
ステッピング モーター (ステッパー)

注意: ピン型のステッピングを有効にするには, Stepper_Dir と Pwm_Fast を使用する必要があります少なくとも バージョン 5.0 Dell ’ HAL, Theremino マスターで更新するフォームと、 ファームウェア 3.2 またはそれ以降.
どのようなファームウェアを見つけるあなたはちょうど使用 l を持っている最新の HAL ’, マスターを接続し、ピンを数える. オリジナルのファームウェアがたった 6 ピン, バージョンから 3.2 彼ら 10 バージョン以降 4 彼ら 12.
、 最新のファームウェア (4.0) 追加 六つの新しいマスター シェイプの Pin (渡し 6 ピン留め 12 ピン). したがって, すべてのマスター モジュール, 制御できます。, 3 つのエンジンに加え、5 つのエンジンまで 6 一般的な pin プラス 2 つの汎用ピンから. 必要に応じて、その他のマスターとスレーブを追加できます。.
ファームウェア Theremino ステッピング制御機能:
- 超管理簡単な thereminico スタイル.
- ソフトウェアが指定されているもののみを送信する必要があります。, ミリメートル単位で宛先 (メモ 1)
- 有用な作業範囲 -10 で +10 Km (キロ) (mm の手順 = 200)
- 最大 5 軸 CNC マシンを管理します。.
- 六つのエンジンまで RepRap 型マシンの管理 (x, y, z, Z ガントリーと 2 つの押出機によると). 2 つの色を押し出すことができますし、.
- さらに 65 すべての 5 つの kHz 最大周波数が同時にエンジンします。 (メモ 2)
- ジッタ評価未満 20 ナノ秒 (メモ 3)
- 調整可能な最大速度 (差出人 1 で 18000 mm/分) (メモ 4)
- 調整可能な最大加速度 (差出人 5 で 1000 mm/s/s) (メモ 4)
- 監査報告書の到達位置, ミリメートル単位で, 各軸の (メモ 5)
- 2 D や 3 D で独立した軸を使用しての可能性 (メモ 6)
- 2D または 3D の座標軸を持つ, コントロールが容易にアプリケーションを作成します。. 加速度と速度を計算する必要はありません。. 簡易ターゲット コマンドを送信することができます。, ミリメートル単位で. (メモ 7)
- 自動幅のパルス. L ’ は簡体字を使い、ステップ損失リスク, このパラメーターの不適切な設定によって引き起こされる. 写真カプラーのレンズを使用することができます。, 最高速度を制限する場合 (メモ 8)
- 自動極性. L ’ 使用を簡略化し、ステップ損失を避けるため, このパラメーターの不適切な設定によって引き起こされる (メモ 9)
(メモ 3) 比較として: Mach3 はジッタ 500 倍 (差出人 2 で 15 私たち PC によって). 非常に低いジッタがあります。, 手順を失うことを危険にさらすことがなく最高速度で動作することができます。. Mach3 よりタイミング欠陥をよく説明します。 この記事で.
(メモ 4) ファームウェアは、各エラーからモーターを保護します。. お使いの PC がしばらくの間応答を停止するかどうか, ファームウェアはゆっくりと来る, 手順を失うことがなく. データが不規則なタイミングで送信エラーが含まれる場合も同様します。.
(メモ 5) ソフトウェアは、行方不明の距離を読むことができます。, ミリ秒ごと, 各軸と高精度 (1 ミリの 1000 分の 1 の割合). この情報を使用する必要はありません。, 一部のアプリケーションは非常に快適見つけることがありますが、. 診断のために有用である可能性があります。, アルゴリズムは、指定された許容範囲を満たす必要があるか. この情報とソフトウェアはクローズド ループと常に最大速度で働くことができます。. ターゲットによって各エンジンの距離を継続的にチェック, ソフトウェアがまさにあなたが必要がありますを遅く, 速度の複雑な計算を行わず, 軌跡と加速度.
(メモ 6) バージョンで 5.0 HAL の軸の調整が不完全. 自分の世話をする重要なアプリケーション, CNC Theremino アプリケーションに注力してしたがって, 軸調整が終了した後にのみ、.
(メモ 7) 中間送り先がリセットされます。, まで 500-1000 回/秒. 最適なルート, 継続的に再計算します。. L ’ 制御アルゴリズムを考慮, 耐えることができる各エンジンと最大加速度から実際の位置. ただし、CNC アプリケーションは間違ったパスを計算します。, いずれにせよ手順をなくすように.
(メモ 8) 通常、パルスの幅を指定する必要 (Mach3 で 1 で 15 私たち). これは不十分な理解と、多くのユーザーはそれをランダムに調整. 使用広いパルスにより、電子機器のレンズを配置, いくつかの写真-カプラー (たとえば安い 4N25, 4N26 と 4N27). しかし、ダブダブの衝動は、最大有効容量を制限します。. Theremino ルールこの時間 50 私たち (遅い機械のため低迷している電子機器を使用できるようにします。), しかしそれは自動的に減少高速マイクロ ステップの高い値を使用する場合. 最小値 7.7 私たち, 最大周波数を使用する場合 (65.535 KHz).
(メモ 9) 他のパルス発生器 (Mach3 など) パルスの極性を指定しなければなりません. それを設定するために立ち上がりエッジまたは降下に行為をするドライバーを知る必要があります。. この情報は常に利用可能ではありませんし、間違ったことができます損失を散発的にステップ起こるそれを得る場合, スポットには非常に困難. 理論的に間違っているフロントを使用して任意の問題が発生しないで, 立ち上がりエッジ毎に, 必ずしも次の立ち下がりエッジ. しかし, 方向標識が悪い時に更新される場合, 手順を失う可能性があります。, または追加のステップを取る. ファームウェア Theremino マスターの注意方向標識を制御します。. 信号はドライブのドライバーにも使用できます。 (少数派) 立ち下がりエッジに作用します。. この調整を排除します。, 簡単であり、手順を失うリスクを排除.
アプリケーション HAL のピン型ステッピングを設定します。
各ステッピング モーターが必要 2 つの物理的なピン, 管理用の 1 つのステップ. マイクロ コント ローラーは喜びにピンを置く, 我々 は混乱を制限することを決めたが、, プリセット ポジションを指定することによって, ピン型ステッピングモータと Stepper_Dir.
ピン型ステッピングモータ 値を読み取る, 単に mm で目的地であります。. 単純なアプリケーション, 遠く先を指定することができます。, すべてのファームウェアを行うことができます、. 最も要求の厳しいアプリケーション, 自分のパスを計算でき、頻繁に介在する宛先の送信. この手法で, アプリケーションの動作速度を確認できます。 (フィード), 正確にパスを決定し、, 複数の次元でも. ちょうど滑らかな動きを取得するには 20 1 秒あたりの目的地 (まで 50 最も要求の厳しいアプリケーションのため).
逆に軸:
軸の運動の方向を逆にする, 彼らは値をスワップします。 “1000” と “0”, ボックスの “1000 mm を意味します。” と “0 mm を意味します。”.
ピン型ステッピングモータの特定パラメーター:
最大速度 – これは最速のスピード, 1 分あたりのミリメートルで. ファームウェアは継続的にソフトウェアによって送信される目的地をチェックします。. ソフトウェアを求めている場合、エンジンのあまり, ファームウェアが彼の速度を制限します。, 手順を失うことを避けるために. モーターが手順を失うことが表示されるまでこの値を上げる (それは、高く投げられた雑音、停止) それを減少させます、 20..50%, 安全な場所に戻ります. 負荷の下でテストを繰り返す, またはモーターを手動で制動することによって, だから、いくつかの部屋があることを確認します。.
最大 Acc – これは、最大加速度は (減速), 1 分あたりのミリメートルで. ファームウェアは継続的にソフトウェアによって送信される目的地をチェックします。. ソフトウェアを求めている場合、エンジンのあまり, ファームウェアがその加速度を制限します。, 手順を失うことを避けるために. モーター方向の変更時にステップを失うことが表示されるまでこの値を上げる (それは、高く投げられた雑音、停止) それを減少させます、 20..50%, 安全な場所に戻ります. 負荷の下でテストを繰り返す, またはモーターを手動で制動することによって, だから、いくつかの部屋があることを確認します。.
ミリメートルのための手順 – ここでステップを設定する必要, エンジンは、スピン, マイクロを掛けた, コント ローラーを設定します。, ミリメートル単位に分かれており、, モーターの回転によって生成されます。. 場合各スピン, 1 ミリ運動を生成します。, エンジンが 1 回転あたり 200 のステップを, マイクロを使用しないでください。, 値を設定するし、: 200 (1 回転あたりの手順) x 1 (マイクロ ステップ) / 1 (1 回転あたり mm) = 200. 16 マイクロを使用して値を設定する場合: 200 (1 回転あたりの手順) x 16 (マイクロ ステップ) / 1 (1 回転あたり mm) = 3200.
以前にリンク – このチェック ボックスを有効にします。, 前にモーターが接続されています。, プールの一部は、したがって、, 2 D トゥイーンを実行, 3D, 4D または王 5 d. この補間なし, エンジンが少ない道を行う必要があります。, 早く到着とパスし、, 破線のだろう, 2 つまたは複数のセグメントから成る. L を有効にする ’ 補間, すべてのモーターの速度調整です。, 実際の軌道, 直線は、します。. このような調整の活用, コントロール ソフトウェアすることができます。, いくつかのケースで, かなり簡素化します。 (軸調整 HAL の現在のバージョンで未実装します。, 今後のリリースではフィニッシュ)
2 月更新 2015: 多分このオプションは重要ではないです。, 我々 はすべてを考え、’ を開始. おそらく終わるだろう前に他より多くの押すプロジェクト. おそらく私たちに書く, 緊急に必要な場合.
ピンタイプ Stepper_Dir 調整するパラメーターがあります。. 私は物理のプレース ホルダーだけ出力端子, モーターの方向を確立します。. 値を使用する必要はありません。, これらのピンをスロットに書いていること, 一部のアプリケーションは役に立つことがありますが、. スロットに書き込まれる値, 目的地までの距離です。, ミリメートル単位で (1 ミリの 1000 分の 1 の分数まで). 診断のためにこの情報を使用することができます。, アルゴリズムは、指定された許容範囲を満たす必要があるか. この情報とソフトウェアはクローズド ループと常に最大速度で働くことができます。. ターゲットによって各エンジンの距離を継続的にチェック, ソフトウェアがまさにあなたが必要がありますを遅く, 速度の複雑な計算を行わず, 軌跡と加速度.
ピンの詳細を表示します。

