
Stappenmotoren (Stepper)

AANDACHT: Om het Pin type Stepper, Stepper_Dir en Pwm_Fast moet u ten minste de Versie 5.0 de HAL, en de vorm Theremino Master moet worden bijgewerkt met de ingebouwde programmatuur 3.2 of hoger.
Als u wilt weten welke ingebouwde programmatuur hebt gewoon gebruik maken van de meest recente HAL, verbinding maken met de Master en tellen de pinnen. De originele ingebouwde programmatuur had slechts zes pinnen, vanaf versie 3.2 zij 10 en sinds versie 4 zij 12.
De nieuwste firmware (4.0) Toevoegen zes nieuwe Master Pin (passerende 6 Aan spelden 12 PIN). Daarom, met elke Master module, U kunt, van drie motoren plus zes generieke pin maximaal vijf engines, plus twee generieke pin. Desgewenst kunt u meerdere modellen en slaven.
Stepper controle functies met firmware Theremino:
- Ultra beheer-eenvoudige thereminico stijl.
- De software moet slechts één gegeven verzenden, de bestemming in millimeter (Opmerking 1)
- Nuttige werkbereik van -10 in +10 Km (kilometer) (met stappen voor mm = 200)
- Beheren van maximaal vijf assen CNC-machines.
- RepRap type machines beheer tot zes motoren (x, y, z, Volgens z gantry en twee extruders). U kunt vervolgens het extruderen van twee kleuren.
- Bovendien 65 De maximale frequentie kHz op alle vijf motoren tegelijk (Opmerking 2)
- Jitter van minder dan 20 nano-seconden (Opmerking 3)
- Instelbare maximale snelheid (Van 1 in 18000 mm/min) (Opmerking 4)
- Instelbare maximale acceleratie (Van 5 in 1000 mm/s/s) (Opmerking 4)
- Audit rapporteert het bereikte standpunt, in millimeters, voor elke as (Opmerking 5)
- Mogelijkheid van het gebruik van onafhankelijke of gecoördineerde assen in 2D en 3D (Opmerking 6)
- Met coördineren assen in 2D of 3D, Schrijven van toepassingen naar besturingselement gemaakt gemakkelijk. U hoeft niet te berekenen versnelling en snelheid. U kunt eenvoudig doel opdrachten verzenden, in millimeters. (Opmerking 7)
- Pulsen met automatische breedte. Werking wordt vereenvoudigd en niet het risico van verlies van de stap, veroorzaakt door een onjuiste instelling van deze parameter. U kunt foto-couplers lenzen, Als u de maximum snelheid beperkt (Opmerking 8)
- Automatische polariteit. Bewerking wordt vereenvoudigd en vermijd je stap verlies, veroorzaakt door onjuiste instelling van deze parameter (Opmerking 9)
(Opmerking 3) Als vergelijking: Mach3 heeft een Jitter 500 keer groter (Van 2 in 15 ons afhankelijk van de PC). Hebben een zeer lage Jitter, kunt u werken op maximale snelheid zonder het risico van verliezen stappen. Timing gebreken dan Mach3 zijn goed uitgelegd in dit artikel.
(Opmerking 4) De firmware beschermt de motor van elke fout. Als uw PC niet meer reageert voor enige tijd, de firmware komt langzaam, zonder verlies van stappen. Hetzelfde geldt als de gegevens met onregelmatige timing is verzonden of fouten bevatten.
(Opmerking 5) De software kan lezen de ontbrekende afstand, elke milliseconde, voor elke as en met hoge precisie (Fractie van een duizendste van een millimeter). U hoeft niet om deze informatie te gebruiken, maar sommige toepassingen kunnen vinden het zeer comfortabel. Nuttig kunnen zijn voor diagnostische doeleinden, of voor algoritmen die moet voldoen aan een opgegeven tolerantie. Met deze informatie kan de software werken met gesloten lus en altijd op maximale snelheid. Voortdurend controleren afstand van elke motor door het doel, de software kan vertragen precies wanneer u het nodig hebt, zonder het doen van complexe berekeningen van snelheid, trajecten en versnellingen.
(Opmerking 6) In versie 5.0 de HAL as coördinatie is niet compleet. Belangrijke toepassingen zorgen voor zichzelf, We zijn daarom gericht op de CNC Theremino toepassing, en pas nadat wij klaar zijn met de coördinatie van assen.
(Opmerking 7) De tussenliggende bestemmingen worden gereset, tot 500-1000 keer per seconde. De beste route, wordt continu herberekend. Het algoritme van de Vermogenssturing rekening wordt gehouden met, de werkelijke positie vanaf elke motor en maximale versnelling die kan weerstaan. Hoewel de toepassing CNC verkeerd pad berekent, u vermijden in ieder geval om te verliezen stappen.
(Opmerking 8) Meestal moet u de breedte van de pulsen (met Mach3 van 1 in 15 ons). Dit is een slecht begrepen en veel gebruikers regelen het willekeurig. Gebruik breed pulsen kunt plaatsen elektronische apparaten lenzen, Als sommige foto-couplers (bijvoorbeeld de goedkope 4N25, 4N26 en 4N27). Maar baggy impulsen beperken de maximale bruikbare. Theremino regel ditmaal 50 ons (zodat u kunt gebruiken traag elektronica voor langzamere machines), maar vermindert het automatisch als u hoge snelheden en hoge waarden van uitvoeringen gebruiken. Tot een minimum van 7.7 ons, Bij het gebruik van de maximale frequentie (65.535 KHz).
(Opmerking 9) Met andere puls generatoren (zoals Mach3) u hoeft op te geven van de polariteit van de pols. Om het moet u weten als het stuurprogramma op de stijgende rand of afkomst fungeert. Deze informatie is niet altijd beschikbaar en als je het verkeerd verlies sporadisch gebeuren kan stap, zeer moeilijk te herkennen. Theoretisch met behulp van de verkeerde voorzijde moet niet veroorzaken geen problemen, omdat aan elke stijgende rand, noodzakelijkerwijs volgt een dalende rand. Maar, Als het teken richting wordt bijgewerkt op het verkeerde moment, stappen kan verliezen, of extra stappen uitvoeren. De firmware van de meester van de Theremino bepaalt de richting teken met zorg. Het signaal kan ook worden gebruikt om stuurprogramma's station (een minderheid) acteren op dalende rand. Elimineren van deze aanpassing, het gebruik is gemakkelijker en elimineert het risico van verlies van stappen.
Het Pin type Stepper instellen in toepassing HAL
Elke stappenmotor moet twee fysieke Pin, één stap en één voor het beheer. De microcontroller zou plaats de Pin aan plezier, maar we besloten te beperken verwarring, door op te geven van vooringestelde posities, voor Pin-type Stepper en Stepper_Dir.
Het Pin type Stepper bij het lezen van een waarde, dat is gewoon de bestemming in mm. Eenvoudige toepassingen, een bestemming ver weg kunt opgeven, en laat het doen van alle de firmware. Meest veeleisende toepassingen, kan berekenen hun eigen pad en verzenden van tussenliggende bestemmingen die zijn frequente. Met deze techniek, een toepassing kan de snelheid controleren (diervoeders), en juist het pad bepalen, zelfs in meerdere dimensies. Gewoon om vloeiende bewegingen 20 bestemmingen per seconde (tot 50 voor de meest veeleisende toepassingen).
Een as omkeren:
Om de richting van beweging van een as omkeren, Zij wisselen de waarden “1000” en “0”, van dozen “1000 betekent mm” en “0 betekent mm”.
Specifieke parameters van de Pin type Stepper:
Max snelheid – Dit is de snelste snelheid, in millimeter per minuut. De firmware controleert continu de bestemmingen verzonden door software. Als de software vraagt te veel voor de motor, de firmware beperkt zijn snelheid, om te voorkomen dat verliezen stappen. Verhoog deze waarde totdat u ziet dat de motor stappen zullen verliezen (Het maakt een hoge doordringende geluid en stopt) en vervolgens verkleinen door een 20..50%, terug te keren naar een veilig gebied. Herhaling van de proeven onder belasting, of door het remmen van de motor handmatig, dus zorg ervoor dat u enige ruimte.
Max Acc – Dit is de maximale versnelling (en vertraging), in millimeter per minuut. De firmware controleert continu de bestemmingen verzonden door software. Als de software vraagt te veel voor de motor, de firmware beperkt zijn versnelling, om te voorkomen dat verliezen stappen. Verhoog deze waarde totdat u ziet dat de motor stappen tijdens koerswijzigingen verliezen zullen (Het maakt een hoge doordringende geluid en stopt) en vervolgens verkleinen door een 20..50%, terug te keren naar een veilig gebied. Herhaling van de proeven onder belasting, of door het remmen van de motor handmatig, dus zorg ervoor dat u enige ruimte.
Stappen voor mm – Hier heb je om in te stellen van de stap, de motor is in een spin, vermenigvuldigd met de uitvoeringen, instellen in de controller, en verdeeld in millimeter, geproduceerd door een rotatie van de motor. Als elke spin, produceert een millimeter van verkeer, en de motor is een 200 stappen per revolutie, en geen gebruik maken van de uitvoeringen, Vervolgens stelt u de waarde: 200 (stappen per revolutie) x 1 (uitvoeringen) / 1 (mm per omwenteling) = 200. Als zestien uitvoeringen gebruikt instellen u vervolgens de waarde: 200 (stappen per revolutie) x 16 (uitvoeringen) / 1 (mm per omwenteling) = 3200.
Gekoppeld aan eerdere – Door dit selectievakje in te schakelen, de motor is verbonden met de vorige, en maakt daarom deel uit van een pool, uitvoeren van 2D-tweens, 3D, 4D of 5 d. Zonder deze interpolatie, de motor moet doen minder weg, vroeg aankomen en vervolgens het pad, zou een gebroken lijn, samengesteld uit twee of meer segmenten. Doordat de interpolatie, de snelheid van alle motoren wordt gecoördineerd, zodat het werkelijke traject, is een rechte lijn. Profiteren van deze coördinatie, de controle-software kunt, in sommige gevallen, aanzienlijk vereenvoudigen (in de huidige versie van HAL is as coördinatie niet geïmplementeerd, de einddatum in de komende releases)
VBO update 2015: Deze optie is misschien niet zo belangrijk, Als we dachten aan het begin dat. We zullen waarschijnlijk eindigen voordat andere meer dringende projecten. Mogelijk schrijf ons, Als u urgent nood.
Het Pin type Stepper_Dir hebben geen parameters aan te passen. Ik ben gewoon een tijdelijke aanduiding voor de fysieke output Pin, tot vaststelling van de richting van de motor. Het is niet nodig de waarde gebruiken, dat deze pinnen zijn schrijven in de sleuf, maar sommige toepassingen kunnen het nuttig vinden. De waarde die is geschreven in de sleuf, is de afstand tot de bestemming, in millimeters (en maar liefst fracties van een duizendste van een millimeter). Deze informatie kan worden gebruikt voor diagnostische doeleinden, of voor algoritmen die moet voldoen aan een opgegeven tolerantie. Met deze informatie kan de software werken met gesloten lus en altijd op maximale snelheid. Voortdurend controleren afstand van elke motor door het doel, de software kan vertragen precies wanneer u het nodig hebt, zonder het doen van complexe berekeningen van snelheid, trajecten en versnellingen.
Bekijk de details van de Pin

