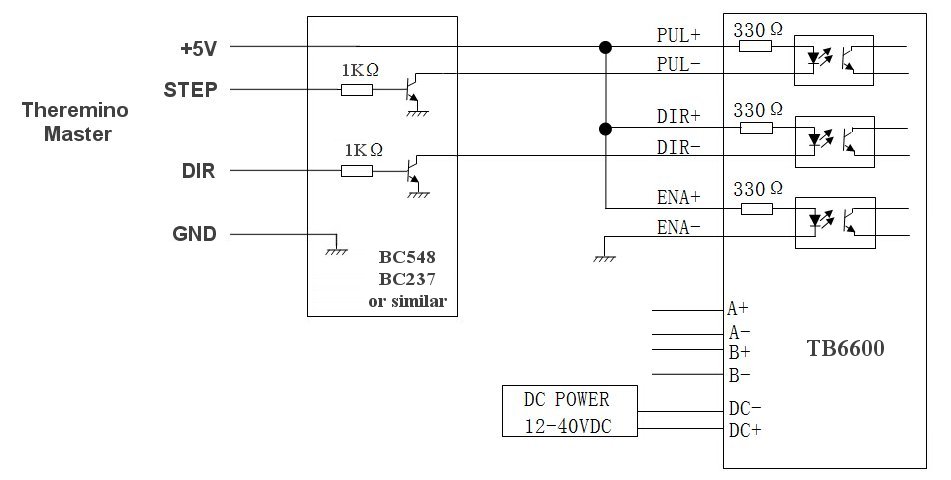
Além disso, Desde que a foto-acopladores estão ligados permanentemente ao positivo, e pilotá-los do seu contributo negativo, Segue-se que um deve levá-los com um transistor de coletor aberto. O transistor faz uma inversão de sinal, Por que você vai luz do foto-acopladores quando o sinal de saída do mestre é alto.
Alguns podem entender melhor a seguinte imagem que é mais realista (graças a Armando que enviou).
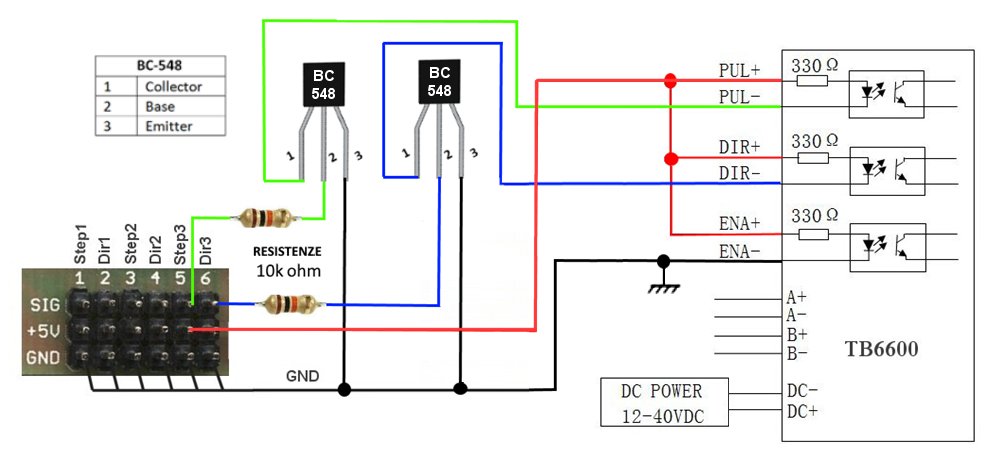
Na primeira imagem que usamos resistências de 1k, que eu sou um pouco’ baixos e desperdiçou alguns miliamperes. Como a corrente de ser conduzido é baixo você pode ser levantada até 10k. Na prática, você também pode usar qualquer resistência intermediária, por exemplo 2.2k, 4.7k o 8,2k.
Os dois transistores e as duas resistências, são adaptadores do tipo coletor aberto. Você pode construir os fios conectando-se, conforme explicado na Esta seção, ou em uma placa de circuito impresso, seguindo Este projeto.
Aparentemente esses drivers também podem funcionar ligando as saídas de insumos mestre K- e PUL-, Mas a imunidade ao ruído elétrico seria escassa e o risco de perder passos seria muito alto.
Conectar as máquinas com porta paralela

