
Theremino IVDN
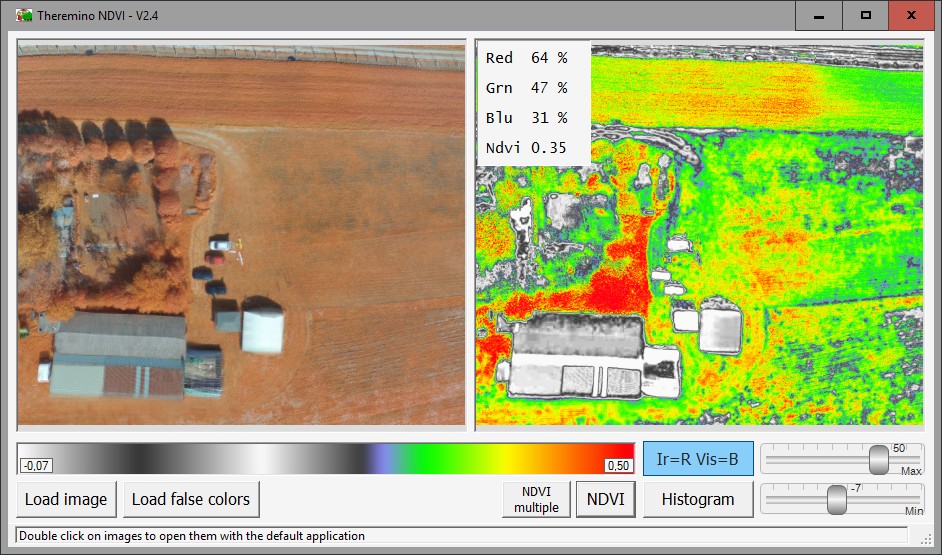 Imagens IVDN (Índice de vegetação de diferença normalizada), mostrar a saúde da vegetação em uma escala de falsa-cor. Vegetação saudável reflete mais vegetação seca infravermelha ou para o mal. Por que você usa uma câmera modificada e então você processar imagens com o aplicativo Theremino NDVI.
Imagens IVDN (Índice de vegetação de diferença normalizada), mostrar a saúde da vegetação em uma escala de falsa-cor. Vegetação saudável reflete mais vegetação seca infravermelha ou para o mal. Por que você usa uma câmera modificada e então você processar imagens com o aplicativo Theremino NDVI.
Existem também aplicações comerciais que realizam essa conversão, Mas eles são caros e complexos. Alternativamente, você poderia usar Infragram, Mas só é utilizável na Web e inflexível.
Modificar uma câmera
Algumas câmeras são mais adequadas do que os outros, Mas normalmente cabem todas as câmeras digitais de negócios. A tarefa mais difícil é remover o filtro de infravermelho, localizado no interior da lente. Em seguida, você adicionar um filtro azul na frente da câmera, ou no interior, e acabou-se a transformação.
Eu normalmente uso um filtro azul que permite até infravermelho e você obter imagens que contêm infravermelho e azul. Infravermelho são armazenados no canal vermelho, o azul no canal azul e o verde não é usado..
De acordo com nossos testes, um bom filtro é na “Rosco noite azul #74”, Isso é uma geleia de filtro mais barato e tem uma boa resposta. Mas há muitos outros filtros, Alguns até muito caro. Alguns autores preferem filtros vermelhos.
Os detalhes dessas mudanças são discutidos em muitos artigos na Internet. Pesquisa “Sala de IVDN”, “Filtros de Infrablue”, “Rosco infravermelho”, “Filtros de IVDN” etc…
Os links a seguir são alguns exemplos, entre os muitos sites em câmeras
http://diydrones.com/profiles/blogs/photosynthesis-assessments
http://www.instructables.com/id/Turn-a-Canon-camera-into-a-Plant-Health-Analyzer-u
https://publiclab.org/notes/cfastie/04-26-2014/mobius-ndvi
São sites que falam sobre filtros
https://www.rosco.com/filters/supergel.cfm
http://purposefulscience.blogspot.it/2014/09/comparing-rosco-infrablue-filters-2007.html
https://publiclab.org/notes/nedhorning/10-30-2013/red-vs-blue-filters-for-ndvi
https://publiclab.org/notes/nedhorning/11-01-2013/why-a-red-filter-should-work-well-for-ndvi
E neste site você pode encontrar muitas informações úteis sobre drones:
https://hobbyhelp.com/drones
Características de Theremino IVDN
- Com os controles de Min e Max, adapta-se a operação em condições de iluminação não ideal ou até mesmo para imagens com balanço de branco incorreto.
- A função “Histograma” ajuda você a encontrar a melhor configuração.