PIN details weergeven de acceleratie en topsnelheid in Hz (stappen per seconde). Deze waarden zijn nuttig voor ontwerp elektronica, Tijdens het testen en om te bepalen hoeveel micro-stap gebruik. In sommige gevallen, Op annuleerteken zitten nuttig om te weten het ruwe doel (in stappen), in plaats van bestemming in mm.
In toepassing HAL, Tweevoudig tikken voort naar de lijn van de Pin (Stepper type). In het tweede venster, aan de onderkant, u leest de details van de geselecteerde Pin. Klik op de afbeelding voor een grotere weergave.
Video toont de nauwkeurigheid van impulsen geproduceerd door de kapitein module, dan Mach3


Video's op YouTube:
http://www.youtube.com/embed/CeC5WD4866o?fs=1&rel=0&loop=1&hd=1&autoplay=1
In deze video zien we de slagzij na verloop van tijd, de periode tussen een impuls en de daaropvolgende. De omvang van de twee video's is hetzelfde, 100 NS voor plein. De Master Theremino produceert pulsen, met een slip van enige 20 nano-seconden. In plaats daarvan overschrijdt Mach3 voortdurend 2 micro seconden en in de slechtste momenten te komen 10 micro seconden. Als u naar reist 25 KHz, slagzij van Theremino Master is alleen de 0.05%, Terwijl de Mach3 is gelijk aan 25%. Wanneer u groter is dan de 10% stappenmotoren beginnen om te lijden en kunt verliezen stappen. In langzamere machines trillend Mach3 onschadelijk is en gebruik micro-stappen verbetert de situatie. In alle gevallen, echter, in aanwezigheid van Jitter, U moet verlagen de maximale snelheid. Voor meer informatie, timing gebreken dan Mach3 (of, nog erger op gebreken van LinuxCNC – EMC2), lezen In dit artikel en vooral blik l’afbeelding aan de onderkant van deze pagina.
Gradenboog voor stappenmotoren
 Downloaden van de afbeelding met de rechter muisknop.
Downloaden van de afbeelding met de rechter muisknop.
Deze gradenboog door 200 stappen (1.8 graden per stap), Het is nuttig om te controleren de werking, stappenmotoren. We hebben lang geprobeerd op het Web, en in het einde dat we moesten laten. De huidige afdrukformaten (75 x 75 mm) zijn voor Nema motoren 23. Met een programma voor tekening, of met de printerinstellingen, U kunt de grootte aanpassen, naar kleinere motoren, of groter. De gradenboog kan worden afgedrukt, met een inkjet-printer, op karton.
Hack de goniometer Theremino CNC

We hebben het imago van de goniometer in GCode getransformeerd (met “Theremino ImgToGcode“). De GCode is onder de “Gravure voorbeelden”, Theremino CNC, en het heet “Stappenmotor gradenboog gc”.
Als een basis bevelen wij plexiglas, of gekleurde kunststof.
Om maximale blootstelling, Lijm een vel dun plastic, op een dik vel, andere kleur en invloed hebben op alleen het bovenste blad.
Aanbevelingen voor stappenmotoren
Als grondbeginsel geldt dat de motoren moeten worden vermeden “sgranino” (u hoort een “Natasha” en de motorenfabriek). Als een motor schelpen raakt het werkstuk beschadigd. Er is geen manier terug te gaan en het stuk gooien. Naast het verliezen van uren van machine tijd verliest je de halffabrikaten.
Om ervoor te zorgen dat u niet mis gaan stappen zo: elke aanpassing verhogen, één filter tegelijk, tot de motor schelpen en ga dan terug een 30%, of zelfs 50% om op de veilige kant te zijn. De verordeningen zijn: maximale snelheid en versnelling (Nell ’ HAL). Voor optimale prestaties moet u ook de huidige aan de motor aanpassen (een trimmer on driver module). De kleine trimmer moet worden geschoten met een geschikt schroevendraaier en zorgvuldig. Als de schroevendraaier ontsnapt en een kortsluiting maakt, de bestuurder frietjes direct (en soms pauzes uit).
Als het stuurprogramma het toelaat is altijd goed om de micro-stappen op zijn minst 4. Als u gebruik niet de micro-stap motor produceert sterke trillingen. Mechanische resonanties, veroorzaakt door trillingen, kan ertoe leiden dat u te verliezen stappen zelfs bij zeer lage snelheden. Om dit te voorkomen moet u de huidige aan de motor verhogen, maar dit zou beperken de maximale snelheid.
Beperken van mechanische wrijving en flexibele koppelingen om te voorkomen dat de motor van inspanningen als gevolg van de onvermijdelijke kleine fouten af-as toevoegen. Bovendien zijn de koppelingen ontkoppeling de engine van resonanties van de mechanische onderdelen van de machine. Als de mechanica goed gemaakt zijn en de motor gratis loopt, huidige kan worden verminderd en dat is altijd een plus.
De huidige minimaliseren op de motor is het belangrijk. U moet niet de Max huidige instellen! De huidige opgegeven door de fabrikant is niet de macht die u moet gebruiken. Maar dit is de maximale stroom, waarboven de motor opwarmen zoveel te ruïneren. Vermindering van werken huidige, minimaliseren van trillingen en verhoogt het maximale snelheid. De beste operationele huidige, Het is meestal ongeveer een kwart van die getoond op de motor.
In de aanwezigheid van sterke wrijving we gedwongen worden te verhogen van de huidige. Maar deze stijging heeft een gunstig effect, alleen bij lage snelheden. Bij hoge snelheden je niet verbeteringen. Inderdaad, het gevaar van verlies van afstand verhogingen en u worden gedwongen te beperken de maximale snelheid.
Stuurprogramma's voor Stepper
Stepper niet geschikt voor vervoedering rechtstreeks als jij met de Servo. U moet een stuurprogramma's toevoegen. Wij adviseren dat u vermijdt de oude ontwerp stuurprogramma's die de geïntegreerde SA1042 bevatten, SA1027, Uln2003, L297 en soortgelijke. Beste stuurprogramma's bevatten A4988 chips geproduceerd door Allegro.
De maximale spanning van A4988 is 35 Volt (dus het is aangeraden om ze op te voeden 24 Volt) en de maximale stroom is 2 Ampere (maar in dit geval duurt het een koellichaam en een fan die lucht van bovenaf op alle bestuurders blaast)
 De stuurprogramma's zijn niet aangepast aan de huidige maximale draaglijk door de engine!!! De huidige getoond op de motor is de meest, waarboven de motoren zou beschadigen!
De stuurprogramma's zijn niet aangepast aan de huidige maximale draaglijk door de engine!!! De huidige getoond op de motor is de meest, waarboven de motoren zou beschadigen!
Als de motoren uit 1 Dan is de huidige ampère recht 250 maar en 500 maar. Dus doet de motor niet warmte, de stuurprogramma's weinig warmte en de maximumsnelheid verhoogt.
Vermindering van de stroom wordt een beetje verminderd’ het echtpaar, maar motoren lopen soepeler en laten een maximumsnelheid groter is dan, voordat de beschietingen.
De trimmers van huidige aanpassen, Gebruik altijd een plastic schroevendraaier, anders kan je het branden van de stuurprogramma's of om te beginnen de zekering CncShield tabblad.
Stuurprogramma's voor het beheersen van de stappenmotor