Desconecte o cabo de ignição o paralelo, você conectá-lo ao Adaptador Theremino CNC, e vamos começar a trabalhar imediatamente. Este adaptador pode ser usado para Mach3 ou LinuxCNC (com o PlugIn apropriado), Mas melhor ainda, com o aplicativo Theremino CNC, É mais fácil de usar.
https://www.theremino.com/hardware/adapters#cnc
Controles de servo
Há todos os tipos de atuadores e poder. Os servos são ideais para muitas aplicações, Ligue para qualquer pino de Theremino mestre (até 6 seus contemporâneos) ou para os pinos sobre os escravos “Servo” que pode voar até 10 cada. Você escolhe “Servo” Como tipo de pino e trabalho imediatamente. Para julgá-los, Clique na coluna apropriada valor do aplicativo HAL, e mova o mouse, manter pressionado o botão esquerdo.

O MG930 também marcou TGY930, Tem uma precisão de posicionamento pelo menos cinco vezes maior, em comparação com todos os outros modelos. Sendo digital, Tem uma corrente de partida bastante elevada e um som agudo sobre 400 Hz. Seu alcance é de aproximadamente 140 graus.

O HX5010 é muito poderoso, menos precisos do que os TGY930 mas muito barato, custos apenas 4 euros e a pena todos os. Excursão = 200 graus.

O HTX500 é muito pequeno, bastante precisos e mais barato, Claro que tem um grande poder, mas é o suficiente para muitas aplicações pequenas, Ele tem um completo 180 graus e até mesmo alguns mais.


O HXT900 e o custo de TG9e inferior 2 Euro, Eles são bons para todas as aplicações de médio porte e tem uma plena 200 graus.

O MG958 é um poder do monstro 15 Kg/cm e apenas os custos 11 Euro. Atenção que consome muita corrente e você não pode alimentá-lo com USB somente. Sua trilha: 135 graus.
Um servo muito semelhante a este é o TGY - 1501MG, Ele também de 15 Kg/cm, semelhante em tamanho e mais prontamente disponível. Nós ainda não tentamos Mas as características são Okey.
Resumo das principais características dos servos.

Estes servos foram escolhidos para o preço, a precisão e a força entre um grande número de modelos que testamos comprando-os de: www.HobbyKing.com (Tem ótimos preços e navios em um curto espaço de tempo, embora está localizado nos Estados Unidos)
É outro endereço para os servos: www.robot-Italy.com Do robô Itália não são os modelos nesta lista, Mas só muito caras e estranhas versões, inclusive de três revoluções, oito voltas e movimento contínuo. Sempre de robô-Itália, você pode encontrar os sensores, motores, garras de robóticas e muitos outros acessórios interessantes e originais.
Servos de alto desempenho

–
–
–
Este promete desempenho muito superior DS8231 TGY930, Tentei, mas é produzido por JR e você pode confiar.
http://www.jramericas.com/45190/JRPS8231/
Suas características são: Resolução bem 5900 passos na 120 gradi di rotazione DeadBand Molto bassa (o Construtor diz "inexistente") Cuscinetti Due cuscinetti spaziati per la massima precisione Pulse rate Loop di controllo da 250MHz per la massima precisione Corrente Consumo di corrente di poco superiore a un normale servo Lunghezza 39.1 largura mm 19.1 mm de altura 34.5 peso mm 49 gramas de Torque 1.26 Custo de kg/cm 70 Euros
Medir o passo e mortos-band
A precisão de medida do servo é fácil, Ponha-se no servo um adaptador de vídeo e em seguida, inserir um tubo de plástico muito rígido 25 centímetros em um dos braços da Cruz. Em seguida, cai o servo com uma pinça, rodando-o com o pino na parte superior e com o tubo paralelo à tabela que termina em um papel de gráfico de linha, Enquanto alguns milímetros acima da linha sem tocá-lo.
Finalmente se move o servo de quantidades muito pequenas, com o para cima e para baixo e podem ser contadas na linha quantos pequenos movimentos são vistos fazendo para cada milímetro, Estas são as “Passo”
Para medir a mortos-banda vai primeiro uma forma e, em seguida, ele começa a voltar com o para cima e para baixo até você vê-lo começar a voltar, o número de vezes que você pressionar a seta, com um cálculo simples, indica a largura de banda morta.
Servo de rotação e torque ilimitado com variável

