
離れCapSensorセンサー
センサーは、導電性オブジェクトをすることができます。, でも非正規形, 単純な銅やアルミ プレート, アンテナ, 電気技師のワイヤや銅の粘着テープを使ったセンサー.
センサーを接続する必要がありますを刻印する “センサー” CapSensor フォーム, 非シールド線とは非常に長い (数センチから数十センチでほとんどへから)
マークのピン “GND” 緩んでいるか、メジャーを安定させることができるいくつかのケースでの参照の金属塊に接続させることができます。, ノイズを低減させ、最大有効容量. 参照質量をワイヤで接続する必要が. ワイヤ接続をもはや数十センチ以上にする必要があります。. 質量ないセンサーを直面している必要があります、またはそれ以外の場合もセンサーの容量を増やすだろうし、範囲も少なくなりますのでそれに近すぎます。.
数センチから 1 メートル以上センサーの表面があります。. 数メートルの範囲を取得する大規模なセンサーと, 小さなセンサーの範囲は数センチに減少します。.
センサーとの接続線は、金属部品、電子回路から置かれなければなりません。, それが阻害されます。. 通常観察する距離が所望の動作範囲に匹敵します。.
あなたは、同時により多くのCapSensorを使用する場合は、そのセンサは、それらの作用半径に匹敵する距離だけ互いに離れている必要があります. 近すぎる取得する場合, 互いに影響することがあります。. かどうかは、rivetted を確認できます。, その周波数が等しいかチェック (HAL プログラムのピンの特性の周波数を読み込む). コンデンサー 15 pf を適用することができます 2 つの隣接するセンサーの影響を防ぐために (NPO 法人) GND とセンサーの端子間, それらの 1 つ (2 つだけがある場合), またはすべての奇妙なセンサー (多くがある場合)
操作CapSensor

操作は呼ばれる最初のメジャーをに基づいてください。 “校正” 安静時のセンサーの機能の値を格納します。.
後 l ’ 任意の導電性のオブジェクトのアプローチ, 手や金属のオブジェクト, 非常に小さい量センサーとオブジェクト間の距離に比例するセンサーの能力を増加させる.
ADC の低ノイズ FET を使用してください。 24 奴隷CapSensorタイプのビットは正確に非常に小さな静電容量の変化を測定することができます, 1 よりも少ない、ピコファラッドの 1000 分, 非常に正確で安定したデジタル値に合わせてソフトウェアを提供.
計測ソフトウェア, HAL のプログラムであります。, 調整値を考慮, 寄生容量および領域をバインドする物理法則, 距離と電気容量, かなり直線距離値に生データを変換する非常に複雑な計算をします。.
CapSensorはあまり正確で超音波センサの以下の直線距離であるが、独特の特性を有しています, 何らかの方法でことができない距離尺度が徐々 に自然 “スキップ” 2 つの値の間.
gradualnessとCapSensorの応答速度は、他のセンサと得られません. のみCapSensorであなたはより簡単で楽しい方法でサウンドやビデオを駆動することができます.
HSのバージョンはすぐに手を動かしたときに高速な応答を生成し、ファームウェアの小さな変化を除いて同一であります. このプロパティは、テルミンを演奏する人によって享受されます.
シャープな赤外線距離センサー
これらのセンサーは、赤外線を使用して, 三角測量の方法でレンズとセンサーとターゲット間の距離を測定非常に狭いビームに平行.