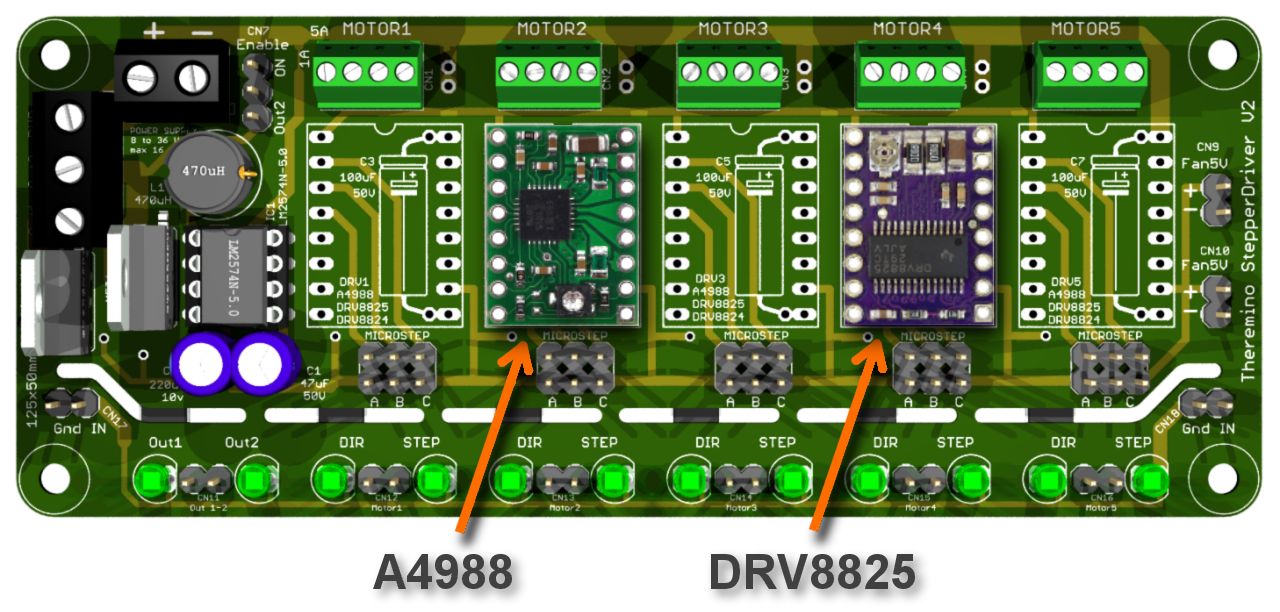
De A4988 (linker afbeelding), zijn perfect compatibel met DRV8825 (de afbeelding aan de rechterkant), Maar je moet oppassen dat ze omgekeerd aan elkaar moeten worden gemonteerd (Zie de volgende afbeeldingen).
Het is aan te raden, beide 4988 dat de 8825, met spanning 12 of 24 Volt en niet meer. Met 24 Volt maximale snelheid is iets hoger. De 36 Volt is het beste niet om ze te gebruiken omdat de 4988 Houd ze niet gelijk en de 8825 zou werk te dicht bij de grens.
U moet hen niet gebruiken op huidige groter is dan 1 Ampere. Maximaal 2 Ampere, maar met elke dissipators op stuurprogramma's en een interne ventilator koelt dat ze alles van bovenaf.
Hoewel in deze foto's de A4988 verschijnen zonder heatsink, bijna alle verkopers bieden hen met de heatsink.
Zoals een deur-stuurprogramma te gebruiken?
Zijn zeker het vermijden van de cnc-controller met stuurprogramma's op één plaat gelast. De eerste fout u moet gooien l volledige ’ controller. Dus besteden u veel, U zult verspillen en vervuilen, zelfs gaan tegen onze beginselen te beperken van afval.
Stuurprogramma's kunnen gemakkelijk breken (slechts een kortstondige slecht contact op een motor) en u kunt de chips op de plaat niet vervangen, vervolgens gooi je weg hele-stuurprogramma voor de controller, verliest u honderden dollars en stop die de auto erg lang duurt. Het is ook niet mogelijk om te lassen van nieuwe stuurprogramma's op een plaat, Dus als we beginnen, Bijvoorbeeld,, met drie coureurs, U kunt een vierde en een vijfde toevoegen. Dit zal leiden tot het produceren van controller met vier of vijf stuurprogramma 's, zelfs als de vierde en vijfde zijn nog nooit gebruikt, terug te gaan tegen onze beginselen te beperken van afval.
Een goede oplossing is het gebruik van stuurprogramma's met de aansluitingen, dus ik kan vervangen of eenvoudig toevoegen.

Stuurprogramma's voor de vervanging van Rediculously (over 3 Euro) en vervang in dertig seconden. Als u een reserve koopt en u hebben ervoor gezorgd dat zal de machine nooit stoppen.
Ben niet fooled door verkopers die schema's niet publiceren en “Ik denk dat” dat hun stuurprogramma's beter zijn. Als je gaat om te controleren de chips zijn dezelfde als deze stuurprogramma 's, Het is altijd geweldig A4988 (uitvoering of een gelijkwaardig) producten van Allegro.
En heb je ook aandacht aan de controleur rechtstreeks op de belangrijkste printplaat gesoldeerd, Geen koelventilator en heatsink-minder chip. De chips zal opwarmen alot, verhoging van de kans op mislukking en verliezen de hele controller.
Stuurprogramma Board – Een draagvlak voor stuurprogramma 's
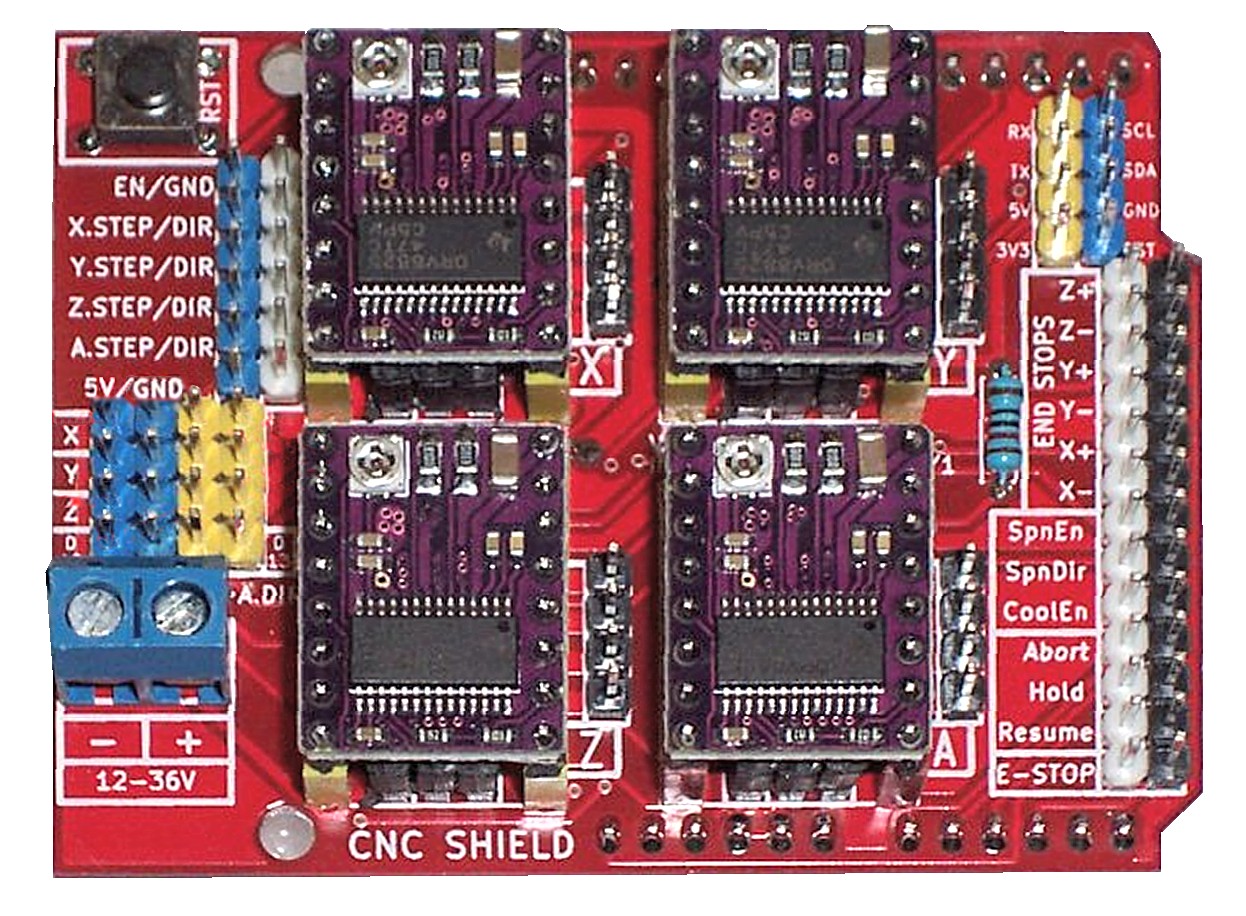
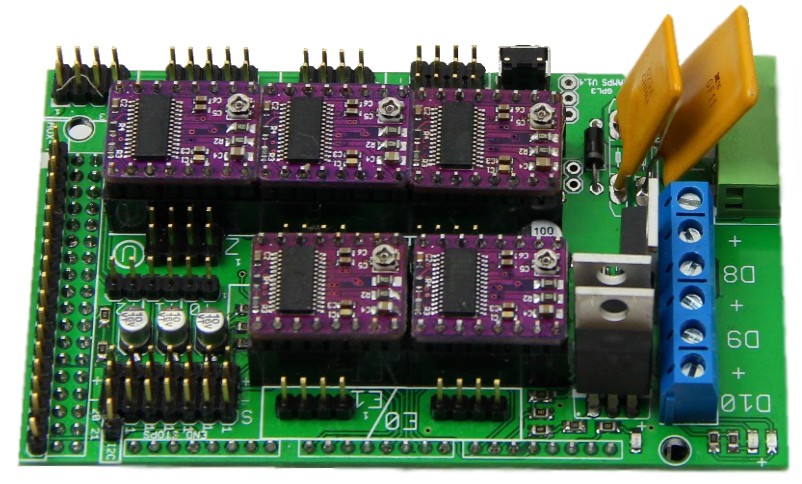
Niet kopen dure cnc-controller met de chip rechtstreeks gesoldeerd aan boord! De treinbestuurder dient altijd vervangbare, zoals in Driver Board van deze beelden.
In de afbeelding hierboven zie je de plaat Theremino_StepperDriver (informatie op deze pagina), Terwijl in de twee afbeeldingen hieronder u ziet de “Laadplatforms” En de “CncShieldV3”. De laatste kosten minder, maar ik ben niet optocoupled, Zo kunnen zij het genereren van elektrische ruis problemen.



Aanbevelen dat je de maximale modulariteit, tot de toekomstige wijzigingen, verbeteringen en vervangingen. Of met Breadboard en bakkebaarden Dupont leidt, of met de adapter plaat Theremino_StepperDriver, of met de Laadplatforms, of met een CncShieldV3 (de laatste twee kan worden gevonden op eBay).




Platen als de hellingshoek en de CncShieldV3, niet speciaal is gebouwd voor de sistemaTheremino, om de verbindingen die verwijzen naar de schakelschema's te maken. Als in geval van twijfel kunt u mailen.
Posizionare ik stuurprogramma sulla CncShieldV3 e sulla hellingen
Deze beelden zijn alleen geldig voor naar de wagenmenner DRV8825, ervoor dat de A4988 moet worden geplaatst met de trimmer over. Voor andere stuurprogramma's Controleer de website van fabrikant.
In het volgende voorbeeld een bedrading
AANDACHT: Zodat de motoren inschakelen moet signaal worden verbonden met GND. Dus altijd een jumper zetten “NL / GND”. Als u vergeet om dit te doen verplaatsen de zoekmachines niet.