- Clicando duas vezes no histograma automaticamente ajustar o Min e Max.
- Clicando duas vezes sobre as imagens que você envia para o programa de imagem padrão.
- Com botão “Vários IVDN” Você pode processar todas as imagens em uma pasta e suas subpastas.
- Com o botão de cor, você pode usar ambos os filtros azuis clássicos, Filtros vermelhos.
- Escolher entre uma dúzia escalas de cor falsa, Você pode realçar as melhores características da vegetação.
- Você pode criar novas imagens de falso-cor com qualquer programa de edição (tal como a pintura). Imagens de falsa-cor devem estar na pasta “FalseColors_Scales” e normalmente eles são PNG de 256 x 32 pixéis (Theremino NDVI aceita-los em outros formatos).
Notas para as versões
Versão 1.5: Primeira versão publicada.
Versão 1.6: Corrigido um erro na conversão de IVDN com a largura da imagem que não seja um múltiplo de quatro. Corrigir o TrackBar trabalhar mesmo com o novo mouse, com roda micrométrica (sem tiros).
Versão 2.4: Adicionado de histograma e muitas outras funções. Leia o “Características” acima.
Versão 2.5: Agora, as imagens são convertidas em 24 bit com tamanho horizontal não é um múltiplo de 4.
Baixar Theremino IVDN – Versão 2.5
2.5 Theremino_NDVI_V
2.4 Theremino_NDVI_V _WithSources (projeto completo para programadores)
Versão para todas as janelas em 32 e 64 pouco. Para Pi framboesa, Linux, Android e OSX, ler o notas de instalação.
Theremino piloto Log (Piloto de UAV Log)
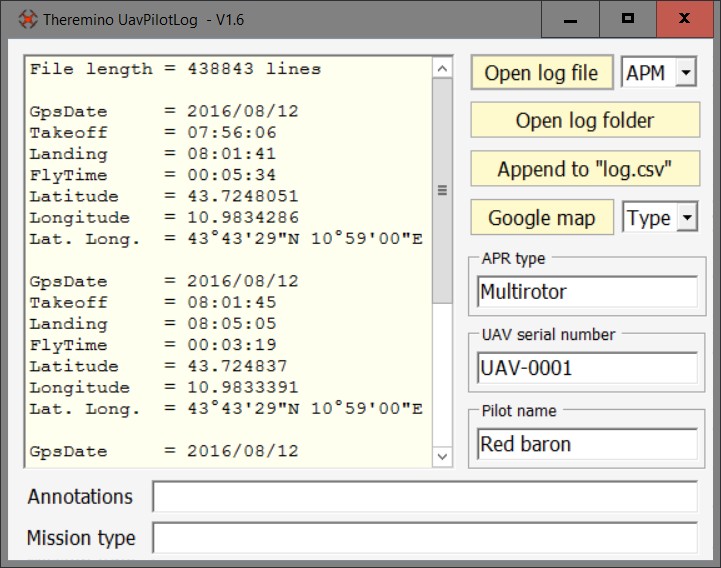
Logs de UAV (Veículos aéreos não tripulados) são longa ou complexa.. Esses arquivos são produzidos pela Software de código aberto DroneCode ou outro software comercial. Algumas linhas de log, espalhados entre milhares de outras informações, conter os dados que o motorista profissional deve copiar em seu “Diário de bordo” Após cada voo. Fazer isso manualmente é difícil e lento porque alguns dos dados é codificado e quase impossível de ler para um ser humano.
Com o aplicativo Theremino UavPilotLog atualizar o piloto pessoal de Loogbook se torna uma operação rápida e simples.
São os dados extraídos e adicionados para o pessoal do diário de bordo:
- Dia e mês do ano
- Tipo de UAV
- Número de série
- Coordenadas de decolagem
- Hora de partida
- Coordenadas de pouso
- Tempo de desembarque
- Nome do piloto
- Anotações
- Tipo de missão
- Minutos e segundos de voo
Se o Log contém mais voos são adicionados várias linhas ao diário de bordo.
Mapas
Com um clique do mouse, você também pode ver a localização no Google Maps ou Google Earth. Se o Log contém mais voos, que você pode escolher as coordenadas, clicando com o mouse sobre as linhas de Latitude e Longitude de cada voo.


Versões e downloads
Notas para as versões
Versão 1.6: Primeira versão publicada.
Baixar Theremino UavPilotLog – Versão 1.6
1.6 Theremino_UavPilotLog_V
Theremino_UavPilotLog_V 1.6 _WithSources (projeto completo para programadores)
Versão para todas as janelas em 32 e 64 pouco. Para Pi framboesa, Linux, Android e OSX, ler o notas de instalação.