ピンの詳細は Hz で加速と最高速度を表示します。 (1 秒あたりの手順). これらの値は、デザイン l に役立ちます ’ エレクトロニクス, テスト中に、どのように多くのマイクロ ステップの使用を決定するには. いくつかのケースで, それは、目安を知っておくと便利することができます。 (手順で), mm の先の代わりに.
HAL のアプリケーションで, ピンの線をダブルクリックします (ステッピングモータの種類). 2 番目のウィンドウで, 下部に, 選択したピンの詳細を読む. 拡大画像をクリックします。.
衝動の精度を示すビデオのプロデュース、マスター モジュール, Mach3 より


YouTube で動画:
http://www.youtube.com/embed/CeC5WD4866o?fs=1&rel=0&loop=1&hd=1&autoplay=1
このビデオで我々 は時間の経過と共に傾斜を見る, インパルスの期間とその後. 2 つのビデオのスケールは同じ, 100 スクエアの NS. Theremino マスターは、パルスを生成します。, 唯一のスリップ 20 ナノ秒. Mach3 を継続的に超えている代わりに 2 マイクロ秒し、は、最悪の瞬間で 10 マイクロ秒. 旅行している場合 25 KHz, だけは Theremino マスターの後に続いて、 0.05%, 一方、Mach3 であります。 25%. 時を超える、 10% ステッピング モーターは、苦しむこととすることができます始めている手順を失う. 遅いマシンにジッタリング Mach3 は無害であり使用のマイクロ ステップが状況を改善. しかし、すべてのケースで, ジッタの存在下で, 最大速度を減らす必要があります。. 詳細については, Mach3 よりタイミング欠陥 (LinuxCNC の欠陥にさらに悪いこと – EMC2), 読み取り この記事 特に見て l’このページの下部に画像.
ステッピング モーター用分度器
 マウスの右ボタンで画像をダウンロードします。.
マウスの右ボタンで画像をダウンロードします。.
この分度器で 200 手順 (1.8 ステップ 1 度), 操作を制御すると便利です。, ステッピング モーター. 我々 は長い間ウェブ上求めています。, 最後に我々 はさせていたと. 現在のプリント サイズ (75 x 75 mm) Nema モーターは、します。 23. 図面プログラムで, またはプリンターの設定で, サイズを調整することができます。, 小型エンジン, 以上. 分度器を印刷することができます。, インク ジェット プリンター, 段ボールに.
角度計 Theremino CNC をハックします。

L を変えました ’ GCode に分度器の画像 (と “Theremino ImgToGcode“). GCode の間では、 “彫刻例”, Theremino CNC, 呼ばれる “StepperMotor 分度器 gc”.
基礎としては、プレキシ ガラスをお勧めします, または着色されたプラスチック.
最大の露出を得るため, 薄いプラスチックのシートを接着します。, 厚いシートに, 別の色とトップのシートだけに影響を与える.
ステッピング モーターのための推奨事項
エンジンを避けなければならない基本原則として “sgranino” (聞けば、 “ナターシャ” ・ エンジン工場). 工作物が破損した場合エンジン シェル. そこ ’ 戻るし、作品をスローする方法はありません. マシンの時間の時間を失うことに加えてあなたが失う準決勝.
逃さないことを確かめるようにステップ進みますので: 各調整を増やす, 一度に 1 つずつ, エンジン シェルまでと 1 つ戻る次に行く 30%, あるいは 50% 安全側にする. 規制は、します。: 最高速度と加速 (ネル ’ HAL). モーターに電流を調整するも最適な性能 (モジュール ドライバーにトリマー). 適切なドライバーと非常に慎重に小さなトリマーが撮影されるべき. ドライバーをエスケープし、短絡回路を作る場合, ドライバーは、すべてフライ ’ インスタント (時々 勃発).
ドライバーは、それを許可されている場合は常に、少なくともマイクロ ステップを設定するのには良い 4. マイクロ ステップ モーターを使用しない場合は、強い振動を生成します。. 機械的共振, 振動によって引き起こされる, 非常に低速時でも手順を失うことがあります。. これを避けるためには、モーターに電流を増やす必要があります。, しかし、これは最高速度を制限します。.
機械的な摩擦を制限し、避けられない小さな軸外エラーのための努力からエンジンを防ぐためにフレキシブル カップリングを追加. さらに、カップリング デカップリング マシンの機械部分の共鳴からエンジン. 仕組みはよく作られていて無料モータを実行, 電流を減らすことができ、それは常にプラス.
電流を最小限に抑えるモーターが重要です. 現在、最大を設定する必要がありますいない場合! 製造元に指定された電流が使用している力ではないです。. しかし、これは最大電流, それを超えるとエンジン熱を台無しにするほど. 現在の作業を削減, 振動を最小限に抑え、最大の速度を増加させる. 最適動作電流, それは通常モーターを示すの四分の一について.
強い摩擦の存在下で私たちは、電流の増加が余儀なくされます。. この増加は有益な効果がありますが、, 低い速度でだけ. 高速での改善を得ることはありません。. 最大の速度を制限する距離が増加し、あなたを失うことの危険性を強制する確かに、.
ステッパー用のドライバー
ステッパーを給紙できませんサーボと同じように直接. ドライバーを追加する必要があります。. 統合された SA1042 が含まれている古いデザイン ドライバーを避けることをお勧めします。, SA1027, Uln2003, L297 と同様. 最高のドライバーを含むアレグロによって生成される A4988 チップ.
A4988 の最大電圧は 35 ボルト (それらのフィードをお勧め 24 ボルト) 最大電流は、 2 アンペア (この場合ヒートシンクとすべてのドライバーの上から空気を吹くファンがかかるが、)
 ドライバーはエンジンによって我慢できる現在の最大値に調整されません。!!! モーターに電流はほとんど, それを超えるとモーターを損なう!
ドライバーはエンジンによって我慢できる現在の最大値に調整されません。!!! モーターに電流はほとんど, それを超えるとモーターを損なう!
エンジンがある場合 1 現在は、アンペア右 250 しかしと 500 しかし. エンジンが加熱しないように, ドライバーが少し熱と最大速度増加します。.
現行は少し減少します。’ カップル, エンジンはスムーズに実行、最高速度を超える可能, 砲撃する前に.
現在のトリマーを調整するには, プラスチック製のドライバーを使用して、常に, それ以外の場合、ドライバーを燃やすことができるまたはヒューズ CncShield タブを起動するには.
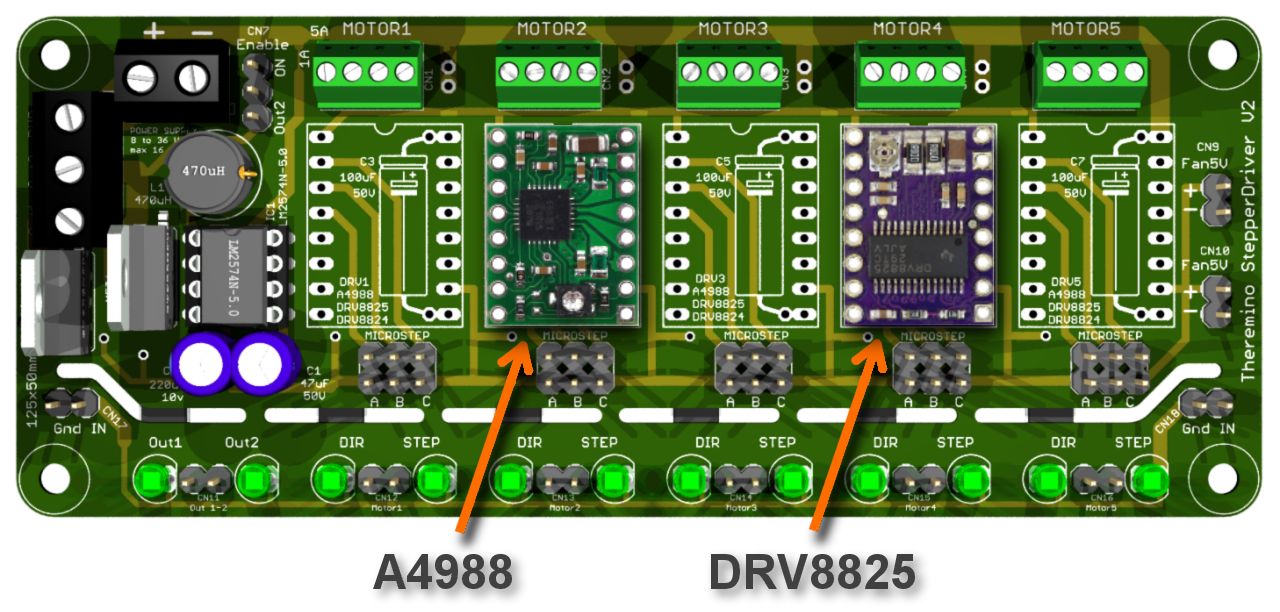
ステッピング モーターの制御用のドライバー