In deze afbeelding ziet u een voorbeeld van bedrading tussen meester en CncShieldV3.
In deze bedrading zijn negen master Pin-toewijzingen gekoppeld aan vier bestuurders en vijf InOut “Gebruiksvoorwaarden”. De InOut kan dienen te beheersen de ontsteking van de rotatiemotor en te lezen van de onderste schakelaar. Doesnít, nog steeds beschikbaar drie meer InOut, op de Master.
Signaal draden kunnen worden losgekoppeld en verplaatst op elk gewenst moment, zelfs met alles ingeschakeld, maar aangezien er een grote, slechte voeding aangesloten op 220 Volt, je moet heel voorzichtig zijn dat de grond draad, tussen CncShield en Master, zijn korte broek, sterk en altijd verbonden.
Verbindingen tussen de Master en de stuurprogramma's Theremino
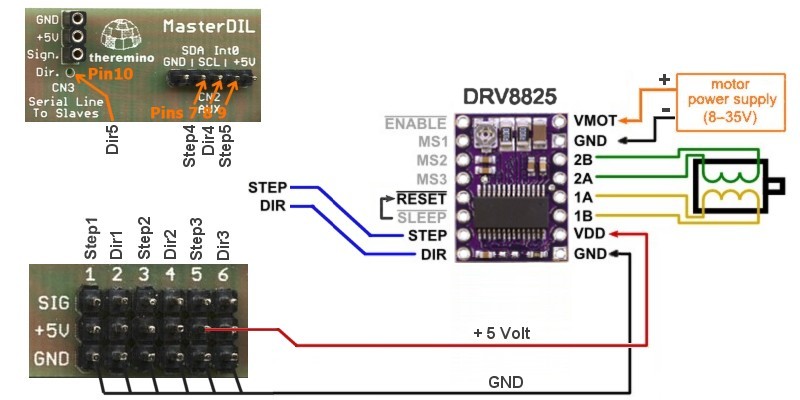
Hier verklaren wij aansluiten direct de Master stuurprogramma's, zonder gebruik van een bestuurder-bord.
Stuurprogramma's A4988

Stuurprogramma's DRV8825
Instellingen van uitvoeringen
| C (M0) (Ms1) |
B (M1) (MS2) |
In (M2) (Ms3) |
Uitvoeringen instellingen Drv8825 |
Uitvoeringen instellingen A4988 |
| Lage | Lage | Lage | Volledige stap | Volledige stap |
| Hoge | Lage | Lage | Halve stap | Halve stap |
| Lage | Hoge | Lage | 1/4 stap | 1/4 stap |
| Hoge | Hoge | Lage | 1/8 stap | 1/8 stap |
| Lage | Lage | Hoge | 1/16 stap | – |
| Hoge | Lage | Hoge | 1/32 stap | – |
| Lage | Hoge | Hoge | 1/32 stap | – |
| Hoge | Hoge | Hoge | 1/32 stap | 1/16 stap |
Lage middelen: “Verbonden met GND” dat wil zeggen “Unjumpered”
Alto middelen: “Aangesloten op de positieve” dat wil zeggen “Met brug”
CncShield tabbladen en hellingbanen bruggen leiden tot positieve signalen, dus met alle drie jumpers verwijderd krijg je “Volledige stap”. Gebruik altijd 8, 16 of 32 uitvoeringen, Voeg vervolgens de eerste twee bruggen of de laatste, of zelfs alle drie. En vergeet niet te vermenigvuldigen, Nell ’ HAL, de waarde “Stappen voor mm” voor het aantal micro-stappen set.
AANDACHT: Sommige kaarten (Laadplatforms 1.4 Sommige fabrikanten), hebben de jumpers uitvoeringen selectie niet werken. Sommige kwade genius veranderd de PCB om hen vast te stellen 16 uitvoeringen (Waarom dus dienen in 3D printers). Neem gewoon contact op met een tester selectie jumperpinnen, Als de paren van pinnen zijn kortgesloten, dan is het een van deze kaarten. In dit geval door het verwijderen van de kunststof bruggen, met geduld en met de Dremel, U kunt het PCB corrigeren.
Aanpassen van het venster voor inkorten om de huidige beperking
A4988 module, product met Pololu, De trimmer is uit 10 KOhm en is aangesloten op de 5 Volt met een weerstand van 20 KOhm. Waarbij de spanning van de verwijzing, met de trimmer op maximum, is van 1.6 Volt. Deze verwijzing is gedeeld door acht intern op de chip en vervolgens vergeleken met weerstanden 0.05 Ohm. Vervolgens krijg je een stroom gelijk is aan twee en een half tijden de referentie spanning.
Op formulier DRV8825, geproduceerd door Pololu, De trimmer is uit 10 KOhm en is aangesloten op de 3.3 Volt gestabiliseerd. Waarbij de spanning van de verwijzing, met de trimmer op maximum, is van 3.3 Volt. Deze verwijzing is gedeeld door vijf binnen de chip en vervolgens vergeleken met weerstanden 0.1 Ohm. Vervolgens krijg je een stroom gelijk is aan tweemaal de referentie spanning.
De referentie spanning wordt gemeten door een tester met de negatieve naar de GND en de positieve in midden van trimmer.
Dit zijn de huidige verordeningen die zijn verkregen:
| Positie van grastrimmers | A4988 | Drv8825 |
| Bij de meeste | 4.0 Ampere | 6.6 Ampere |
| Drie-kwarten | 3.0 Ampere | 4.9 Ampere |
| Een twee-derde | 2.7 Ampere | 4.4 Ampere |
| In mid- | 2.0 Ampere | 3.3 Ampere |
| In een derde | 1.3 Ampere | 2.2 Ampere |
| In een kwart | 1.0 Ampere | 1.6 Ampere |
| Nul | 0 Ampere | 0 Ampere |
AANDACHT: Zoals u kunt zien, Wie ontwierp deze formulieren heeft volledig gemist van de volledige schaaluitslag. De maximale stroom draaglijk (zelfs met het maximum van de heatsinks en ventilatoren) is van 2 Ampère voor 4988, en 2.2 Ampère voor 8825.
De volledige omvang van de trimmer is dus twee of drie keer groter is dan wat redelijk zou zijn. Met een volledige schaal zo hoog wordt de snoeischaar aanpassing twee of drie keer moeilijker. Dus wees zeer voorzichtig om te gaan nooit meer dan de helft (met de 4988) en nooit meer dan een derde (vertegenwoordigt de 8825).
Bovendien, gewoon om te maken de aanpassing nog moeilijker, Sommige Tondeuses hebben geen mechanische achtergrond. U krijgt op nul, de pas zonder merken en u overschakelen van ’ andere kant, geeft de maximumstroming en onmiddellijk sprong zekeringen en stuurprogramma 's.
SUPER AANDACHT: Er zijn stuurprogramma's met de trimmers die integendeel fungeert. Waarbij eerder vertrouwen hun stuurprogramma's, Het is goed voor het meten van de spanning-trimmer. Aan te passen aan een minimum, tegen de klok in, de spanning moet minimaal (van nul volt tot 100 millivolts). Door het maximum aan te passen, met de klok mee, de spanning moet maximale (Van 1.5 in 3.3 Volt afhankelijk van het stuurprogramma). Als het niet veel zorg besteden aan het gebruik van de benodigde stuurprogramma 's, Onthoud altijd dat wet tegendeel (Wie maakte deze PCB 'S moet worden overgeheveld naar het departement “riool reiniging”, voordat hij meer schade kan doen).
Als u wilt aanpassen van de trimmer u kunt doorgaan met installeren op drie manieren
METHODE 1 – VERTRAGEN: Deze methode is geschikt voor precision liefhebbers, willen weten van de numerieke waarde van de huidige. Spanning van toepassing op de bestuurders (zelfs de 12 of 24 Volt die u nodig hebt om te voeden intern op 5 Volt van sommige chauffeurs) maar sluit niet de motoren. Meten van de spanning tussen de grond en het metalen deel van de trimmer. De kruisspanning om het verkrijgen van een stroom die de helft van de nominale stroom is (twee en een half tijden de spanning =, met 4988, of 2 keer de spanning, met de 8825). Dan beginnen te maken van tests omhoog of omlaag, altijd gemeten met meter voor elke test. Gebruik een geschikt schroevendraaier (betere kunststof) en Wees zeer voorzichtig. Natuurlijk moet u voor elke test de macht verwijderen, ontkoppelen en opnieuw aansluiten van de krachtmachines. Waarom deze methode is zeer traag.
METHODE 2 – VOOR EXPERTS: Instellen van de grastrimmers aan eye, Volgens de huidige tabel. Vervolgens van een kwart en nooit gaan meer dan de helft (met de 4988) en nooit meer dan een derde (vertegenwoordigt de 8825). Om te bepalen locatie zorg ervoor dat u waar is het minimum (veel gebruik van licht en een goede lens).
METHODE 3 – VOOR EXPERTS: Mark het puntje van de trimmer (tegenover de vlakke plek), met een klein teken van Sharpie. Aanschaffen een kunststof schroevendraaier, veel licht en bril. De trimmer ongeveer een kwart draai, of minder, voordat de stroomvoorziening. Probeer de motor herhaaldelijk, om de maximale snelheid en kracht (Als u verhoogt de huidige het koppel, maar met te veel huidige maximale snelheid daalt). Stijgt geleidelijk de snelheid, totdat de motor schelpen en stopt, Probeer je te verplaatsen van het meerdere malen en tot wijziging van de huidige zodat het beter gaan. Met een beetje’ ervaring hoor je de sweet spot, luisteren naar het geluid van motoren. De aanpassingen zijn gedaan met micro-stappen permanent instellen.
Wie weet goed Engels ook oogt dit schattig video van Pololu dat verklaart het aanpassen van de trimmers.
Overwegingen die van toepassing op alle bestuurders zijn
Een enkelvoudige Theremino Master kunt maximaal vijf stappenmotoren. De twee draden rood en zwart, die leiden “+ 5 Volt” en “GND” het eerste stuurprogramma, voedsel kan ook worden voortgezet en andere stuurprogramma 's.
Altijd verbinding maken, ten minste de draad GND, tussen de kapitein en de stuurprogramma 's. Ook niet vergeten te verbinden “Reset” met “Slaap”.
AANDACHT: Altijd verbinding maken met een condensator om te 100 UF tussen “VMOT” en “GND”. De Elektrolytische condensator moet worden, Niet type “Lage ESR”, met de positieve aangesloten op “+”, Het moet in de buurt van het module-stuurprogramma (op een paar centimeter). De bedrijfsspanning van de condensator, moet ten minste 5 Volt meer, motor netspanningsvoltage.
Bij gebrek aan deze condensator, U kunt extra gevaarlijke spanningen, dat kan ertoe leiden dat u te verliezen van de USB-communicatie, schade van de stuurprogramma's en ook schade aan de Master.
In dit specifieke geval, om te voorkomen dat resonantie verschijnselen veroorzaakt door de hoge zelfinductie aanwezig, Gebruik geen lage weerstand elektrolytische condensatoren in serie (Lage ESR), maar de gemeenten 100 UF, met ongeveer 1 seriële Ohm weerstand. Lees de waarschuwingen van Pololu op deze pagina 's:
https://www.pololu.com/docs/0J16/all
https://www.pololu.com/product/1182
Voordat powering alles moet worden aangesloten op een betrouwbare manier. Als het komt uit een draad-motor, of link GND, A4988 stuurprogramma beschadigd. Als u het venster voor inkorten betekent een korte met de schroevendraaier, de bestuurder barst direct. In sommige gevallen zijn chip ontploft en vertrekt om te roken. De Master Theremino moeten bestand zijn tegen deze martelingen, maar het is best niet om hem op de proef.
Dit is niet te zeggen, dat de bestuurders onbetrouwbaar zijn. Als u geen fouten maakt, nooit pauze.
Maar het is raadzaam om altijd verbinding maken met de stuurprogramma 's, met mannelijke en vrouwelijke aansluitingen, voor snelle en gemakkelijke vervanging. Het is raadzaam dat u vijf of tien koopt, om een beetje’ Commons, en de prijs verlagen.
drivers TB6600
Op eBay kun je volledige bestuurder van foto-koppelingen en goedkoop genoeg te kopen. Ze zijn individuele bestuurders, dwz u moet gebruiken één voor elke motor.
Er zijn verschillende modellen op de markt, allemaal met redelijk vergelijkbare kenmerken. Op deze pagina beschrijven we alleen de TB6600, maar het advies en de patronen ook van toepassing op vele andere modellen, bijvoorbeeld, de TB6560 dat u kunt ook op Winkel-ino.
In de volgende twee afbeeldingen ziet u op TB6600, in versie zonder container en container.
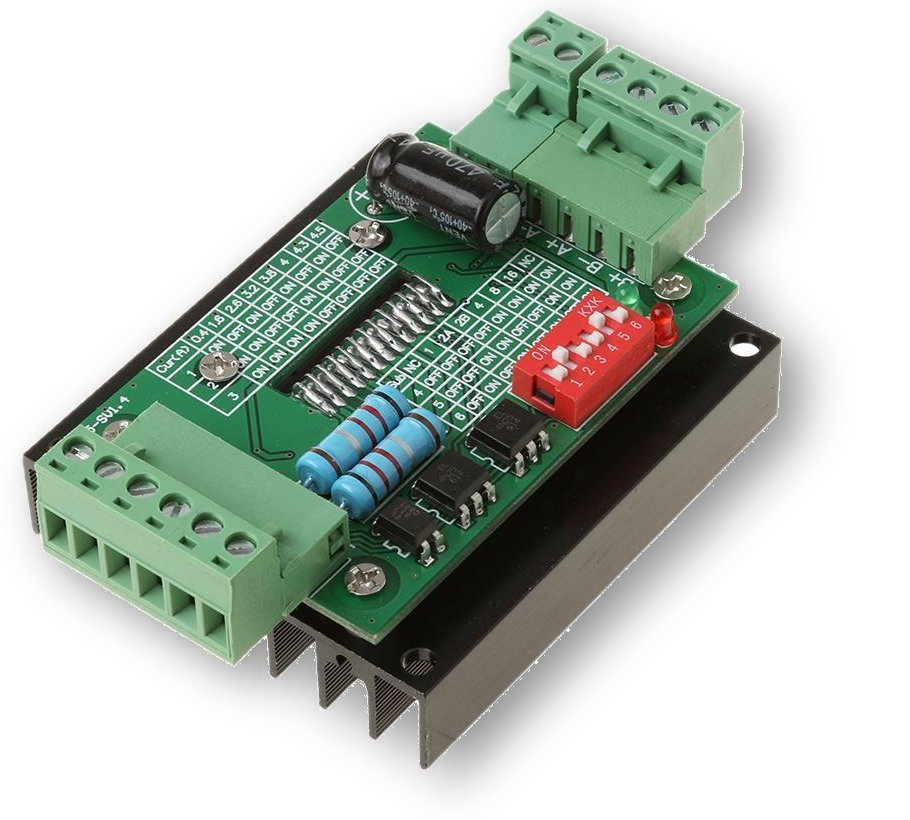