詳細ページを参照してください。: ハードウェア/センサー/シャープ-センサー

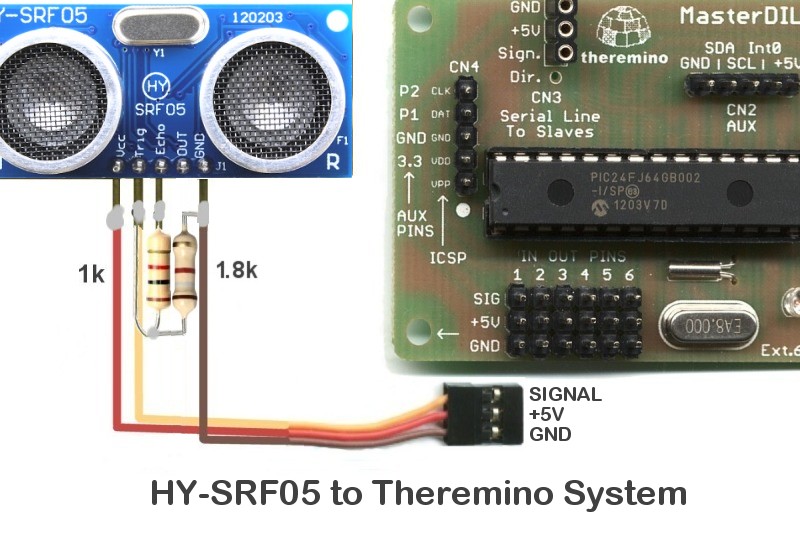
超音波距離センサー

いくつかのマイクロ秒に至るこのモジュールによって生成される時間の正確な測定のため 30 Ms は、あなたの pin を使用する必要があります。 “Usound_sensor” マスターまたはピンのすべてのピンで利用可能 9 モジュールの “しもべ”.
マスターを使用している場合, PIN を変更する必要がありますを無効にする前, Usound_sensor のような別のピンを構成する前に.
確かにすべて ’ ワイヤの順序, モジュール型の差は何です。 “Srf05” Theremino システムの標準的なコネクタ.
SRF05sensor: 信号 GND + 5 v Theremino: GND + 5 v の信号
このモジュールも、消費します。 4 しかし, USB から電源をもつ Theremino の多数を接続できます。.
我々 は、SRF05 を試してみました, SR シリーズのすべてのセンサーが, 問題ないはず. 購入する前に、確かに普遍的なインターフェイスを持っています。, 特定のインタ フェースではなく、, たとえば、システム “グローブ”, シリアルまたは I2C. また信号と電圧が SRF05 と同じであることを確認します。.
詳しい情報はこちら:
Srf05: http://www.robot-italy.com/en/low-cost-ultrasonic-range-finder-1.html
SRF04: http://www.robot-italy.com/en/low-cost-ultrasonic-range-finder.html
– – – – – – –
新しいセンサーが安い, HC SR04
このセンサーは下に 5 ドルのために eBay で, 送料込, それらとほぼ同じ特性を持ちます 20 ユーロ.
我々 はそれをテストしより悪いのです。 “Srf05”, より安定, ないと、正しい距離と最大の間でバウンス 3 メートル.
HC SR04 のそれ以上の問題は、三角とエコーの個別のリンクをしています。. なぜあなたは低い出力電圧から抵抗分圧と共にそれらをリンクする必要があります。 5 3 ボルトのシステム Theremino 3 ボルト. リンクを使用してのみトリガーします。. (拡大画像をクリックします。)

2 つの抵抗のこの変更のテストが完了し、正常に動作. 記載されている以外の値の抵抗器を使用しないでください。. 2 つの抵抗との関係を維持する必要があり、登るべきではないあまりにも多くの抵抗. (せいぜい 1.2 を使用できる 2.7 2.2 1.5 k と k と k または k) ここでは、あまりにも多くのおかげでマウロをテストで主張しているそれを動作させるための.


HC SR04 を知らせてありがとうマウロ ラファエラと ’ アプリケーションの女神 “レーダー”
最初のバージョンのビデオ: http://www.youtube.com/watch?v=Yw1YPpPC9Ww
ThereminoRadar バージョンのビデオ 1.2: http://www.youtube.com/watch?v=FsW4qwXvpB4
マウロ ロボット ブログのプロトタイプの詳細について: ブログ/ロボット、cnc
TheremioRadar をダウンロードします。: ダウンロード/オートメーション * レーダー
– – – – – – –
更新、 2021
HC-SR04はうまく機能せず、機能するときにすでに感謝すべきことがあります, 多くはうまくいかないので. 多くの企業がそれらを互いにコピーし、コピーするたびにいくつかのコンポーネントが間違っています, 蓄積されたエラーのために、それらはもうほとんど機能しません.