A4988 (左の画像), DRV8825 と完全に互換性のあります。 (右の画像), ただし、一方を他方と逆に取り付ける必要があることに注意する必要があります (次の画像を参照してください。).
お勧め, 両方 4988 を、 8825, 電圧 12 または 24 ボルトとこれ以上. と 24 ボルトの最大速度はわずかに高い. 、 36 ボルトがないのでそれらを使用するが最善、 4988 右それらを保持しないと 8825 限界に近すぎる作業だろう.
大きい電流でのそれらを使用する必要があります。 1 アンペア. 最大 2 アンペア, しかし、すべての上からそれらを冷却しドライバーと 1 つのファンのすべての拡散装置で.
これらの写真で、A4988 のヒートシンクなしで表示されますが, ほぼすべての売り手がそれらをヒートシンクに提供してください。.
使用するドア ドライバーなど?
します。 間違いなくドライバーが 1 つのプレートに溶接と cnc コント ローラーを避けるため. 最初の欠陥 l フルをスローする必要 ’ コント ローラー. だからあなたは多くを費やす, あなたは廃棄物し、汚染, でも理念に逆行 廃棄物を制限するには.
ドライバーが簡単に破ることができます。 (エンジンにだけ瞬間的な悪い連絡先) プレート上のチップを置き換えることはできません、, その後、あなたは全体のコント ローラーのドライバーを捨てる, 数百のドルおよび停止時間がかかる車を失う. 皿の上の新しいドライバーを溶接することはまた, ですから、まず、, たとえば、, 3 名のドライバー, 4 番目と 5 番目を追加できます。. これは、4 つまたは 5 つのドライバーとコント ローラーを生成につながる, 4 番目と 5 番目は使ったことがない場合でも, 私たちの原則に反する戻る 廃棄物を制限するには.
良いソリューションを使用することです。 コネクタ ドライバー, 私は交換したり、簡単に追加.

Rediculously 交換用ドライバー (について 3 ユーロ) 30 秒で置き換えると. 場合は、スペアを購入して、機械が止まらないことを確認.
回路図を出版していない営業担当者によってだまされないと “考える割り当てなさい” そのドライバーのほうが. チップをチェックに行くときは、これらのドライバーと同じ, それは常に偉大な A4988 (または同等) アレグロからの製品.
またかと 主回路基板に直接はんだ付けされるコント ローラーに注意, どんな冷却ファンとヒートシンク レス チップ. チップが多く暖かい, 失敗の確率を増加させると l を失う ’ 全体のコント ローラー.
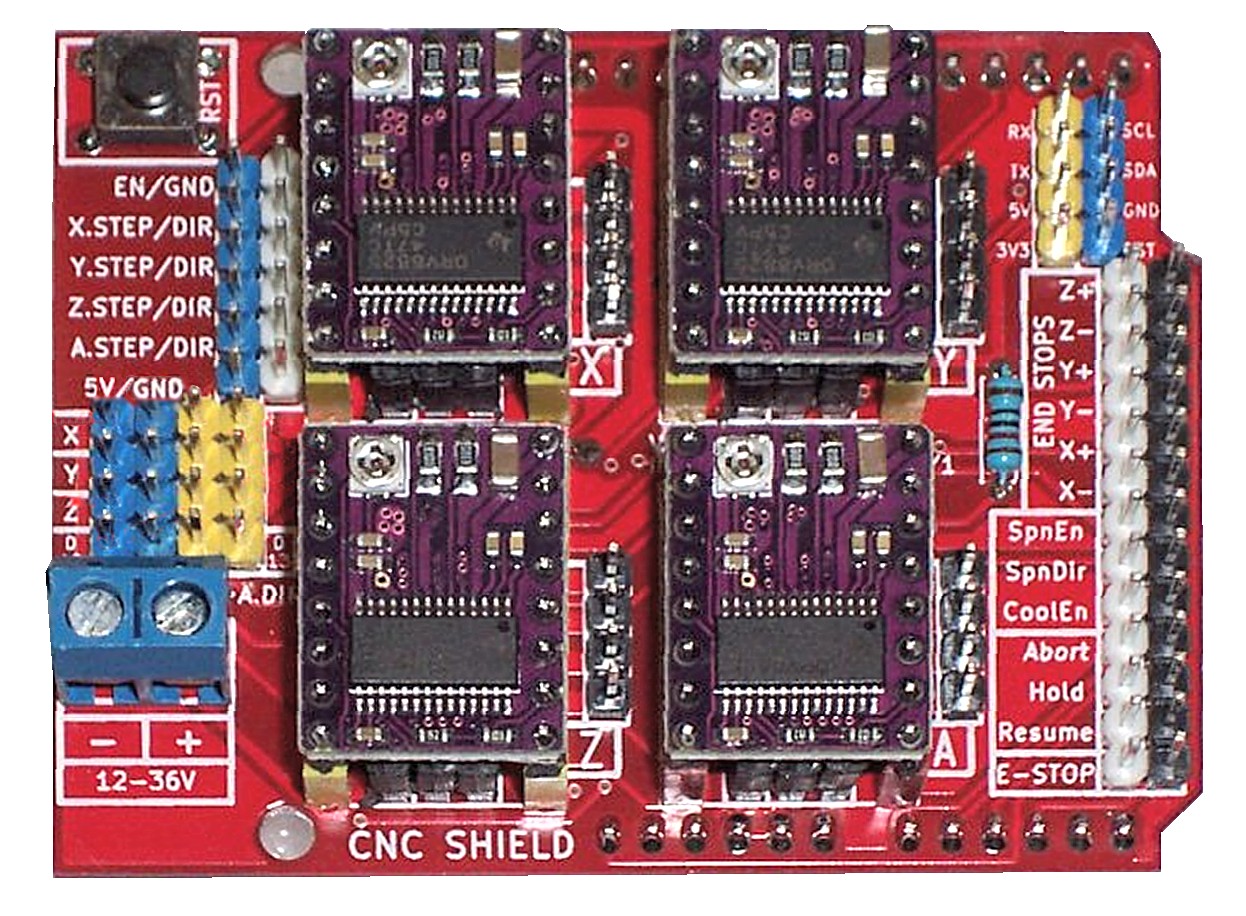
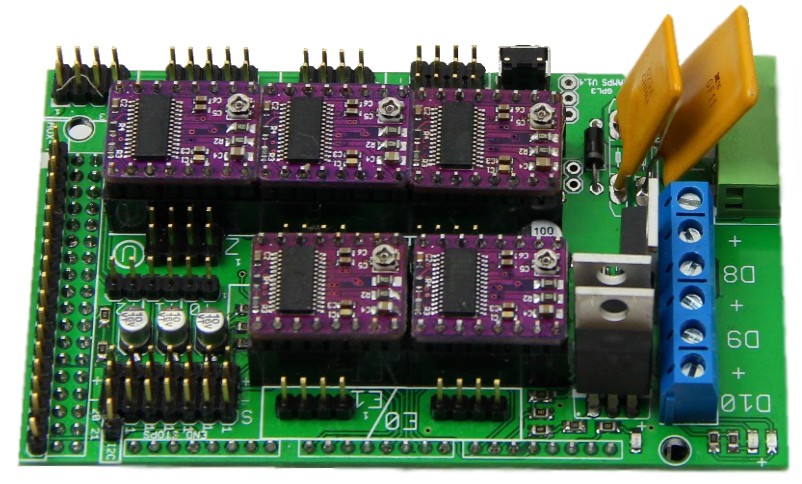
ドライバー基板 – ドライバーのサポート拠点
基板に直接はんだ付けチップを搭載した高価な cnc コント ローラーを購入しないでください。! ドライバーは常に交換する必要があります。, これらの画像のドライバーのボードのように.
上の画像で、プレートを参照してください。 Theremino_StepperDriver (情報 このページで), 以下の 2 つの画像で確認できますが、 “ランプ” と、 “CncShieldV3”. 後者のコストは少ない, optocoupled ではないが、, 電気的なノイズの問題を生成することができますので.



最大のモジュール性を維持することをお勧めします, 将来の変更を許可するには, 改善および取り替え. ブレッド ボードやもみあげ デュポン リード, またはアダプター プレート Theremino_StepperDriver, または、 ランプ, または、 CncShieldV3 (最後の 2 つは、eBay で見つけることができます。).




ランプと、CncShieldV3 プレート, 具体的には、sistemaTheremino の構築されていません。, 配線図を参照して接続を作成するには. かどうか疑いのお問い合わせ.
Posizionare 私ドライバー スラ CncShieldV3 e スラ ランプ
これらのイメージは、ドライバー DRV8825 の有効です, 間でトリマーに、A4988 を挿入しなければならないことを確認して. 他のドライバーは、製造元の web サイトを確認してください。.
配線例
注意: エンジンを有効にするを有効にする信号を GND に接続する必要があります。. だから、いつものジャンパーを置く “EN / GND”. これを行うを忘れてしまった場合、検索エンジンは移動しないでください。.