Kenmerken van TB6600 stuurprogramma
- Voedingsspanning van 9 in 42 volt
- Verstelbare huidige t/m 4 Ampere
- Interne temperatuur en overstroom bescherming
- Verordening van micro-stappen 1 tot 32
- Photocoupled ingangen met gedeelde positief
- Positieve ingangen verbinden 5 volt
- De ingangen moeten worden gereden met een transistor open collector
Banden tussen de Master module en stuurprogramma's TB6600
Intern TB6600-stuurprogramma 's (en dergelijke), de foto-couplers zijn verbonden met positieve via weerstanden 330 Ohm. Om piloot ze betrouwbaar, hebt u een positieve spanning van gebruiken 5 volt. De uitgangen van de Master module, die leveren spanningen tussen nul en 3.3 volt, direct naar deze stuurprogramma's kunnen niet worden gekoppeld.
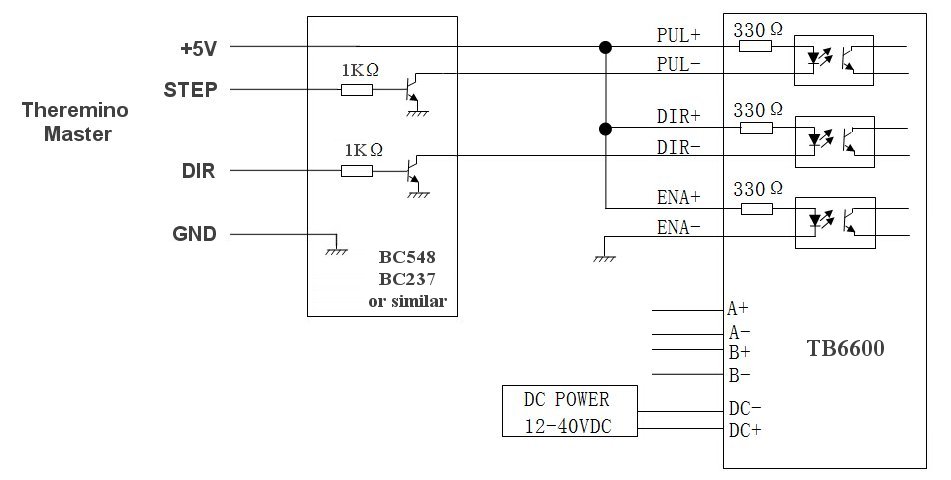
Bovendien, Aangezien de foto-couplers permanent met de positieve verbonden zijn, en loodsen hen van hun negatieve input, Hieruit volgt dat een hen met een transistor openen-verzamelaarster rijden moet. De transistor maakt een signaal inversie, waarvoor krijg je te schakelen op de fotokoppelinrichtingen toen de Meester is hoog uitgangssignaal.
Sommigen zullen misschien een beter inzicht in het volgende beeld dat is meer realistische (dank aan Armando die gezonden).
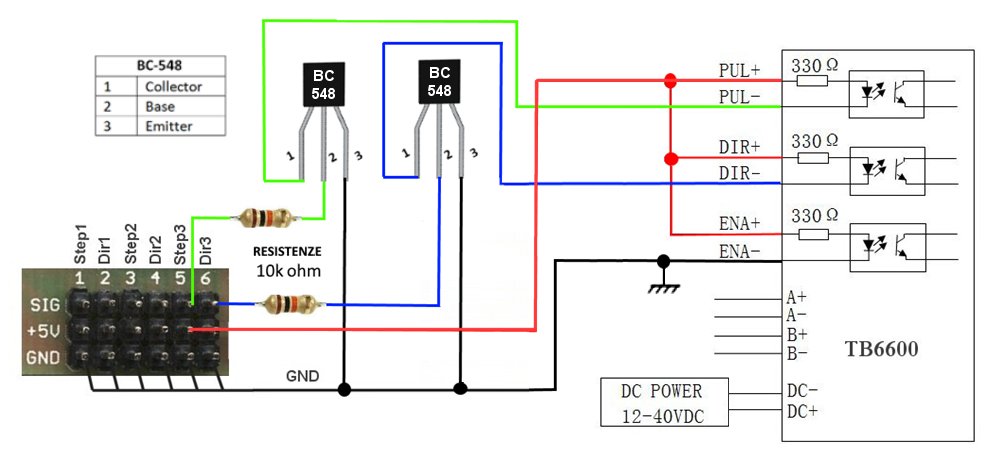
In de eerste afbeelding gebruikten we weerstanden 1k, dat ik ben een beetje’ downs en verspilde een paar milliampère. Aangezien de huidige aan te drijven is laag kunt u maximaal worden verhoogd tot 10k. In de praktijk kunt u ook enige tussenliggende weerstand gebruiken, bijvoorbeeld 2.2K, 4.7k o 8.2k.
De twee transistoren en twee weerstanden, Adapters zijn open-collector. Daar kunnen ze bouwen op hetzelfde draadloze verbinding zoals uitgelegd deze sectie, of op een gedrukte schakeling volgende dit project.
Blijkbaar deze drivers kunnen ook werken door het verbinden van de uitgangen van de master direct naar DIR ingangen- e PUL-, maar het lawaai immuniteit zou laag zijn en het risico van verlies stappen zouden zeer hoog zijn.
Verbinding maken met de machines met de parallelle poort

Koppel de ontstekingskabel van de parallel, u sluit het Theremino CNC Adapter, en we gaan meteen werken. Deze adapter kan worden gebruikt voor Mach3 of LinuxCNC (met de juiste PlugIn), maar nog beter, met de toepassing Theremino CNC, Het is veel gemakkelijker te gebruiken.
https://www.theremino.com/hardware/adapters#cnc
Servo besturingselementen
Er zijn allerlei soorten actuatoren en macht. De servo's zijn ideaal voor vele toepassingen, verbinding naar elke Pin van de meester van de Theremino (tot 6 tijdgenoten) of op de pinnen op de slaven “Knecht” die kunnen vliegen tot 10 per stuk. U kiest “Knecht” Hoe Pin type en werk onmiddellijk. Om te proberen hen, Klik op de juiste kolom waarde van toepassing HAL, en beweeg de muis, Houd de linker knop ingedrukt.