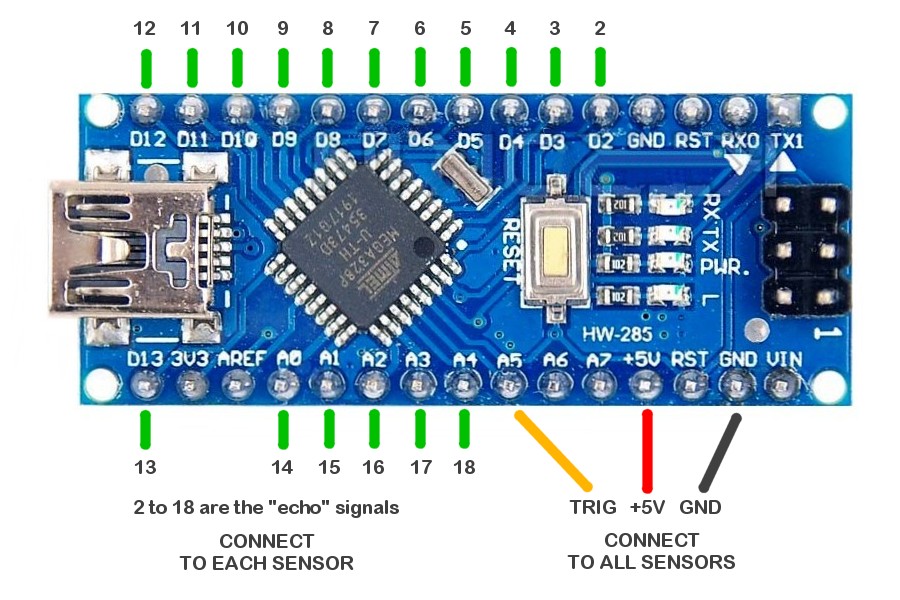
したがって、代わりにHY-SRF05を使用することをお勧めします (安いも), 次のスキームに従ってそれらを接続します.
すべてのセンサーの一般的な特性
測定距離します。 1 cm に 4 Mt
ビーム幅約 30..50 度.
当社のファームウェアの解像度については 0.1 mm の超音波センサーが、, 最高の最高の環境, mm に該当しません。.
注意: 最大距離は常にアクセス可能ではないです。. すべての超音波距離センサーは、全体を持っている十分なとなる障害物や信号の反射によって簡単にだまさ. 実際の精度は多くの要因に依存し、完全に間違って得ることができるいくつかのケースで. これは、超音波検出法に固有の弱点には Theremino システムのモジュールの任意の欠陥原因. 正確な測定を行う赤外線距離センサーを使用する必要があります。 (シャープ), またはレーザー技術を持っている人はさらに良い.
ビーム幅を減らす
L ’ 超音波ビームの幅は約 60 ° (赤の曲線), 30 ° を簡単に減らすことができますが、 (緑の曲線), サイドローブの完全な除去と, 柔らかい素材の 2 つの管で突き出るについて 10 センサーの上を越えて mm.


元記事と減衰特性:
http://www.robot-electronics.co.uk/htm/reducing_sidelobes_of_srf10.htm
超音波センサーを改善する
すべての超音波センサー, 最高でも, 時々彼らは信号を失います. 反射によって破壊的な干渉が発生し、測定された距離が突然別の測定値にジャンプすることがあります. この問題は無線信号に似ています, 特定のポイントで不足するポイントにフェードします. そして、私たちが見つけたソリューションは、WiFiで使用されているものと同じです, つまり、アンテナを2倍または3倍にします.