Os servos têm normalmente uma rotação de aproximadamente 180 graus, Mas para alguns aplicativos seria motores de rotação ilimitada preferível. Normalmente nestes casos usando motores de passo, Mas eles têm desvantagens.
Steppers requerem um circuito condutor complexo, precisam de rampas de aceleração e desaceleração e possuem muito pouco binário. Com steppers se você acelerar muito rápido, ou excede a velocidade e o torque de crítica, Você perde a distância e então você perde l & #8217; do alinhamento entre software e hardware.
Para superar as limitações de stepper, carros mais caros usam motores em contínuo, com loops de feedback e externo para os sensores de posição do motor. Com um servo alterado temos exatamente isso, Mas sem a ponte, circuito de condução, normalmente exigidos para motores continua. Driver de ponte já existe no chip pequeno servo os mecanismos de feedback vou adicioná-los, com sensores (óptico ou magnético) e software. Nos casos mais difíceis, Graças ao poder do software PC, Você também pode adicionar um algoritmo PID.
Com uma simples mudança pode alterar o servo para fazê-los trabalhar em multiturn. O servo não modificado, o sinal de controle controla a posição do & #8217; virabrequim. Depois de mudar, o sinal controla a velocidade e o torque, na rotação dois.
Aqui está como você daqui o servo multiturn, conectado a um pino configurado como Servo_16.
| Sinal | Força e velocidade |
| 1000 | Força máxima e máxima velocidade no sentido horário |
| 750 | Meia força e velocidade no sentido horário |
| 600 | Força mínima e a velocidade no sentido horário |
| 500 | O servo fica parado |
| 400 | Força mínima e a velocidade no sentido anti-horário |
| 250 | Meia força e velocidade no sentido anti-horário |
| 0 | Força máxima e a velocidade máxima no sentido anti-horário |
Todos os servos são editáveis para operação multi redonda, Mas nós preparamos os padrões apenas para HXT900. Esses servo têm muitas vantagens, consumir pouca energia, pode ser alimentado por USB e só custou dois euros de EZRUN: HobbyKing.com _ HXT900 (Quando você ordem de EZRUN pegar algumas pilhas de 10 cabos de extensão: De 30 cm e De 60 cm)
Com o servo HXT900 a velocidade de rotação é ajustável, de alguns tiros por minuto para cerca 80 RPM, e o torque é ajustável de um mínimo (Para quando você faz um pouco de esforço) até 1.6 Kg/cm (Você não pode parar o pino, Aperte-o com os dedos).
A tabela a seguir mostra a força e velocidade que pode ser obtida um HXT900, transformando a rotação em um movimento linear com barras roscadas ou polias.
| Método |
Mm por revolução |
Velocidade máxima (mm/min) |
Força máxima (Kg) |
| Barra roscada 1 mm/Rev | 1 | 80 | 60 |
| Barra roscada 2 mm/Rev | 2 | 160 | 30 |
| Barra roscada 4 mm/Rev | 4 | 240 | 15 |
| Diâmetro da polia 3.2 mm | 10 | 800 | 6 |
| Diâmetro da polia 5 mm | 15 | 1200 | 4 |
| Diâmetro da polia 10 mm | 30 | 2400 | 2 |
| Diâmetro da polia 20 mm | 60 | 4800 | 1 |
Indicam as características de HXT900 1.6 Kg/cm. Então um HXT900, polia 20 mm de diâmetro, poderia levantar 1.6 Kg. Nesta tabela, para estar no lado seguro, Calculamos 1 Kg.
Modificar um servo HXT900


Remova as etiquetas adesivas em ambos os lados, Desapertar os quatro parafusos, Abra o servo e cortar os fios vermelhos três, Feche a placa de circuito.


Puxar o parafuso do motor, desfilando o potenciómetro de sua sede. Cortar com o cortador de metal guias, onde são soldados os fios.


Remover as duas engrenagens do eixo e terminar com a máquina de cortar todas as partes internas, Isso impede a rotação. Verifique se o eixo gira livremente.


Cortar com o cortador dois dentes que estão localizados na & chainring maior #8217;.
O potenciômetro no lugar rotunda da linha. Deslize as engrenagens, os pinos, a partir do menor. Todas as engrenagens ir com bunda grande, para o motor. L & #8217; a pedaleira, que traz o parafuso do motor, Não deve ser pressionado demais, Mas apenas para se aproximar de outras engrenagens, sem tocá-los.