De MG930 ook gemarkeerd TGY930, Het heeft een positie nauwkeurigheid van ten minste vijf keer groter, in vergelijking met alle andere modellen. Digital wordt, Het heeft een vrij hoog begin stroom en een hoge doordringende geluid over 400 Hz. Haar bereik is ongeveer 140 graden.

De HX5010 is zeer krachtig, minder nauwkeurig dan de TGY930 maar zeer goedkoop, kosten alleen 4 euro en het is de moeite waard alle. Excursie = 200 graden.

De HTX500 is erg klein, heel nauwkeurig en goedkoop, Natuurlijk heeft een grote macht, maar het is genoeg voor vele kleine toepassingen, Hij heeft een volledige 180 graden en zelfs wat meer.


De HXT900 en de TG9e kosten minder dan 2 Euro, ze zijn goed voor alle kleine en middelgrote toepassingen en hebben een volledige 200 graden.

De MG958 is de macht van een monster 15 Kg/cm en slechts kosten 11 Euro. Opgelet het verbruikt veel stroom en u niet kan voeden het met USB alleen. Zijn parcours: 135 graden.
Een dienaar zeer gelijkaardig aan dit is het TGY - 1501MG, Hij ook uit 15 Kg/cm, vergelijkbaar in grootte en meer beschikbaar. We hebben nog niet geprobeerd maar de functies zijn OK.
Samenvatting van de belangrijkste kenmerken van de servo 's.

Deze servo's werden gekozen voor de prijs, de nauwkeurigheid en de kracht onder een groot aantal modellen die we hebben getest door ze uit te kopen: www.hobbyking.com (Het heeft grote prijzen en schepen in een korte tijd, hoewel het is gesitueerd in de USA)
Een ander adres voor de servo's is: www.Robot-Italy.com Van robot Italië zijn niet de modellen in deze lijst, maar alleen zeer duur en vreemde versies, met inbegrip van die van de drie revoluties, acht revoluties en continue beweging. Altijd van Robot-Italië kunt u sensoren, motoren, Robotic grijpers en vele andere interessante en unieke accessoires.
Hoogwaardige servos

–
–
–
Dit belooft veel hogere prestaties DS8231 te TGY930, We hebben geprobeerd maar wordt geproduceerd door JR en u kunt vertrouwen.
http://www.jramericas.com/45190/JRPS8231/
De functies zijn: Resolutie goed 5900 stappen op 120 graden rotatie zeer laag DeadBand (de bouwer zegt "onbestaande") Twee lagers verdeeld lagers voor maximale nauwkeurigheid tarief hartslagsturing lus van 250 MHz voor hoge precisie huidige stroomverbruik iets hoger dan een normale dienaar lengte 39.1 mm breedte 19.1 mm hoogte 34.5 mm gewicht 49 gram koppel 1.26 Kg/cm kosten 70 Euro
Maatregel stap en doden-band
Maatregel de nauwkeurigheid van servo is gemakkelijk, uitsluitend premieaffaires te ontvangen op de servo een beeldschermadapter en voeg vervolgens een lange stijve plastic buis 25 centimeter op een van de armen van het Kruis. Dan crasht de servo met een klem door te draaien het met de speld aan de bovenkant en met de buis parallel aan de tabel die op een lijn grafiek papier eindigt, Terwijl een paar millimeter boven de rij zonder te raken het.
Tot slot de dienaar van zeer kleine hoeveelheden met de up en pijl-omlaag verplaatst en kunnen worden geteld op regel hoeveel kleine bewegingen zijn gezien doet voor iedere millimeter, Dit zijn de “Stap”
Voor het meten van de doden-band eerst begint unidirectioneel en vervolgens te draai terug met de up en pijl-omlaag totdat u start om terug te gaan, het aantal keren dat u op de pijl, met een eenvoudige berekening, geeft de breedte van de doden-band.
Onbeperkt rotatie en koppel servo met variabele

De servo's hebben doorgaans een rotatie van ongeveer 180 graden, maar voor sommige toepassingen zou beter onbeperkt rotatie motoren. Normaal gesproken in deze gevallen stappenmotoren, maar ze hebben nadelen.
Stepper vereisen een complexe driver circuit, versnelling en vertraging vlonders vereisen en hebben zeer weinig koppel. Met Stepper als u te snel versnellen, of groter is dan de kritische koppel en snelheid, verliest u afstand en dan verliest u de uitlijning tussen software en hardware.
Om te overwinnen van de beperkingen van stepper, duurste auto's gebruik motoren in continue, met feedbacklussen en buiten de motor positie sensoren. Met een dienstknecht gewijzigd krijgen we precies dat., maar zonder de brug circuit rijden, normaal vereist voor motoren blijft. Bridge-stuurprogramma bestaat al op de kleine servo-chip de feedbackmechanismen zal toe te voegen, met sensoren (optische of magnetische) en software. In de meest moeilijke gevallen, Dankzij de kracht van de PC-software, u kunt ook het toevoegen van een PID-algoritme.
Met een eenvoudige wijziging van kunt de servo te laten werken in multiturn wijzigen. In de ongewijzigde knecht, de controle-signaal bepaalt de positie van de krukas. Na het wijzigen van, het signaal bepaalt het toerental en het koppel, in de twee rotatie.
Hier is hoe u krijgen van de dienstknecht multiturn, aangesloten op een PIN geconfigureerd als Servo_16.
| Signaal | Kracht en snelheid |
| 1000 | Maximale kracht en maximumsnelheid met de klok mee |
| 750 | Halve kracht en snelheid met de klok mee |
| 600 | Minimale kracht en snelheid met de klok mee |
| 500 | De knecht staat stil |
| 400 | Minimale kracht en snelheid tegen de klok in |
| 250 | Halve kracht en snelheid tegen de klok in |
| 0 | Maximale kracht en maximale snelheid tegen de klok in |
Alle servo's worden bewerkt voor multi ronde werking, maar we hebben de patronen opgesteld alleen voor HXT900. Deze servo hebben vele voordelen, verbruiken weinig energie, kan worden aangedreven door USB en kost slechts twee euro van HobbyKing: HobbyKing.com _ HXT900 (Wanneer u volgorde van HobbyKing krijg enkele stapels 10 uitbreiding leidt: Van 30 cm en Van 60 cm)
Met de servo HXT900 is de rotatiesnelheid verstelbaar, van een paar rondes per minuut naar ongeveer 80 RPM, en het koppel is instelbaar van minimaal (stopt zodra u een beetje moeite) tot 1.6 Kg/cm (U kan niet stoppen met de PIN, Draai het met uw vingers).
In de volgende tabel toont kracht en snelheid die kan worden verkregen van een HXT900, transformeren de rotatie in een lineaire beweging met draadstangen of katrollen.
| Methode |
Mm per omwenteling |
Snelheid maximale (mm/min) |
Kracht maximale (Kg) |
| Schroefdraad bar 1 mm/Rev. | 1 | 80 | 60 |
| Schroefdraad bar 2 mm/Rev. | 2 | 160 | 30 |
| Schroefdraad bar 4 mm/Rev. | 4 | 240 | 15 |
| Riemschijf diameter 3.2 mm | 10 | 800 | 6 |
| Riemschijf diameter 5 mm | 15 | 1200 | 4 |
| Riemschijf diameter 10 mm | 30 | 2400 | 2 |
| Riemschijf diameter 20 mm | 60 | 4800 | 1 |
De kenmerken van HXT900 geven 1.6 Kg/cm. Vervolgens een HXT900, katrol 20 mm diameter, zou kunnen verhogen 1.6 Kg. In deze tabel, om op de veilige kant te zijn, We berekend 1 Kg.
Een servo HXT900 wijzigen


Verwijderen van de zelfklevende etiketten aan beide zijden, Draai de vier schroeven, Open de servo en snijden van de drie rode draden, dicht bij het circuit bord.


Trek de motor bout, de potentiometer paraderen vanuit het hoofdkantoor. Het metaal met de Clippers gesneden tabbladen, waar worden gesoldeerd de draden.


Verwijder de twee versnellingen uit de schacht en doen weg met de Clippers alle interne onderdelen, voorkomen dat rotatie. Controleer of de as vrij draait.


Gesneden met de Clippers twee tanden liggend op de grotere kettingblad.
Draad de potentiometer in plaats rotonde. Zet de versnelling op de pinnen, vanaf de kleinste. Alle versnellingen gaan met grote bodem, richting van de motor. De grote kettingblad, dat brengt de motor bout, moet niet te worden ingedrukt, maar alleen om dichter bij de ander vistuig, zonder ze aan te raken.


De linker afbeelding is een schema en functionele, de een aan de rechterkant geeft aan wijzigingen te doen en waar te zetten de weerstanden.
Twee of drie kleine SMD weerstanden toevoegen (0603), zoals deze is opgegeven (Klik op de afbeeldingen om ze te vergroten)
Er is ook een HXT 900 met ander circuit dan dat hier wordt weergegeven. In dit bestand zijn er de regelingen en alle informatie die we konden vinden. Het gegevensblad is helaas in het Chinees: uploads/files/HXT900_Type2.zip
Ten slotte sluit de motor en uitproberen.
Servo dan HXT900 bewerken
Het is onmogelijk om aanwijzingen te geven voor alle soorten bestaande servo. In dit bestand vindt u alle informatie, het blad schema's en gegevens, Tot nu toe hebben we verzameld: uploads/files/ServoInfoAndDatasheets.zip
Multi ronde commerciële dienaar
Tot slot, fabrikanten deze mogelijkheid hebben ontdekt. De catalogus Pololu bestaat vier modellen, met prijzen vanaf 5 Euro tot 15 Euro. De link hieronder toont de kleinste, maar van deze link, en verken de hele catalogus Pololu, en niet alleen voor motoren:
http://www.pololu.com/product/2820
Beginselen van de werking van de normale servo en multiturn
Elk model van dienstknecht verschilt mechanisch en elektrisch, maar de principes zijn hetzelfde voor alle servo: uploads/files/ServoCircuitsAndTimings.zip
Werking van standaard servo.
- Het signaal van 0.5 in 2.5 MS, wordt omgezet in de servo-chip, in een waarde die van varieert 0 op drie volt.
- De kleine potentiometer binnen de servo (Afhankelijk van hoe het ingeschakeld), Het biedt hem ook een waarde van 0 in 3 Volt .
- Als de twee spanningen gelijk zijn, de chip spanning aan de motor niet.
- Als de twee spanningen, afwijken van elkaar, de chip door meer en meer macht aan de motor.
- De spanning aan de motor is gegeven op een manier, of in de tegenovergestelde richting, Afhankelijk van of hogere spanning of andere.
Multi ronde werking van de servo.
- De potentiometer wordt vervangen met twee vaste weerstanden, simuleren van de potentiometer altijd in het midden van zijn race.
- Alles is precies zoals in de normale servo.
- Als het signaal opdracht de helft is (1.5 MS), dan de twee spanningen gelijkwaardig zijn, en de chip levert niet macht aan de motor.
- Als de twee spanningen, afwijken van elkaar, de chip door meer en meer macht aan de motor, Unidirectioneel of andere.
Hoeveel macht verzonden naar de motor?
- De chip in de knecht fungeert als een "reactie component".
- De reactie treedt op in gesloten lus servo voor "normale" of "feedback".
- In multi-ronde dienaar is een eenvoudig reactie of "lgg".
- In beide gevallen is er een reactie curve.
- Responscurve, Afhankelijk van de controle-signaal (afwijking tussen de twee spanningen), Hiermee bepaalt u de spanning aan de motor.
- Responscurve is een soort van "S" met een vlakke plek in het centrum.
- De helling van de curve (interventiemacht) wordt gereguleerd door een weerstand.
- De vlakke plek in centrum (dode zone) is aangepast met behulp van een tweede weerstand, dat bepaalt de breedte.
- Theoretisch zou het beter om een heleboel reactie en korte dode zone, maar u kan niet overdrijven.
- Als u de reactie-parameters overdrijven, de motor is meer stevig en kan zelfs krijgen te zwaaien heftig.