この写真でマスターと CncShieldV3 間の配線の例を見ることができます。.
この配線で 9 マスター ピン割り当ては 4 つのドライバーと 5 InOut にリンクされて “サービスの”. ホステルは、スピンドル モーターの点火を制御してボトム ・ スイッチを読むを提供できます。. Doesnít, まだ利用可能な 3 つのより多くの InOut, マスターの.
信号線をアンプラグドし、いつでも移動することができます。, オンにしてもすべて, しかし、c 以来 ’ は、大きな、悪い電源に接続 220 ボルト, 地面がワイヤーは非常に注意する必要, CncShield とマスターの間, ショート パンツは、します。, 強いと常に接続されています。.
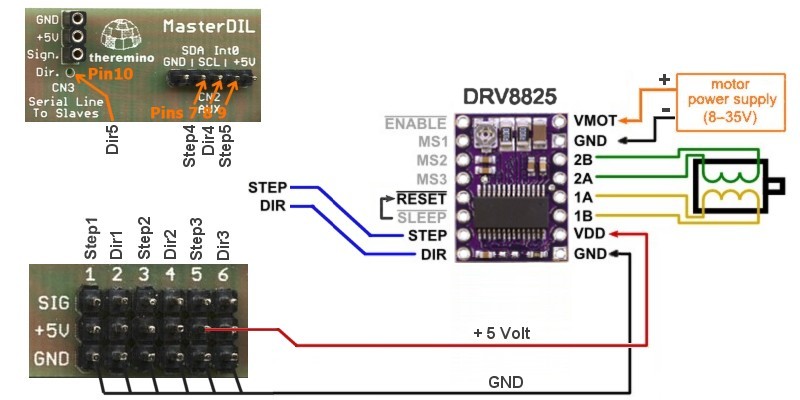
マスターと Theremino のドライバー間の接続
ここでマスターを直接接続する方法を説明ドライバー, ドライバー基板を使用せず.
ドライバー A4988

ドライバー DRV8825
マイクロ ステップの設定
| C (M0) (Ms1) |
B (M1) (MS2) |
で (M2) (Ms3) |
マイクロ ステップ設定 Drv8825 |
マイクロ ステップ設定 A4988 |
| 低 | 低 | 低 | 全手順 | 全手順 |
| 高 | 低 | 低 | ハーフ ステップ | ハーフ ステップ |
| 低 | 高 | 低 | 1/4 ステップ | 1/4 ステップ |
| 高 | 高 | 低 | 1/8 ステップ | 1/8 ステップ |
| 低 | 低 | 高 | 1/16 ステップ | – |
| 高 | 低 | 高 | 1/32 ステップ | – |
| 低 | 高 | 高 | 1/32 ステップ | – |
| 高 | 高 | 高 | 1/32 ステップ | 1/16 ステップ |
低を意味します。: “GND に接続されています。” すなわち “ジャンパーなし”
アルトの手段: “肯定的に接続されています。” すなわち “ブリッジと”
肯定的な信号につながる CncShield タブとランプ橋, 削除すべての 3 つのジャンパーを使っていただけるように “全手順”. 常に使用します。 8, 16 または 32 マイクロ ステップ, 最初の 2 つのブリッジや最後を挿入します。, または 3 つもすべて. 忘れずに掛けると, ネル ’ HAL, 値 “ミリメートルのための手順” マイクロ ステップ セットの数.
注意: いくつかのカード (ランプ 1.4 いくつかのメーカー), 動作していないジャンパー マイクロ ステップ選択をしています。. いくつかの悪の天才が PCB に固定するように設定を変更します。 16 マイクロ ステップ (なぜ、3 D プリンターでサーブ). テスターの選択ジャンパー ピンをチェックします。, ピンのペアを短絡する場合, それは、これらのカードの 1 つ. この場合はプラスチック製のブリッジを外して, 忍耐とドレメル, プリント基板を修正することができます。.
電流制限するトリマーを調整します。
A4988 モジュール, Pololu の製品, トリマーですから 10 K ω に接続されていると、 5 ボルトからの抵抗で 20 K ω. いう基準電圧, 最大でトリマーに, します。 1.6 ボルト. この参照は、チップ内部で 8 で割った値、抵抗と比較して 0.05 オーム. その後、 2 倍半基準電圧に等しい電流を取得します。.
フォーム DRV8825, Pololu プロデュース, トリマーですから 10 K ω に接続されていると、 3.3 ボルトの安定化. いう基準電圧, 最大でトリマーに, します。 3.3 ボルト. この参照はチップ内 5 で割った値、抵抗と比較して 0.1 オーム. その後、 基準電圧 2 倍に等しい電流を得る.
参照電圧を GND とトリマーの中心に肯定的に負のテスターによる測定します。.
これらは、取得する現在の規制:
| トリマーの位置 | A4988 | Drv8825 |
| せいぜい | 4.0 アンペア | 6.6 アンペア |
| 4 分の 3 | 3.0 アンペア | 4.9 アンペア |
| 3 分の 2 | 2.7 アンペア | 4.4 アンペア |
| 中旬- | 2.0 アンペア | 3.3 アンペア |
| 3 分の 1 で | 1.3 アンペア | 2.2 アンペア |
| 四分の一で | 1.0 アンペア | 1.6 アンペア |
| ゼロ | 0 アンペア | 0 アンペア |
注意: あなたが見ることができます。, フルスケールを完全に逃したがこれらのフォームの設計者. 我慢できる最大電流 (ヒートシンクとファンを最大にも) します。 2 アンペア 4988, と 2.2 アンペア 8825.
トリマーのフルスケールですので 2、3 回の何が合理的とされる以上. フルスケールは高いのでトリマー調整になります 2 つまたは 3 回困難. ので、非常に慎重に半分以上行くことはないです。 (と、 4988) 決して以上 1/3 (表す、 8825).
さらに, 調整をも困難にするだけ, いくつかのトリマーは力学的背景があります。. 0 を表示します。, 気付いて、あなたなしパスから切り替える ’ 反対側, 最大電流とすぐにジャンプ ヒューズとドライバーを与えてください。.
超注目: 逆に機能するトリマー ドライバーがあります。. 前にそのドライバーを信頼するという, 測定電圧のトリマーをお勧め. 最小限に調整します。, 反時計回りに, 緊張を最小限にする必要があります。 (ゼロボルトから 100 ミリボルト). 最大値を調整することによって, 時計回りに, 電圧を最大にする必要があります。 (差出人 1.5 で 3.3 ボルト ドライバーによって異なります). それはそれらのドライバーを使用して細心の注意を取らない場合, 逆にその行為を常に覚えています。 (部門に転送する必要がありますこれらの PCB を作った “下水道の清掃”, 彼は、任意のより多くの損傷を行うことができます前に).
トリマーを調整するには、3 つの方法のいずれかに進むことができます。
メソッド 1 – 遅い: この方法は精度愛好家に適して, 現在の数値を知りたいです。. ドライバー印加電圧 (でも、 12 または 24 ボルト内部にフィードする必要があります。 5 いくつかのドライバーのボルト) しかし、モーターを接続しないでください。. 地面とトリマーの金属部分との間の電圧を測定します。. 取得半分の定格電流は、電流に電圧を調整します。 (= 1.5 倍電圧, と 4988, または 2 電圧を回, と、 8825). 上下の確認を開始します。, 常に各テストのメーターで測定. 適切なドライバーを使用してください。 (良いプラスチック) 非常に注意してください。. もちろんテスト、毎回電源を削除する必要があります。, 電源エンジンを取り外して. このメソッドは非常に遅い理由.
メソッド 2 – 専門家のため: 目のトリマーを設定します。, 現在のテーブルによると. その後、 4 分の 1 と決して行く半分以上から (と、 4988) 決して以上 1/3 (表す、 8825). 決定する場所を確認してくださいあなたが最小値 (軽くて良いレンズの多くを使用します。).
メソッド 3 – 専門家のため: トリマーの先端をマークします。 (フラット スポットの反対側), 機転が利く人の小さな看板を. 調達、 プラスチック製のドライバー, たくさんの光とゴーグル. 約四分の一のトリマーを回す, 以下, 電源を入れる前に. エンジンを繰り返し試行します。, 最大のスピードとパワーを得るために (トルクを増やす場合、電流が増大します。, あまりにも多くの現在の最高速度が低下). 徐々 に速度を上昇します。, エンジン シェルと停止まで, その後何回か移動して良く行くように電流を修正するためでしよう. 少しで’ スイート スポットを聞くことができます経験, エンジンの音を聞いてください。. マイクロ ステップ完全に設定の調整が終了します。.
またこのかわいい見えるかもしれませんが人はよく英語を知っています。 Pololu のビデオ トリマーを調整する方法を説明します。.
すべてのドライバーに適用される考慮事項
単一の Theremino マスターは、最大 5 つのステッピング ・ モータを制御できます。. 2 本のワイヤーの赤と黒, そのリード “+ 5 ボルト” と “GND” 最初のドライバー, 食品には継続的かつ他のドライバーすることができます。.
常に接続します。, 少なくとも GND ワイヤ, マスターとドライバー間. また、接続してください。 “リセット” と “睡眠”.
注意: 常に接続するコンデンサー 100 UF の間 “VMOT” と “GND”. 電解コンデンサーがある必要があります。, タイプではないです。 “低 ESR”, 正に夢中 “+”, モジュール ドライバーに近いことが必要 (数センチを). コンデンサーの電圧, 少なくともする必要があります。 5 ボルトより, モータ電源電圧.
このコンデンサーの不在で, 余分な危険な電圧を作成することができます。, それは USB 通信が失われることを引き起こす可能性, ドライバーが損傷し、マスターにも損傷を与える.
この特定のケースで, 高インダクタンスの存在によって生成される共振現象を避けるために, シリーズで低抵抗電解コンデンサーを使用しません。 (低 ESR), コミューンが、 100 UF, 約 1 オームの直列抵抗. Pololu の警告これらのページを読む:
https://www.pololu.com/docs/0J16/all
https://www.pololu.com/product/1182
確実にすべての電源を接続する必要があります前に. それは線モータをオフに来る場合, または GND をリンク, A4988 ドライバーが破損します。. トリマーを回す場合は、ドライバーの短い, ドライバーはすべて勃発 ’ インスタント. いくつかのケースで彼のチップは爆発し、煙をオフに設定します. Theremino マスターする必要がありますこれらの拷問に耐える, それはテストにそれを置くことをお.
これはないと言うことです。, ドライバーが信頼性であります。. ミスのない場合, 決して休憩.
ただし、ドライバーは常に接続をお勧め, オスとメスのコネクタを, 交換が容易に. 5 または 10 を購入することをお勧めします。, 少しを取得するには’ コモンズ, 価格を下げると.
ドライバー TB6600
Ebay 写真カプラーとの完全な非常に安価なドライバーを買うことができます。. 1 つのドライバーは、します。, つまり、各エンジンの 1 つを使用する必要.
市場にいくつかのモデルがあります。, まったく同様の特性のすべて. このページで述べるのみ TB6600, アドバイスやパターンは、他の多くのモデルにも適用されますが、, 買うことができる TB6560 の例 伊野店.
次の 2 つの画像の TB6600 の表示します。, コンテナーとコンテナーなしバージョンで.
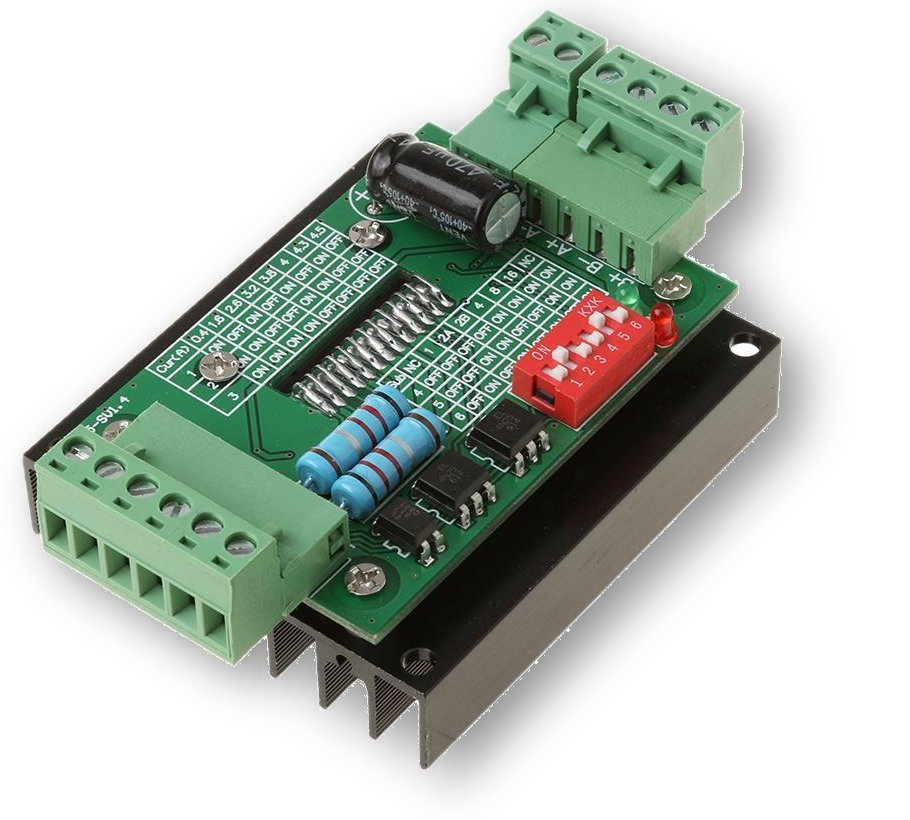