今まで (の初期の数ヶ月 2021) 超音波は宿題には使えないと確信しました “繊細”, アプリケーションの使用など ビデオ プレーヤー ビデオを前後にスクロールするには, 訪問者が壁の絵に近づいたとき. その後、, 速度を落とすための安全で信頼できる方法を探すとき COBOT 人間が近づくとき, センサーの数を増やしてみました.
結果は驚くべきものです, すでに2つのセンサーがありますi “ジャンプ” それらはほぼ完全に消えます. そしてセンサーは数ユーロかかるので, 3つまたは5つでも使用できます, したがって、非常に高い信頼性と完全に安定した信号が得られます.
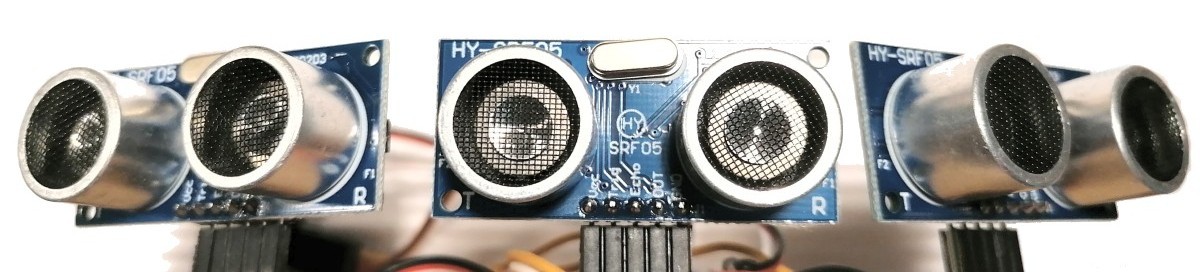
複数のセンサーを使用する (そして私たちが書いたファームウェアは最大 17), また、敏感な領域を拡大するためにそれらを配置および指示することもできます. したがって、訪問者は横から来ても聞くことができます, またはそれが私たちのもので起こる可能性があるので後ろからでも COBOT.
私たちのファームウェアを使用すると、最も貧弱で最も欠陥のあるセンサーでさえ復活させることができます (HC-SR04), そうでなければ完全に信頼できないでしょう. 安価で高品質のセンサーを使用することをお勧めします, つまり、HY-SRF05.
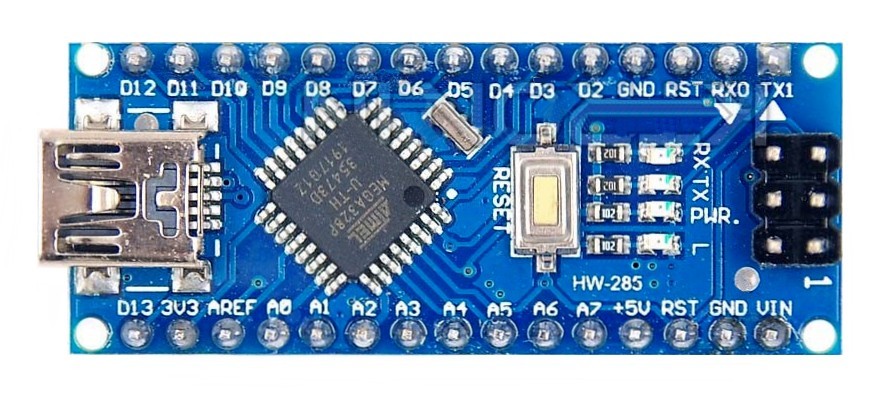
多くのセンサーを接続するには、多くのピンを備えたモジュールが必要です, おそらく安くて小さい, 基本的にArduinoNANO (パフォーマンスが優れているCH340を備えたものを探します).
私たちが書いたファームウェアはとてもいいです, まで読みます 17 リターンエコー信号用の入力ピン. の洗練されたメカニズムを使用することにより、最高の精度と信頼性を実現します。 “変更時に中断” すべての入力ピンで、欠陥のあるサンプルを特定して修正することもできます.