Borstelloze servomotoren


Er zijn motoren met of zonder borstels, van alle soorten, vanaf een paar gram van gewicht tot over 10 KW vermogen
In de catalogus: u vindt motoren met grote prijzen en controller om hen met stromingen tot www.hobbyking.com 300 versterkers met standaard signalen van het systeem Theremino.
Met elk “Slaaf” van type “Knecht” U kunt maximaal tien onafhankelijke motoren.
De foto's show een 6 Kilowatt (125 Ampere in 48 Volt) en een kleine controller voor borstelloze motoren.
Enkele van de meest interessante voorbeelden van geselecteerde motoren
De catalogus HobbyKing veranderd. Wij hadden geselecteerd motoren zijn de koppelingen gewijzigd en dit voor ons een probleem is omdat als we gebroken-links werkzoekenden publiceren we bestraffen.
Bovendien de catalogus HobbyKing geworden moeilijker te zien, Waarom kan niet ik motoren voor macht bestellen. Dus het beste dat we kunnen doen is de eerste pagina van de motoren Outrunner wijzen, gesorteerd op grootte:
https://hobbyking.com/en_us/electric-motors-1/size.html
Voorbeelden van controllers voor motoren
Controller van 6 Amp. voor borstelloze motoren (BORSTELLOZE) – over 6 Eurohttp://www.hobbyking.com/hobbyking/store/__4318__TURNIGY_Plush_6A_8bec_6g_Speed_Controller.html
Controller van 25 Amp. voor borstelloze motoren (BORSTELLOZE) – over 8 Euro
http://www.hobbyking.com/hobbyking/store/__11616__Turnigy_AE_25A_Brushless_ESC.html
Controller van 20 Versterkers voor motoren met borstels (GEBORSTELD) – over 3 Euro
http://www.hobbyking.com/hobbyking/store/__9090__Turnigy_20A_BRUSHED_ESC.html
Controller van 30 Versterkers voor motoren met borstels (GEBORSTELD) – over 6 Euro
http://www.hobbyking.com/hobbyking/store/__6468__Turnigy_30A_BRUSHED_ESC.html
Motoren in de catalogus Pololu
Het wordt aanbevolen om te beginnen met deze link, en verken de hele catalogus Pololu, en niet alleen voor motoren. Van Pololu alles voor DIY.
http://www.Pololu.com/category/22/Motors-and-Gearboxes
Motoren in de catalogus Solarbotics
Ook zijn hier motoren (en andere nuttige onderdelen aan de Makers van). Meer kosten, maar het is een blik waard zo nu en dan, zelfs in deze catalogus:
https://solarbotics.com/product/gm2/
https://solarbotics.com/catalog/motors-servos/gear-motors/
AANDACHT: Links naar commerciële bedrijven zou kunnen suggereren een verborgen reclame, daarvoor moet u het: Niemand werpt zijn vruchten af en we hebben nooit een enkele e-mail uitgewisseld met een van de hier genoemde bedrijven. Dus we zijn vrij om te praten over goed en kwaad dan wie dan ook en onze “Winkeltips”, ze zijn alleen nuttige informatie, verkregen tijdens ons onderzoek van componenten.
ServoPID
Deze module is een H-brug die kan controleren gelijkstroommotoren tot vijftig watt (Tot een paar versterkers en meer dan dertig volt) en zet ze in de servomotoren.
Wij danken de fabrikant en verkoper van eBay MaxTheremino, die gemakkelijk is opgesteld printplaten en kits voor dit project. Volgen van MaxTheremino link op eBay en als hij ze had nog steeds te schrijven hem catalogus om hen te krijgen toegezonden.
Degenen die liever alleen de onderdelen te kopen en de PCB technieken afdrukken DIY, Het zal worden gevestigd in gecomprimeerd bestand van alle bestanden die nodig zijn om deze module te bouwen.
Printplaten in Eagle-formaat, afbeeldingen, simulaties LTSpice en regelingen:
ServoPID_V1.zip
Het besturingssignaal kan een signaal zijn klassieke “Knecht” of “PWM”, die afkomstig zijn van een module Master, door één IotModule, van een Netmodule, of zelfs van een afstandsbediening modelvliegtuigen.
De H-brug wordt gestuurd door een microcontroller PIC, Programmeerbare met de firmware die we hebben voorbereid voor verschillende behoeften. In het eenvoudigste geval u werkt met een motor vooruit of achteruit, aanpassen van de snelheid. In meer uitgebreide gevallen met behulp van een potentiometer om de positie te meten en past de positie met een PID-algoritme.
Met de potentiometer en de PID het heeft dezelfde werking van de klassiekers “Knecht” maar, In tegenstelling tot commerciële Servant, heb je de mogelijkheid om elke parameter variëren, morta gebied, meetresolutie van de ADC en de PID coëfficiënten.
In tegenstelling tot normale servo ingangssignaal wordt geïsoleerd met een opto-coupler. Dit maakt het mogelijk om volledig gescheiden te houden van de massa van de motor voedingscircuit van die van het controle PC. Dit radicaal elimineren elektrische storingen die storingen kunnen veroorzaken.
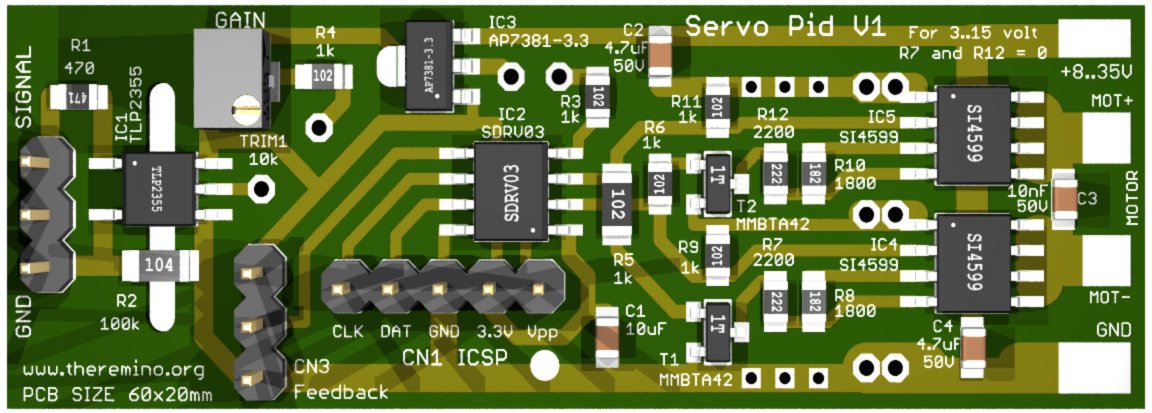
BEDRADING
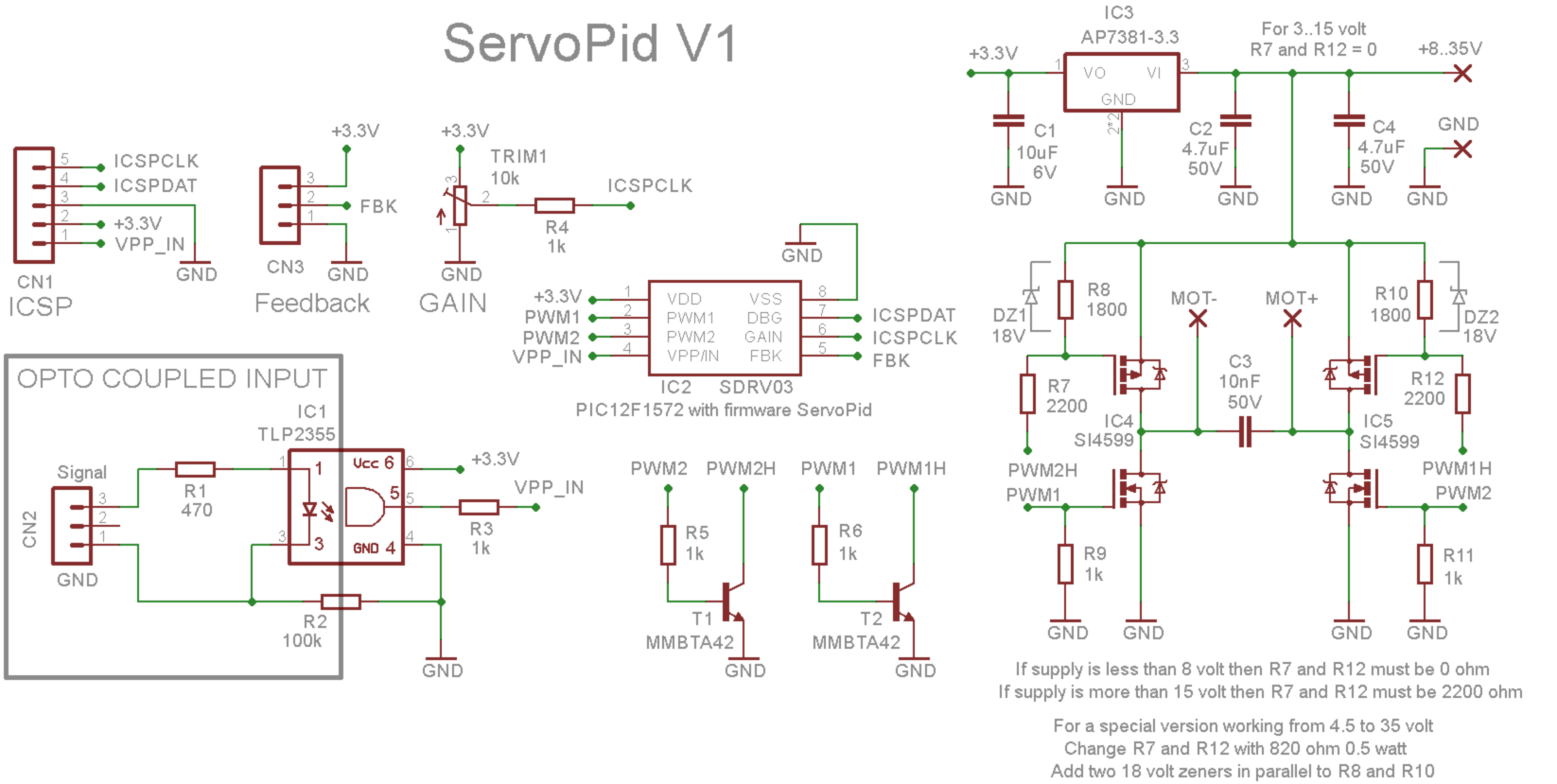
Het besturingssignaal, Servo of pwm, Is verbonden met de connector CN2, met R1 die de stroom de LED van de fotokoppelaar beperkt tot enkele milliampères en piloot.
De amplitude van het stuursignaal moet van 3 in 6 Volt, de positieve pulstijd moet tussen 500 in 2500 ons (over), en de herhalingsfrequentie van 50 Hz tot 500 Hz.
Het stuursignaal blijft via de fotokoppelaar IC1, tot R3 en komt pin 4 van het micro, welke maatregelen de tijd met hoge resolutie (dertig seconden van microseconde).
De connector “ICSP” Het wordt gebruikt om de PIC te programmeren met de controlegroep firmware en ook op een USB-serieel converter aan te sluiten voor het debuggen. Zie het volgende gedeelte “FIRMWARE”.
Als u de configuratie van de firmware met behulp van de PID, vervolgens de steker “Feedback” Moet worden verbonden met een positiemeting potentiometer. Meestal potentiometer is star gekoppeld met de uitgangsas, dat zich op de aandrijfas middels vertrager of band. De feedback potentiometer kan ook multiturn zijn en moet een lineaire potentiometer zijn, waarbij waarden gewoonlijk tussen 1 k ohm en 10 k ohm. De centrale van de potentiometer zijn verbonden met de centrale verbindingsorgaan, de draad in het diagram heeft de naam FBK.