L & #8217; foto à esquerda é um diagrama de fiação e funcional, da direita indica modificações a fazer e onde colocar os resistores.
Adicionar dois ou três pequenos resistores SMD (0603), conforme especificado (Clique nas imagens para ampliá-las)
Há também um HXT 900 com um circuito diferente daquele mostrado aqui. Neste arquivo existem os esquemas e todas as informações que encontramos. Infelizmente, a folha de dados é em Chinês: uploads/files/HXT900_Type2.zip
Finalmente, fechar o motor e experimentar.
Editar o servo que não sejam HXT900
É impossível fornecer instruções para todos os tipos de servo existente. Neste arquivo existem todas as informações, folha de dados e esquemas, Que coletamos até agora: uploads/files/ServoInfoAndDatasheets.zip
Empregado comercial multi redondo
Finalmente, os fabricantes descobriram essa possibilidade. O catálogo Pololu já existem quatro modelos, com preços a partir de 5 Euro para 15 Euro. O link abaixo mostra o menor, Mas, a partir deste link, e explorar todo o catálogo Pololu, e não só para os motores:
http://www.pololu.com/product/2820
Princípios de operação do servo normal e multiturn
Cada modelo de servo difere mecanicamente e eletricamente, Mas os princípios são os mesmos para todos os servo: uploads/files/ServoCircuitsAndTimings.zip
Operação do servo padrão.
- O sinal de 0.5 em 2.5 MS, é convertido para o chip de servo, em um valor que varia de 0 em três volts.
- O potenciômetro pequeno dentro do servo (Dependendo de como foi), Ele também fornece-lhe um valor de 0 em 3 Volts .
- Se as duas voltagens são iguais, a tensão do chip para o motor não.
- Como as duas voltagens, desviar-se do outro, o chip por mais e mais potência ao motor.
- A tensão do motor é dada de forma, ou na direção oposta, Dependendo se maior tensão ou o outro.
Operação multi redonda do servo.
- O potenciômetro é substituído com duas resistências fixas, simulando o potenciômetro sempre no meio da sua corrida.
- O resto é exatamente como o servo normal.
- Se o sinal de comando é metade (1.5 MS), Então as duas voltagens são equivalentes e o chip não fornecer energia ao motor.
- Como as duas voltagens, desviar-se do outro, o chip por mais e mais potência ao motor, uma maneira ou outra.
Quanta energia enviada para motor?
- O chip dentro do servo atua como um componente de"reação".
- A reação ocorre em servo de circuito fechado para "normal" ou "feedback".
- Em multi rodado servo é uma reação simples ou "lug".
- Em ambos os casos, há uma curva de reação.
- Curva de resposta, Dependendo do sinal de controle (desvio entre as duas tensões), determina a tensão do motor.
- Curva de resposta é uma espécie de "S" com uma feia aqui no centro.
- A inclinação da curva (força de reação) é regulada por um resistor.
- Os centro deformados (zona morta) é ajustado usando um segundo resistor, que determina sua largura.
- Teoricamente, seria melhor ter um monte de reação e curta zona morta, Mas você não pode exagerar.
- Se você exagerar os parâmetros de reação, o motor é mais firme e pode até começar a balançar violentamente.