TB6600 ドライバーの特性
- 電源電圧から 9 で 42 ボルト
- 調節可能な電流 4 アンペア
- 内部温度と過電流保護
- マイクロ ステップからの規制 1 まで 32
- 共有正 Photocoupled 入力
- 肯定的な入力に接続するには 5 ボルト
- 入力はトランジスタのオープンコレクターで駆動する必要があります。
モジュールとドライバー TB6600 マスター間をリンクします。
内部的には TB6600 ドライバー (など), 写真カプラーの抵抗を介して正に接続しています。 330 オーム. 肯定的な電圧を使用する必要がそれらを確実にパイロットには、 5 ボルト. マスターの出力モジュール, 0 間の電圧を供給して 3.3 ボルト, これらのドライバーに直接リンクすることはできません。.
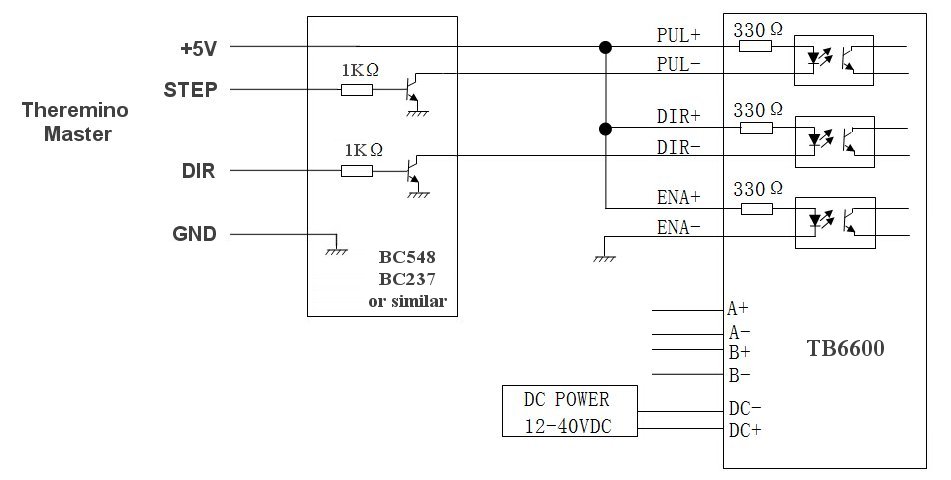
さらに, 写真カプラーは正に永続的に接続しているので, 自分の負の入力からそれらをパイロットと, オープンコレクタ トランジスタでそれらを駆動する必要があります 1 つそれに続く. トランジスタは信号反転, どうして光写真カプラーにマスターの出力信号が高いとき.
いくつかは、より良い、より現実的である以下の絵を理解するかもしれません (送られたアルマンドのおかげで).
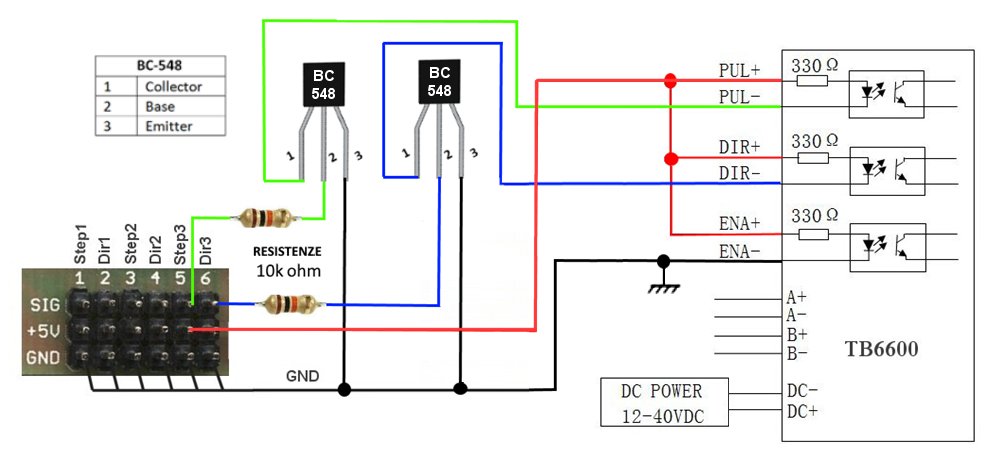
最初のイメージでは、抵抗1Kを使用しました, 私は少しだと’ 浮き沈みと無駄に数ミリアンペア. 駆動する電流が低いので、あなたは10Kまで上昇させることができます. 実際には、あなたはまた、任意の中間抵抗を使用することができます, たとえば、2.2Kのために, 4.7K O 8.2k.
2個のトランジスタと2個の抵抗器, オープン ・ コレクター型アダプターします。. 上で説明したように彼ら自身を接続するワイヤを構築できます。 このセクション, または次のプリント回路基板の このプロジェクト.
どうやらこれらのドライバーもマスター K 入力の出力を接続することによって正常に動作します。- プル-, 電気的ノイズへの耐性に乏しいなるし、手順を失うことのリスクは非常に高いだろうが、.
パラレル ポートでコンピューターに接続します。

パラレルから点火ケーブルを外します, 接続します。 Theremino CNC アダプター, 我々 はすぐに作業を開始. このアダプターは、Mach3 または LinuxCNC に使用できます。 (適切なプラグインを), いっそのこと、, アプリケーションに Theremino CNC, それははるかに使いやすく、します。.
https://www.theremino.com/hardware/adapters#cnc
サーボ制御
アクチュエータ、電源のすべての種類があります。. サーボは、多くのアプリケーションに最適, Theremino マスターのピンに接続します。 (まで 6 同世代の人) または、スレーブのピンに “しもべ” 各 10 まで飛ぶことができます。. 選択します。 “しもべ” 種類としくみをすぐに固定する方法. それらを試してみる, アプリケーション HAL の値の適切な列をクリックします。, マウスを動かすと, 左のボタンを押し.