In het geval dat de feedback vindt plaats op het tegendeel, kunt u de twee zijdelingse aansluitingen van de potentiometer tussen ze te verwisselen. Maar wees voorzichtig dat het centrum moet altijd worden aangesloten op FBK. Als u niet de potentiometer kan worden verwarmd en beschadigd.
Het trimmer “KRIJGEN”, Het dient om de versterking van de PID handmatig aanpassen, het alleen gebruikt met een aantal firmware configuraties en vooral tijdens de proeven van een nieuwe motor, te fine-tunen van de PID waarden. De weerstand R4 ontkoppelt de trimmer van ICSPCLK signaal, zodat u het ICSPCLK signaal kan gebruiken voor het debuggen met een seriële.
De spanningsregelaar “IC3” wordt een spanning van 3.3 Volt zeer stabiel. Deze spanning voedt de microcontroller, potentiometer feedback, Qtr1 de trimmer en de optocoupler IC1.
De twee uitgangssignalen van de PIC, met naam en PWM1 PWM2, Flybridge gevormd door de vier MOSFET in de chip SI4599. De brug is afgesloten met een PWM signaal hoogfrequente (normaal 16 of 32 KHz), dat regelt het motortoerental en laat roteren in de ene of andere richting. Tijdens de commutaties de PIC zorgt ervoor dat de twee takken van de brug niet gelijktijdig gesloten (die zou kortsluiting de voeding).
De voedingsspanning moet worden aangepast aan de motor, Als het te veel de motor kan branden. Als u geen wijzigingen in het schema te maken kan gebruikt worden om voedingsspanningen uit 8 in 35 Volt. De grafiek toont de modificaties worden gedaan om andere twee voedingsspanningsbereik toestaan. De eerste reeks (Van 3 in 15 Volt) Het vereist slechts korte R7 en R12. Het tweede gebied (Van 4.5 in 35 Volt) Het moet worden vervangen R7 en R12 alsmede twee zenerdioden toevoegen 18 Volt.
FIRMWARE
Aan het ICSP connector aansluiten van een programmeur PICKIT2 (Zie Deze pagina). Merk op dat het bestand PK2DeviceFile.dat, die ook de PIC12F1572 in dit project, Het is alleen geldig voor PICKIT2. Dus het meest waarschijnlijk met PICkit3 niet in staat zijn om deze PIC te programmeren (of in ieder geval dat we niet weten hoe om te laten zien).
In de ZIP downloaden u aan het einde van deze rubriek vindt u het bestand te vinden ServoPid35.hex reeds voltooid en klaar om te worden geschreven in de PIC met PICkit2.
Dit bestand is de eenvoudigste versie controle. Door variatie van de stuursignaal van licht tot sterk beweegt de motor met variabele snelheid in beide richtingen. Met het regelsignaal in een centrale positie, de motor stopt.
VERZENDEN DEBUG gegevens van de seriële FIRMWARE
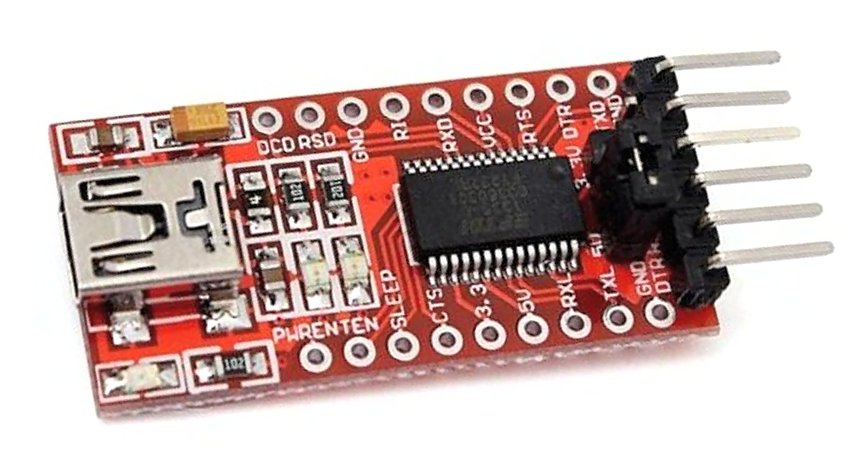
De draad ICSPCLK de ICSP connector wordt ook gebruikt om debug gegevens van de firmware naar de seriële lijn. Om het te gebruiken moet je GND en ICSPCLK verbinden met GND en RX pin van een Serial-USB converter zoals wat is te zien in deze afbeelding.
Dan is de firmware te veranderen u waarden aan de seriële debug sturen, ontvangen van gegevens bij de aanvraag Terminal en hen eventueel de weergave van de SignalScope of andere toepassingen van ons systeem.
Bewerken en opnieuw compileren van de firmware
Om de operationele parameters aan te passen en implementeren van de meest complexe versiebeheer (positieregeling met terugkoppeling en PID) moet u het bestand bewerken ServoPid35.bas en opnieuw compileren. De compilatie maakt een bestand HEX die kan worden geschreven in de PIC met PICkit2.
Om het bestand te bewerken we raden u aan de uitstekende FineLineIDE en het compileren ProtonCompiler.
Beide zijn ze gratis en je kunt ze downloaden via de volgende links:
www.protonbasic.co.uk/content.php/2077-FineLineIDE
www.protonbasic.co.uk/vbdownloads
De instructies en behulpzame reacties op de firmware aan te passen kan worden gevonden in het bestand ServoPid35.bas en aan het einde van het bestand vindt u een verklarende woordenlijst van termen die worden gebruikt en stap voor te vinden voor stap instructies om de PID parameters aan te passen.
Let wel dit is een complex firmware en het zal niet gemakkelijk om zijn opties te leren en te gebruiken op passende wijze alle. Het moeilijkste deel is zeker de PID parameters aan te passen om te voorkomen dat trilling en tegelijkertijd krijg je een snelle reactie en kleinere sterven gebied kan.
We hebben ons best gedaan om de aanpassing van de PID-parameters te vergemakkelijken, gebruik van de Ziegler-Nichols werkwijze en verder te vereenvoudigen. We hebben ook gecorrigeerd aantal fouten van de methode Ziegler-Nichols gepubliceerd op Wikipedia, maar de instelling van de parameters voor een nieuw systeem (motor, kortingen en feedback), Het blijft een operatie door specialisten.
Opmerkingen voor de firmware
Om de dissipatie op de MOSFET's te verminderen is het raadzaam om een lagere frequentie voor de PWM in de firmware in te stellen. Normaal gesproken is de frequentie ingesteld op: 20 KHz, maar in sommige toepassingen hebben we het verlaagd tot 2 KHz reduceert het verwarmingsprobleem van de MOSFET's tot praktisch nul.
De enige contra-indicatie is het geluid dat een beetje zal toenemen. Probeer dus de PWM-frequentie te verlagen en controleer vervolgens bij uw motor of de geluidstoename acceptabel is.
DOWNLOAD FILES FIRMWARE
In de volgende vind je ZIP-bestanden:
– ServoPid35.hex klaar om de PIC in eenvoudige versie open lus te programmeren.
– ServoPid35.bas te bewerken en opnieuw te compileren met FineLine IDE
ServoPid_Firmware.zip