Servos motores sem escova


Existem motores com ou sem escovas, de todos os tipos, a partir de alguns gramas de peso até sobre 10 Potência KW
No catálogo: www.HobbyKing.com você pode encontrar motores com ótimos preços e controlador para pilotá-los com correntes até 300 amplificadores com sinais padrão do sistema Theremino.
Com cada um “Escravo” do tipo “Servo” Você pode controlar até dez motores independentes.
A fotos mostram um 6 Kilowatt (125 Ampere em 48 Volts) e um controlador pequeno para motores sem escova.
Alguns dos exemplos mais interessantes de mecanismos selecionados
O catálogo EZRUN mudou.. Nós tinha selecionado motores mudaram ligações e isso para nós é um problema, porque se nós publicamos links quebrados candidatos a emprego penalizar.
Além do catálogo EZRUN tornou-se mais difícil de ver, Por que não posso pedir motores para poder. Então, o melhor que podemos fazer é apontar a primeira página dos motores Outrunner, classificados por tamanho:
https://hobbyking.com/en_us/electric-motors-1/size.html
Exemplos de controladores para motores
Controlador de 6 Amp. para os motores sem escova (SEM ESCOVA) – sobre 6 Eurohttp://www.hobbyking.com/hobbyking/store/__4318__TURNIGY_Plush_6A_8bec_6g_Speed_Controller.html
Controlador de 25 Amp. para os motores sem escova (SEM ESCOVA) – sobre 8 Euro
http://www.hobbyking.com/hobbyking/store/__11616__Turnigy_AE_25A_Brushless_ESC.html
Controlador de 20 Amplificadores para motores com escovas (ESCOVADO) – sobre 3 Euro
http://www.hobbyking.com/hobbyking/store/__9090__Turnigy_20A_BRUSHED_ESC.html
Controlador de 30 Amplificadores para motores com escovas (ESCOVADO) – sobre 6 Euro
http://www.hobbyking.com/hobbyking/store/__6468__Turnigy_30A_BRUSHED_ESC.html
Motores no catálogo Pololu
Recomenda-se começar com este link, e explorar todo o catálogo Pololu, e não só para os motores. De Pololu tudo para DIY.
http://www.pololu.com/category/22/Motors-and-Gearboxes
Motores no catálogo Solarbotics
Também aqui são os motores (e outros componentes úteis para os fabricantes). Custo mais, Mas vale uma olhada cada agora e então, mesmo neste catálogo:
https://solarbotics.com/product/gm2/
https://solarbotics.com/catalog/motors-servos/gear-motors/
ATENÇÃO: Links para empresas comerciais pode sugerir uma publicidade oculta, para isso, você deve especificá-lo: Ninguém está pagando e nunca trocaram um único e-mail com qualquer uma das empresas listadas aqui. Então somos livres para falar sobre o bem e o mal que ninguém e nosso “Dicas de compras”, Eles são apenas úteis informações, obtidos durante a pesquisa de componentes.
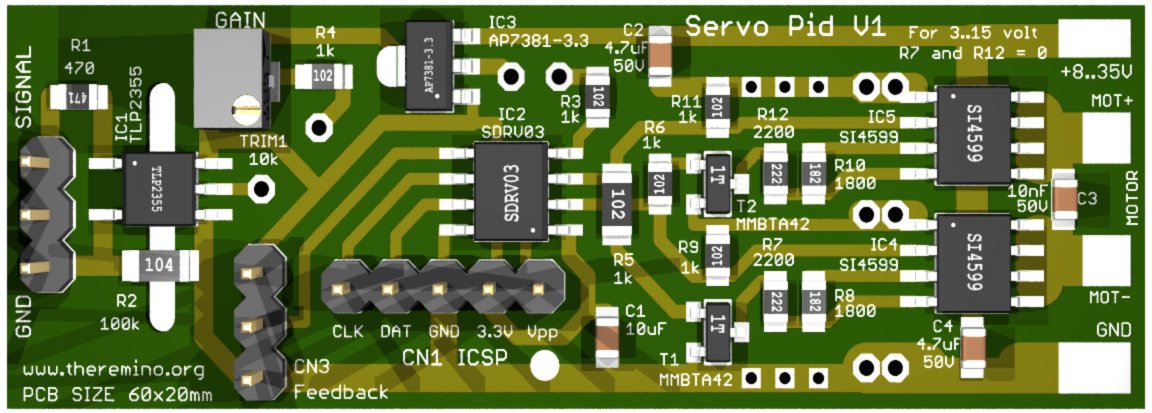
ServoPID