またマーク TGY930 MG930, それは少なくとも 5 倍の位置決め精度, すべての他のモデルと比較してください。. デジタルであること, についてかなり高い開始の流れと甲高い音をもってください。 400 Hz. その範囲は約 140 度.

HX5010 は非常に強力, 非常に安いが、TGY930 より精度が低い, 費のみ 4 ユーロの価値があるすべての. 遠足 = 200 度.

HTX500 は非常に小さい, かなり正確と格安, もちろん偉大な力を持っているが、それは十分に多くの小規模アプリケーション, 彼は 1 つを完全には 180 度ともいくつかより.


HXT900、TG9e コスト未満 2 ユーロ, 彼らはすべての中規模のアプリケーションに適しています、完全があります。 200 度.

MG958 はモンスター パワーです。 15 Kg/cm とコストのみ 11 ユーロ. 注意それは多くの電流を消費して usb だけそれを養うことができません。. 彼の道: 135 度.
これとよく似た召使は、 TGY-1501 MG, 彼からも 15 Kg/cm, ほぼ同じサイズより容易に利用可能です. 我々 は試していません。 機能は OK.
サーボの主な機能の概要.

これらのサーボは価格のために選ばれました。, 精度と強度からそれらを購入してテストしてきたモデルの多数の中で: www.hobbyking.com (偉大な価格があり、アメリカであるが、短時間で発送)
サーボのための別のアドレスが: www.robot-italy.com ロボット イタリアからはこのリストのモデルではないです。, バージョンは非常に高価と奇妙なだけ, 3 回転からのそれらを含む, 8 回転と継続的な運動. 常にロボット-イタリアからセンサーを見つけることができます。, エンジン, ロボットのグリッパと他の多くの興味深い、ユニークなアクセサリー.
高性能サーボ

–
–
–
これは TGY930 を DS8231 高いパフォーマンスを約束します。, 我々 は試みたが、JR によって生成され、信頼できます。.
http://www.jramericas.com/45190/JRPS8231/
その特徴は、します。: 解像度も 5900 上の手順 120 度回転非常に低いデッドバンド (ビルダーは言う "未提供") 2 つのベアリング間隔最大精度高精度通常使用人の長さよりわずかに高い現在の消費電力のパルス速度制御 250 MHz からループ用軸受 39.1 mm 幅 19.1 高さ mm 34.5 mm、重量 49 グラム トルク 1.26 Kg/cm コスト 70 ユーロ
測定手順とデッド バンド
サーボの精度測定が簡単, ちょうどサーボのディスプレイ アダプターを入れて、長い硬質プラスチック製のチューブを挿入し、 25 十字架の腕一つにセンチ. それ上部のピン、チューブと平行に回すことライン方眼紙に終了表クランプでサーボをクラッシュします。, それに触れることがなく行の上の少数のミリメートルをしながら.
最後に非常に少量を使用して下向きの矢印のしもべを移動し、どのように多くの小さな動きは、すべてのミリにして見られている行で数えることができます。, これらは、 “ステップ”
死者帯の先攻を測定するには、1 つの方法、それが回り出す戻って上向きと下向きの矢印に戻って開始それを見るまで, 矢印が押された回数, 単純計算で, 死んだバンドの幅を示します.
変数と無制限の回転とトルクのサーボ

通常およその回転しているサーボ 180 度, しかし、いくつかのアプリケーションの望ましい無制限回転エンジンになります。. 通常、ステッピング モーターの使用このような場合で, しかし、彼らは欠点を持って.
ステッパーは、複雑なドライバー回路を必要とします。, 加速/減速ランプが必要し、非常に少ないトルク. ステッパーも高速に加速する場合に, 重要なトルクと速度を超える場合、または, 距離を失うし、l を失う ’ ソフトウェアとハードウェアの間の配置.
ステッピングの限界を克服するために, 最も高価な車が連続でモータを使用します。, フィード バック ループとモーター ポジション センサーの外部. 改正公務員で、私たちはまさにそれを得る, なく駆動回路ブリッジ, エンジンの継続のために通常要する. 小型サーボ チップにブリッジ ドライバーが既に存在します。 フィードバック機構が追加されます。, センサーと (光や磁気) ソフトウェア. 最も困難なケースで, PC ソフトウェアの力のおかげで, PID アルゴリズムを追加することもできます。.
簡単な変更は、multiturn で動作させるためにサーボを変更できます。. そのまま使用人に, 制御信号は、クランク シャフトの位置をコントロール ’. 変更後, 信号制御の速度とトルク, 2 つの回転で.
ここではあなたは筆者使用人から得る方法, Servo_16 として構成されているピンに接続されています。.
| 信号 | 強さとスピード |
| 1000 | 最大の力と最大速度時計回り |
| 750 | 半分の強さとスピードを時計回りに |
| 600 | 最小限の力とスピードを時計回りに |
| 500 | 僕はまだ立っています。 |
| 400 | 最小限の力とスピードを反時計回りに |
| 250 | 半分の強さとスピードを反時計回りに |
| 0 | 最大の力と最大速度反時計回りに |
すべてのサーボは、複数ラウンド操作の編集, HXT900 のみのパターンを用意しましたが、. これらのサーボは、多くの利点を持っています。, 低消費電力, USB 給電し、だけ HobbyKing から 2 ユーロのコストすることができます。: HobbyKing.com _ HXT900 (HobbyKing からのご注文を行ういくつかのスタックを取得するとき 10 延長リード: 差出人 30 cm と 差出人 60 cm)
回転速度は調節可能なサーボ HXT900 です。, 約 1分間、数回のラウンドから 80 RPM, トルクは最小値から調整 (少しの努力をすると、すぐに停止します。) まで 1.6 Kg/cm (ピンを止めることはできません。, あなたの指でそれを引き締める).
次の表に、強さと、HXT900 から得られる速度, 通された棒あるいは滑車と直線的な動きで回転の変換.
| メソッド |
Mm 1 回転あたり |
速度 最大 (mm/分) |
強度 最大 (Kg) |
| ネジ付きバー 1 mm/回転 | 1 | 80 | 60 |
| ネジ付きバー 2 mm/回転 | 2 | 160 | 30 |
| ネジ付きバー 4 mm/回転 | 4 | 240 | 15 |
| プーリ径 3.2 mm | 10 | 800 | 6 |
| プーリ径 5 mm | 15 | 1200 | 4 |
| プーリ径 10 mm | 30 | 2400 | 2 |
| プーリ径 20 mm | 60 | 4800 | 1 |
HXT900 の特性を示す 1.6 Kg/cm. その後、HXT900, プーリー 20 直径 mm, 上げることができます。 1.6 Kg. この表の, 安全側にする, 計算しました。 1 Kg.
サーボ HXT900 を変更します。


両側に接着性のラベルを削除します。, 4 本のネジを外します, サーボを開き、3 つの赤い線をカット, 回路基板に近い.


エンジン ボルトを引く, 本社からポテンショメータを行進. バリカンでカット金属タブ, ここでは、はんだ付けワイヤー.


シャフトから 2 つのギアを外し、バリカンですべての内部部品を離れて行う, 回転を防止します。. シャフトが自由に回転することを確認してください。.


上にあるバリカン 2 歯で切る ’ 大きいチェーン リング.
スレッドの場所ラウンド アバウトのポテンショメータ. ピンの歯車をすべり, 最小から始まってください。. すべての歯車は、大きな下で行く, エンジンに向かって. L ’ 大ギア, エンジン ボルトをもたらします, あまりにも押す必要がないあります。, しかし、他の歯車に近い取得するだけ, それらに触れることがなく.


L ’ 左の画像は回路図と機能, 右上の 1 つは変更され、抵抗器を配置する場所を示します.
2 つまたは 3 つの小さい面実装抵抗器を追加します。 (0603), 指定しました。 (それらを拡大する画像をクリックします。)
また、HXT があります。 900 ここに示されている別の回路で. このファイルでは、スキームと私たちが見つけることができるすべての情報. 残念ながらデータシートは、中国: uploads/files/HXT900_Type2.zip
最後にエンジンを閉じるしを試してみる.
HXT900 以外のサーボを編集します。
既存のサーボのすべての種類のための指示を提供するためには不可能します。. このファイルでは、すべての情報, スキーマとデータ シート, これまでのところを集めました: uploads/files/ServoInfoAndDatasheets.zip
複数ラウンド型商業使用人
最後に、メーカーはこの可能性を発見しました。. Pololu のカタログには既に 4 つのモデルが存在しています。, 価格で 5 ユーロまで 15 ユーロ. 次のリンクを示しています最小, しかし、このリンクから, Pololu の全体のカタログを探ると, エンジンだけではなく:
http://www.pololu.com/product/2820
通常のサーボと multiturn の動作原理
使用人の各モデルとは異なる機械的および電気的, しかし、原則は、すべてのサーボに同じ: uploads/files/ServoCircuitsAndTimings.zip
標準的なサーボの操作.
- 信号 0.5 で 2.5 Ms, サーボ チップに変換されます。, 範囲値で 0 3 つのボルトで.
- サーボ内部の小さなポテンショメータ (に応じてどのようになって), それはまた彼から値を提供します。 0 で 3 ボルト .
- 2 つの電圧が等しい場合, エンジンにチップ電圧ないです。.
- 2 つの電圧として互いから逸脱します。, モーターより多くの力によってチップ.
- 方法でモーターへの電圧を与え, または反対の方向で, かどうかによってより高い電圧または他.
サーボの複数ラウンド操作.
- ポテンショメータは 2 つの固定抵抗器に置き換えられます, 彼のレース中は常にポテンショメータをシミュレートします。.
- 他のすべては、通常のサーボと完全に同じです。.
- コマンド信号が半分の場合 (1.5 Ms), 2 つの電圧が等しいチップはモーターに電源を供給しないし、.
- 2 つの電圧として互いから逸脱します。, モーターより多くの力によってチップ, 1 つの方法または他.
どのくらいのパワーをエンジンに送信?
- しもべの中のチップが「反応コンポーネント」として機能します。.
- 反応は「標準」または「フィードバック」のクローズド ループ サーボで生じる.
- 複数ラウンド型使用人でそれは簡単な反作用または「ラグ」.
- 両方のケースでは、反応曲線です。.
- 応答曲線, 制御信号によって (2 つの電圧間の偏差), モーターに電圧を決定します.
- 応答曲線中心のフラット スポットで"S"の一種であります。.
- 曲線の傾き (反力) 抵抗によって規制されて.
- センターでフラット スポット (デッド ゾーン) 第 1 の抵抗器を使用して調整します。, その幅を決定します。.
- 理論的には良い反応と短いデッドゾーンの多くを持っていること, 誇張することはできませんが、.
- 反応パラメーターを誇張する場合, エンジンはよりしっかりした、激しくスイングする得ることができるも.