Este módulo é um H-ponte que pode controlar os motores de corrente contínua até cinquenta watts (até alguns amplificadores e mais de trinta volts) e transformá-los nos servomotores.
Agradecemos ao fabricante e vendedor de eBay MaxTheremino, que foi prontamente preparado placas de circuito impresso e kits para este projecto. Siga de ligação MaxTheremino no eBay e se ele tinha deles ainda escrever-lhe catalogar a tê-los enviado.
Aqueles que preferem comprar apenas os componentes e imprimir as técnicas PCB DIY, Ele será localizado no arquivo compactado todos os arquivos necessários para construir este módulo.
placas de circuito em formato de águia, imagens, simulações LTSpice e esquemas:
ServoPID_V1.zip
O sinal de controlo pode ser um sinal clássico “Servo” ou “PWM”, que pode vir de um módulo Mestre, por um IotModule, por um netmodul para, ou mesmo a partir de um controle remoto para aeromodelos.
A ponte-H é controlada por um micro-controlador PIC, Programável com o firmware, que preparamos para diversas necessidades. No caso mais simples você estiver executando um motor para a frente ou para trás, ajustando a velocidade. Em casos mais elaborados usando um potenciômetro para medir a posição e ajusta a posição com um algoritmo PID.
Com o potenciômetro e o PID tem a mesma operação dos clássicos “Servo” Mas, Ao contrário Servo comercial, você tem a possibilidade de variar cada parâmetro, área Morta, resolução de medição da ADC e os coeficientes PID.
servo-sinal de entrada normal, ao contrário é isolado com um opto-acoplador. Isto permite manter totalmente separar a massa do circuito de alimentação do motor da do PC controle. Isto irá eliminar radicalmente interferência eléctrica que poderia causar mau funcionamento.
LIGAÇÃO
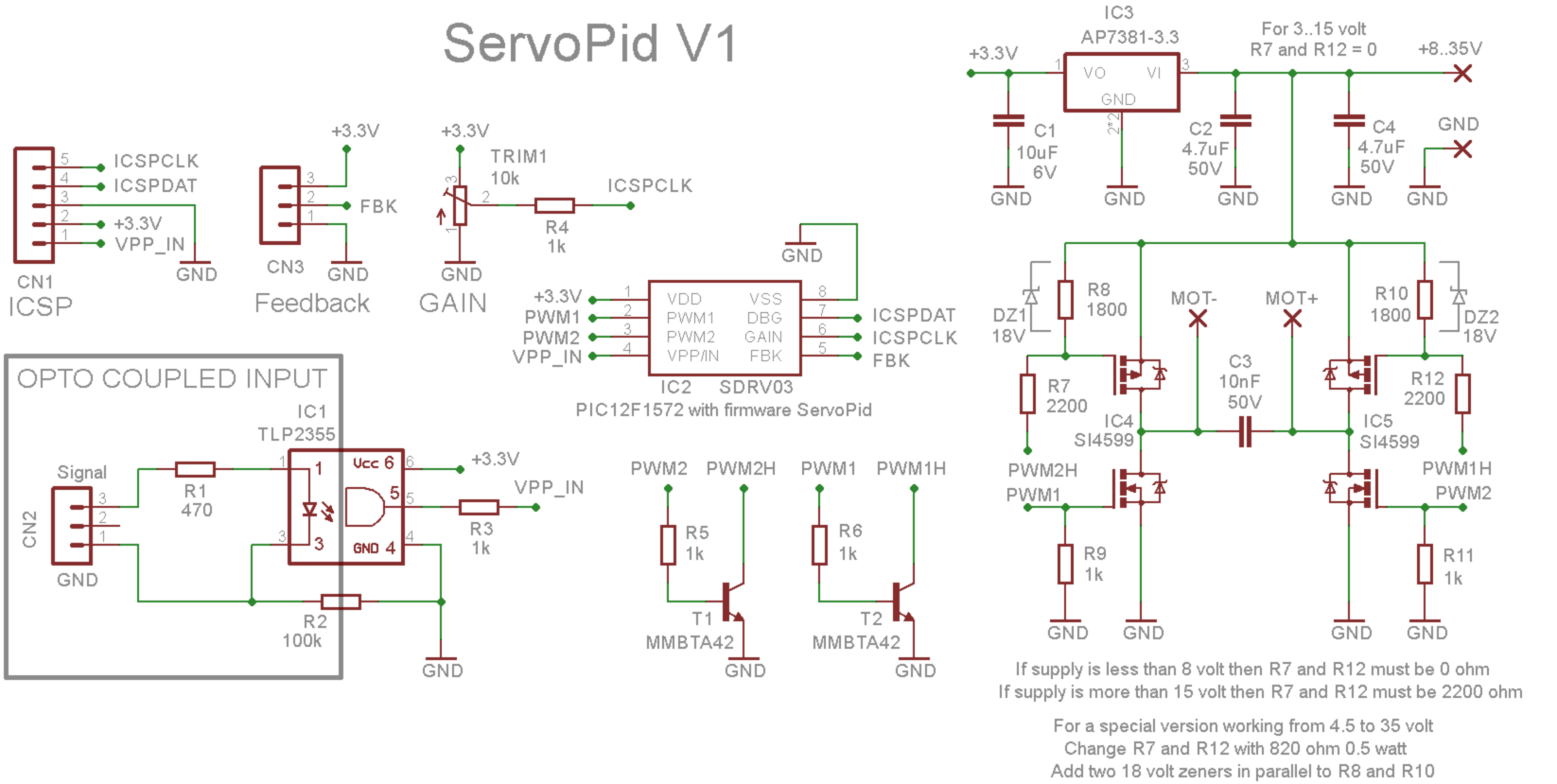
O sinal de controlo, Tipo de servo ou Pwm, Ele está ligado ao conector CN2, através de R1 que limita a corrente de alguns miliamperes e piloto do LED da foto-acoplador.
A amplitude do sinal de controlo deve ser de 3 em 6 Volts, o tempo de impulsos positiva deve estar entre 500 em 2500 nos (sobre), e a taxa de repetição de 50 Hz até 500 Hz.
O sinal de controle continua através do IC1 foto-acoplador, através R3 e chega ao pino 4 do micro, que mede o tempo com alta resolução (trinta segundos de microssegundo).
O conector “ICSP” Ele é usado para programar o PIC com o firmware de controle e também para ligar um conversor serial USB para depurar. Consulte a próxima seção “FIRMWARE”.