ブラシレス サーボモータ


モーター ブラシの有無があります。, すべての種類の, について最大重量の数グラムから始まってください。 10 KW の電力
カタログで: 偉大な価格と最大電流でそれらを操縦するコント ローラーとモーターを見つけることができますを www.hobbyking.com 300 Theremino システムの標準的な信号とアンプ.
それぞれに “スレーブ” 型の “しもべ” 最大 10 個の独立したモータを制御できます。.
写真を 6 キロワット (125 アンペアで 48 ボルト) ブラシレス モーターの小型コント ローラー.
選択したエンジンの最も興味深い例の一部
HobbyKing が変更されたカタログ. 選択したエンジンのリンクを変更した、我々 は壊れたリンク求職公開する場合私たちを罰するために、私たちにとっては問題.
またカタログ HobbyKing がわかりにくくなっています。, 電源用エンジンを注文できない理由. 我々 が行うことができます最高ですモーター アウトランナーブラシレスモータの最初のページを指摘, サイズ順:
https://hobbyking.com/en_us/electric-motors-1/size.html
エンジンのコント ローラーの例
コント ローラーから 6 アンプ. ブラシレス モーター用 (ブラシレス) – について 6 ユーロhttp://www.hobbyking.com/hobbyking/store/__4318__TURNIGY_Plush_6A_8bec_6g_Speed_Controller.html
コント ローラーから 25 アンプ. ブラシレス モーター用 (ブラシレス) – について 8 ユーロ
http://www.hobbyking.com/hobbyking/store/__11616__Turnigy_AE_25A_Brushless_ESC.html
コント ローラーから 20 ブラシ モーター用アンプ (起毛) – について 3 ユーロ
http://www.hobbyking.com/hobbyking/store/__9090__Turnigy_20A_BRUSHED_ESC.html
コント ローラーから 30 ブラシ モーター用アンプ (起毛) – について 6 ユーロ
http://www.hobbyking.com/hobbyking/store/__6468__Turnigy_30A_BRUSHED_ESC.html
カタログ Pololu のモーター
このリンクをお勧め, Pololu の全体のカタログを探ると, エンジンだけではなく. Pololu から DIY のためのすべて.
http://www.pololu.com/category/22/motors-and-gearboxes
カタログ Solarbotics モーター
またここではモーター (メーカーに他の有用成分). コストは高く, すべての今して一見の価値が, このカタログでも:
https://solarbotics.com/product/gm2/
https://solarbotics.com/catalog/motors-servos/gear-motors/
注意: 非表示の広告を提案するかもしれない商業企業へのリンク, そのためそれを指定する必要があります。: 誰も返済されていないと我々はここで上場企業のいずれかで単一の電子メールを交換したことはありません. だから我々 は誰よりも善悪について話をして、 “ショッピングのヒント”, 彼らはちょうど有用な情報, コンポーネントの研究中に得られました。.
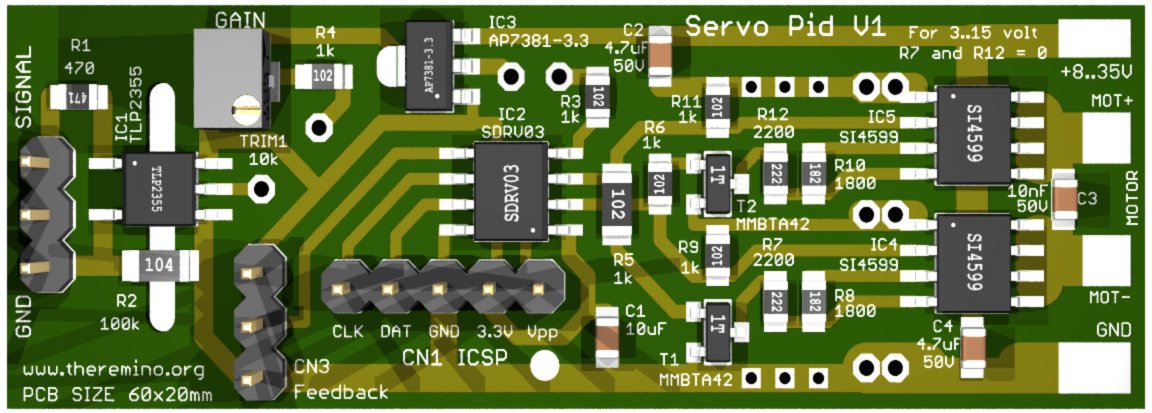
ServoPID
このモジュールは、50ワットのDCモータを制御することができ、Hブリッジであります (数アンペアと30ボルト以上になるまで) そして、サーボモータに変えます.
私たちは、eBayのMaxThereminoのメーカーや販売者に感謝します, 容易にこのプロジェクトのために、プリント回路基板およびキットを用意しています. フォロー eBayでMaxThereminoリンクの 彼はそれらを持っていた場合は、まだ彼はそれらて送信を持っているカタログ書きます.
コンポーネントのみを購入し、PCB技術を印刷することを好む人はDIY, これは、圧縮されたファイルにこのモジュールをビルドするために必要なすべてのファイルを配置されます.
イーグル形式の回路基板, 画像, LTSpice と方式のシミュレーション:
ServoPID_V1.zip
制御信号は、古典的な信号であってもよいです “しもべ” または “PWM”, モジュールから来ることができます マスター, 一つ IotModule, から、 アセンブリの名前, あるいは模型飛行機用のリモートコントロールから.
Hブリッジは、マイクロコントローラPICによって制御されます, 私たちは、さまざまなニーズに合わせて準備していることをファームウェアでプログラマブル. 最も単純なケースでは、前方または後方にモーターを実行しています, 速度を調整します. より複雑なケースで位置を測定するためのポテンショメータを使用し、PIDアルゴリズムで位置を調整.
ポテンショメータおよびPIDで、それは古典の同じ操作を持っています “しもべ” しかし, 異なり、市販のサーヴァント, あなたは、各パラメータを変化させる可能性を持っています, Mortaエリア, ADCの測定分解能及びPID係数.
通常とは異なり、サーボ入力信号はフォトカプラで単離します. これは完全に制御PCのことから、モータ電源回路の塊を分離しておくことができます. これは根本的に誤動作を引き起こす可能性があり、電気的な干渉を排除します.
配線
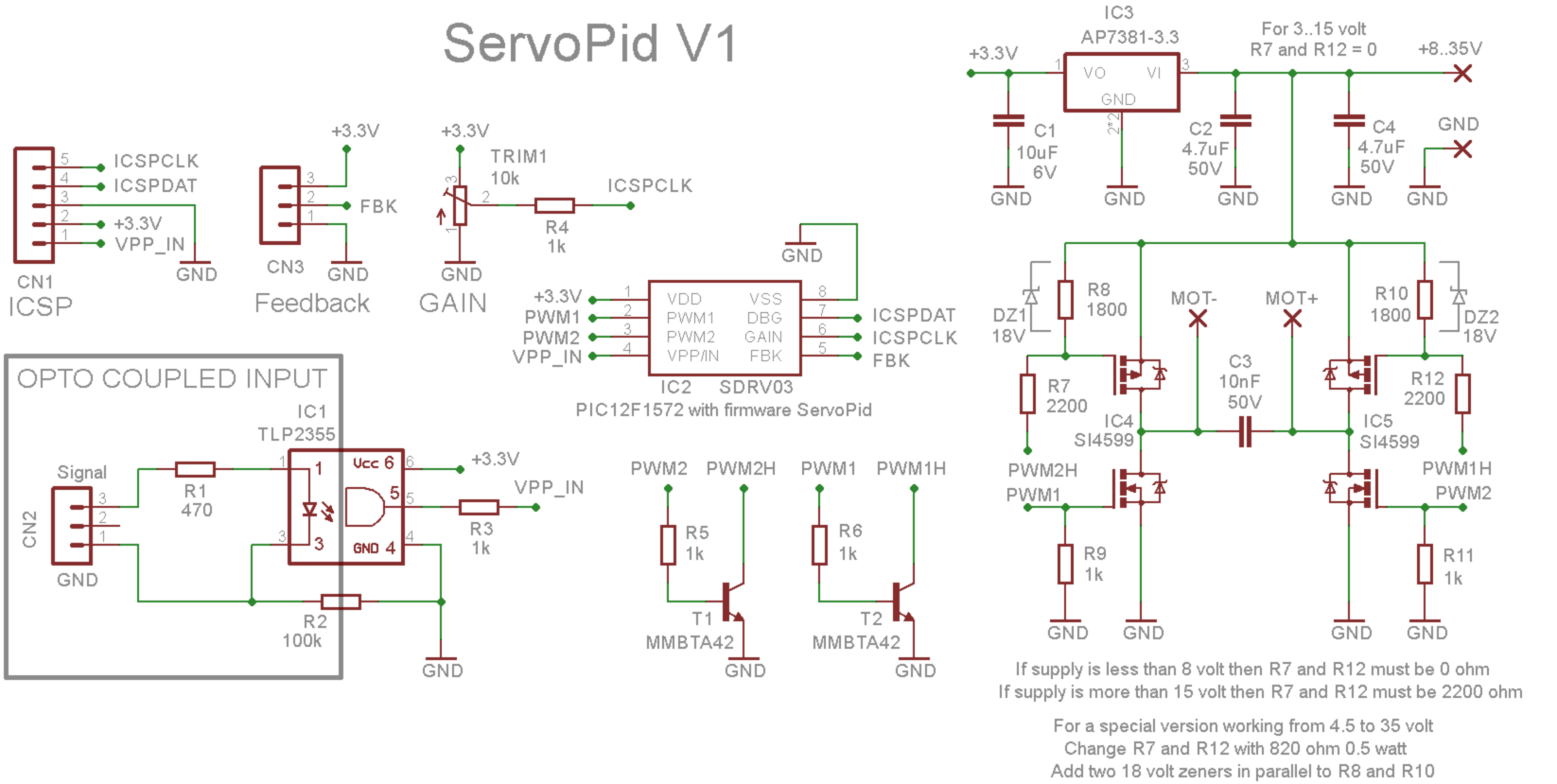
制御信号, サーボ型やPWM, これは、コネクタCN2に接続されています, R1を介してフォトカプラの数ミリアンペアとパイロットにLED電流を制限します.
制御信号の振幅からでなければなりません 3 で 6 ボルト, 正パルス時間は間でなければなりません 500 で 2500 私たち (について), とから繰り返し率 50 Hz に 500 Hz.
制御信号は、フォトカプラIC1を介して継続します, R3を通って、ピンに到着 4 マイクロの, これは、高分解能で時間を計測し (マイクロ秒の30秒).
コネクタ “ICSP” 制御ファームウェアでPICをプログラムするために使用され、また、デバッグのためにUSBシリアル変換器を接続します. 次のセクションを参照してください “ファームウェア”.