Se você configurar o firmware usando o PID, em seguida, o conector “Comentários” Deve ser ligado a um potenciómetro de medição posição. Normalmente este potenciômetro está rigidamente acoplado ao eixo de saída, que é movido pelo veio de accionamento por meio de uma engrenagem de redução ou correia. O potenciômetro de retorno também pode ser multiturn e deve ser um potenciômetro linear, com os valores normalmente entre 1 k e ohm 10 k ohm. A central do potenciómetro deve ser ligado ao conector centro, o fio no diagrama tem o nome FBK.
No caso em que o feedback acontece ao contrário, você pode trocar as duas conexões laterais do potenciômetro entre eles. Mas tome cuidado para que o centro deve estar sempre ligado ao FBK. Se você deixar o potenciômetro pode ser aquecido e danificado.
-lo trimmer “GANHO”, Ele serve para ajustar manualmente o ganho do PID, ele usa apenas com algumas configurações de firmware e, principalmente, durante os testes de um novo motor, para afinar os valores de PID. O resistor R4 desacopla o aparador de sinal ICSPCLK, assim você pode usar o sinal ICSPCLK para depurar com série.
O regulador de tensão “IC3” cria uma tensão de 3.3 Volt muito estável. Esta tensão alimenta o micro-controlador, realimentação do potenciômetro, Qtr1 o aparador eo IC1 optoacoplador.
Os dois sinais de saída do PIC, com nome e PWM1 PWM2, Fly formado pelos quatro MOSFET contido no chip de SI4599. A ponte é fechada com uma frequência elevada do sinal de PWM (Normalmente 16 ou 32 KHz), que regula a velocidade do motor e faz com que ele rode numa direcção ou outra. Durante as comutações o PIC assegura que os dois ramos da ponte nunca são simultaneamente fechados (que curto-circuito na fonte de alimentação).
A tensão de alimentação tem de ser adaptado para o motor, se é demasiado o motor pode queimar. Se você não fazer alterações no esquema pode ser usado para tensões de alimentação de 8 em 35 Volts. O diagrama mostra as modificações que ser feito para permitir que a outra faixa de fornecimento de energia dois. A primeira faixa (De 3 em 15 Volts) Ele requer apenas a curto R7 e R12. O segundo intervalo (De 4.5 em 35 Volts) Ele requer a substituição R7 e R12 e também para adicionar dois diodos Zener 18 Volts.
FIRMWARE
No conector ICSP ligar um programador PICKit2 (Ver Esta página). Note que o PK2DeviceFile.dat arquivo, que também inclui o PIC12F1572 utilizado neste projeto, É válido apenas para PICKit2. Então, muito provavelmente com PicKit3 não ser capaz de programar este PIC (ou pelo menos não sabemos como mostrar-lhe).
No ZIP você baixar no final desta seção você vai encontrar o arquivo ServoPid35.hex já concluído e pronto para ser escrito no PIC com PICKit2.
Este arquivo é o mais simples de controle de versão. Ao variar o sinal de controlo de mínimo a máximo move o motor de velocidade variável nos dois sentidos. Com o sinal de controlo numa posição central, o motor pára.