あなたはPIDを使用してファームウェアを設定する場合, その後、コネクタ “フィードバック” これは、位置測定ポテンショメータに接続する必要があります. 通常、このポテンショメータは、厳格に出力軸に連結されています, 減速ギヤやベルトを介して駆動軸によって移動されます. フィードバックポテンショメータもマルチターンすることができ、リニアポテンショメータでなければなりません, 通常の間の値を持ちます 1 k オームと 10 k オーム. ポテンショメータの中央には、中央のコネクタに接続する必要があります, 図中の線材には名前がありFBK.
フィードバックが逆に行われた場合には、あなたはそれらの間にポテンショメータの両サイドの接続を入れ替えることができます. しかし、中心は常にFBKに接続しなければならないことに注意してください. あなたが失敗した場合、ポテンショメータは、加熱して破損する恐れがあります.
それトリマー “利得”, これは、手動でPIDのゲインを調整するのに役立ちます, それは新しいエンジンのテストの間に、主にいくつかのファームウェア構成でのみ使用し、, PID値を微調整します. 抵抗R4は、ICSPCLK信号からトリマーを分離します, あなたは、シリアルでデバッグするためにICSPCLK信号を使用することができますので、.
電圧レギュレータ “IC3” の電圧を作成します 3.3 ボルトは非常に安定しました. この電圧は、マイクロコントローラを供給する, ポテンショメータのフィードバック, トリマーとフォトカプラIC1 QTR1.
PICの2つの出力信号, 名前を持つとPWM1 PWM2, MOSFETは、チップSI4599に含まれる4で形成されたフライブリッジ. ブリッジは、PWM信号の高周波数で閉じられています (通常 16 または 32 KHz), これは、エンジン回転数を調節し、それが一方向または別に回転します. 転流時にはPICは、ブリッジの二つの枝が同時に閉じることはありませんされることが保証されます (これは短絡だろう電源).
電源電圧は、エンジンに適合させなければなりません, それが多すぎるとモータが焼損することがあり. スキーマに変更を加えない場合の電源電圧を使用することができます 8 で 35 ボルト. 図が示す修正は、他の2つの電源電圧範囲を可能にするために行われるべき. 最初の範囲 (差出人 3 で 15 ボルト) それだけで短いR7およびR12に必要です. 第二範囲 (差出人 4.5 で 35 ボルト) これは、2個のツェナーダイオードを追加することもR7およびR12を交換する必要があり、 18 ボルト.
ファームウェア
プログラマPicKit2を接続ICSPコネクタで (参照してください。 このページ). なお、ファイルPK2DeviceFile.dat, これはまた、このプロジェクトで使用されるPIC12F1572を含み, それはPicKit2に対してのみ有効です。. だから、最も可能性の高いPicKit3で、このPICをプログラムすることはできません (あるいは少なくとも、私たちはあなたを表示する方法がわかりません).
あなたはこのセクションの最後にダウンロードしたZIPでは、ファイルを検索します ServoPid35.hex すでに完了してPicKit2とPICで書かれる準備ができ.
このファイルには、最もシンプルなバージョン管理であります. 二方向に最大移動に最小から可変速度モータ制御信号を変化させることにより. 中心位置に制御信号が、モータが停止します.
SERIALファームウェアからデバッグデータを送信
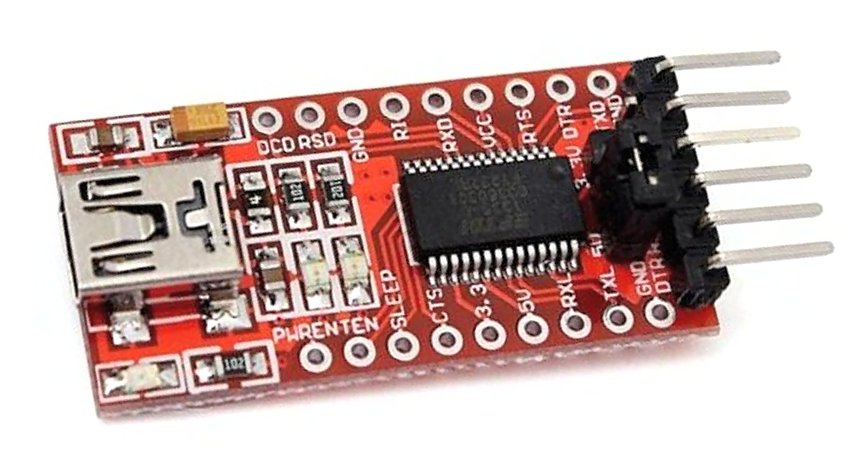
ワイヤICSPCLK ICSPコネクタはシリアルラインにファームウェアからデバッグデータを送信するためにも使用されます. それを使用するには、このようなこの画像に見られるものとして、シリアルUSBコンバータのGNDとRXピンにGNDとICSPCLKを接続する必要があります.
その後、シリアルデバッグに値を送信するためにファームウェアを変更します, アプリケーションでデータを受信します ターミナル そして、必要に応じてそれらを表示します SignalScope 我々のシステムのあるいは他のアプリケーション.
EDITして再コンパイルTHEファームウェア
動作パラメータを変更し、最も複雑なバージョン管理を実装するには (フィードバックとPIDとの位置制御) あなたは、ファイルを編集する必要があります ServoPid35.bas そして、再コンパイル. コンパイルは、ファイルを作成します HEX それはPicKit2とPICに書き込むことができます.
私たちは優れたを使用することをお勧めしますファイルを編集するには FineLineIDE そしてコンパイルします ProtonCompiler.
どちらも、彼らは自由であり、あなたは以下のリンクからダウンロードすることができます:
www.protonbasic.co.uk/content.php/2077-FineLineIDE
www.protonbasic.co.uk/vbdownloads
ファームウェアを変更するための命令と有益なコメントは、ファイルに記載されています ServoPid35.bas そして、ファイルの最後に、あなたは、PIDパラメータを調整するステップ命令で使用される用語やステップの用語集を検索します.
これは、複雑なファームウェアであり、それは簡単にすべての適切な方法でそのオプションを習得して使用することができません断っておきます. 最も難しい部分は間違いなく回避発振するために、PIDパラメータを調整すると同時に、迅速な対応と小さなダイ面積缶を取得しています.
私たちは、PIDパラメータの調整を容易にするために、私たちのベストを尽くしました, ツィーグラー - ニコルス法を使用して、さらにそれを簡素化. また、この方法のいくつかのエラーを修正しました チーグラー・ニコルズは、ウィキペディアに公開しました, 新システムのためのパラメータの設定が、 (エンジン, 削減とフィードバック), これは、専門家による操作のまま.
ファームウェアに関する注意事項
MOSFETの消費を減らすには、ファームウェアのPWMの周波数を低く設定することをお勧めします。. 通常、周波数はに設定されます 20 KHzですが、一部のアプリケーションでは、 2 MOSFETの加熱問題を実質的にゼロに低減するKHz.
唯一の禁忌は少し増加するノイズです. したがって、PWM周波数を下げてから、ノイズの増加が許容できるかどうかをモーターに確認してください。.
ダウンロードファイルファームウェア
以下では、ZIPファイルを検索します:
– 簡易版オープンループでPICをプログラムする準備ができてServoPid35.hex.
– FineLine IDEで編集し、再コンパイルするServoPid35.bas
ServoPid_Firmware.zip