ENVIO DE DEBUG DADOS DO FIRMWARE SERIAL
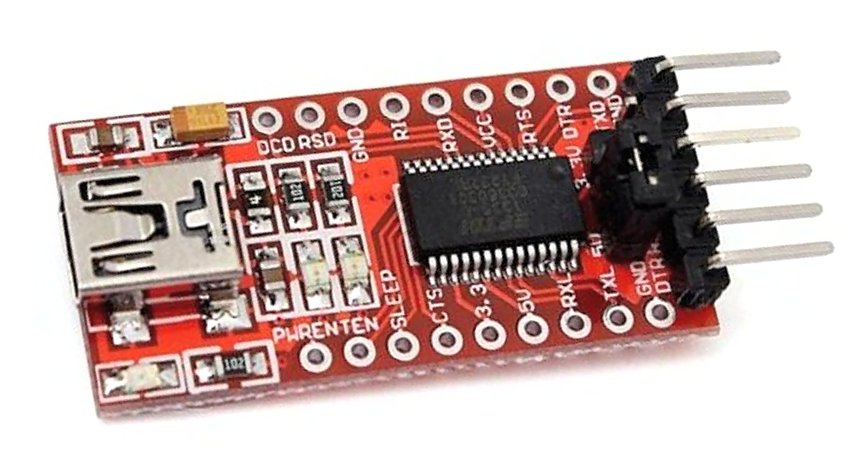
O fio ICSPCLK o conector ICSP também é utilizado para enviar dados de depuração a partir do firmware para a linha série. Para usá-lo você tem que ligar GND e ICSPCLK para GND e RX pino de um conversor Serial-USB, como o que é visto nesta imagem.
Em seguida, você alterar o firmware para enviar valores para a depuração de série, a recepção de dados com o pedido Terminal e, opcionalmente, exibindo-os com o SignalScope ou outras aplicações de nosso sistema.
EDIT e recompilar o FIRMWARE
Para modificar os parâmetros de funcionamento e implementar o mais controle de versão complexa (controle de posição com feedback e PID) você deve editar o arquivo ServoPid35.bas e recompilação. A compilação cria um arquivo HEX que ele pode ser escrito no PIC com PICKit2.
Para editar o arquivo recomendamos o uso do excelente FineLineIDE e para compilar o ProtonCompiler.
Ambos estão livres e você pode baixá-los a partir dos seguintes links:
www.protonbasic.co.uk/content.php/2077-FineLineIDE
www.protonbasic.co.uk/vbdownloads
As instruções e comentários úteis para modificar o firmware pode ser encontrada no arquivo ServoPid35.bas e no final do arquivo que você vai encontrar um glossário de termos utilizados e instruções passo a passo para ajustar os parâmetros PID.
Mente-lhe este é um firmware complexo e não vai ser fácil de aprender e usar de forma adequada todas as suas opções. A parte mais difícil é definitivamente ajustar os parâmetros PID, a fim de oscilação evitar e, ao mesmo tempo, obter uma resposta rápida e menor pode área die.
Nós fizemos o nosso melhor para facilitar o ajuste dos parâmetros PID, utilizando o método de Ziegler-Nichols e simplificá-lo ainda mais. Nós também corrigiu alguns erros do método Ziegler-Nichols publicados na Wikipedia, mas a definição dos parâmetros para um novo sistema (motor, reduções e feedback), Resta uma operação por especialistas.
Notas para o firmware
Para diminuir a dissipação nos MOSFETs, é aconselhável definir uma frequência mais baixa para o PWM no firmware. Normalmente, a frequência é definida para 20 KHz, mas em algumas aplicações nós o reduzimos para 2 KHz reduzindo o problema de aquecimento dos MOSFETs para praticamente zero.
A única contra-indicação é o ruído que aumentará um pouco. Portanto, tente diminuir a frequência PWM e, em seguida, verifique com seu motor se o aumento de ruído é tolerável.
Baixar arquivos FIRMWARE
A seguir você encontrar arquivos zip:
– ServoPid35.hex pronto para programar o PIC em malha aberta versão simples.
– ServoPid35.bas para editar e recompilar com FineLine IDE
ServoPid_Firmware.zip