結果として得られる単一の信号は、最も近いオブジェクトのミリメートル単位の測定値です。.
このシステムを機能させるには、次のものが必要です。:
– ArduinoにThereminoライブラリをインストールします (まだない場合)
– ArduinoエディターでTheremino_USOUND.inoファームウェアをロードします
– 使用するPINを選択してください (FirstEchoPin e LastEchoPin) エリア内 “初期化”
– ナノを接続する, 適切なCOMポートを選択し、プログラムします.
– ArduHALアプリケーションを開き、PINが表示されることを確認します (おそらく読む このページ)
– 最初のPINを設定します (ピンゼロ) Gen_in_floatが来る
次に、最初のピンをダブルクリックします, HALの小さなオシロスコープが開き、システムが正常に機能していることを確認できます。, センサーの前で手を動かす.
ファームウェアとソフトウェアをダウンロードします
ダウンロードするZIPファイルには、ArduinoNanoのファームウェアが含まれています, ArduHALアプリケーションとThereminoライブラリは、USB経由でArduinoNanoをArduHALアプリケーションと通信します. ArduHALの説明を このページ.
ダウンロードdiTheremino USOUND
Theremino_USOUND.zip
すべての Windows システムの 32 と 64 ビット. ラズベリー pi, Linux, アンドロイドと OSX, 読んで、 インストールに関する注意事項.
静電容量式のキーパッドと近接センサー


CapTouch 型ボタンにリンクします。 “ピン” 電線、プリント回路基板の鉛システム Theremino, PinType としてを選択します。 “Cap_8”, または “Cap_16”. 詳細については、ThereminoMaster モジュールとアプリケーション ThereminoHAL のマニュアルのデータシートを参照してください。.
各キーは、導電性材料のプレートで構成されています. 血小板は通常サイズを指で触れられるが、非常に小さくすることができます。, 非常に大きいとか, たとえば、, ピアノや花の花びらのキー.
上側のプリント回路板維持、銅を使用する場合, それはキーのデザインが印刷された用紙のシートとすべてをカバーして、最終的に防水ときれいに簡単にサーフェスを取得する透明なプラスチックの薄い板を.
カーソル “スライダー” フォームと仲直りして “マルチ三角” 縦方向でも横方向の動きに非常に低感度の動きに敏感であります。 (三角形の形状は複雑なマイクロ チップのソリューション以上の私たちのマルチ改善です。, 少し線形, 少ない真のような動きに答えた “スライダー”)
2 つの軸の役割を果たすコントロール, マウスのような, 4 つのプレートを必要とします。 “マルチ三角” 4 つの方向と X の 2 つの軸で 4 つの値を作成する特別なソフトウェアで暴動の Y と Z 軸を表す高さ/.
CapTouch 技術はまた古典を置き換えることができます。 “近接センサー” 広く工業用制御ではなくより少ない費用, ’ 任意の形状と調節可能な感度のホット スポット.
– 紙製又はプラスチック頻繁多くミリメートルの 1 つの層を介して動作します。
– 線はかなり長いと上映できませんする必要があります。
– ボタン ラジオに苦しむしません。
– 高速応答があります。 (数ミリ秒)
– 跳弾を生成しません。
– あまり機械的ボタンを原価計算
– l を苦しまない ’ 湿度
– 型の奴隷 “しもべ” それは直接 8 つを読むことができます。 (ピンの 1 つ)
– クロス オーバー テクニックまで読むことができます。 36 1 つのスレーブ ・ モジュールのタイプとキー “しもべ”
小さな距離の静電容量式近接センサー
これらのセンサーは、容量性技術を使用してください。, 以前の CapTouch と CapSensor のような, 機能が 型の “オンまたはオフ”.
ここで提供されるセンサーは以前の問題を与えていた. MTCH101 チップのデータ ・ シートを我々 が放棄している宣言された特性に応じて動作していません。.
したがって、eBay でいくつかのユーロのために見つけることができます TTP223 とアマゾンを代わりに使用することお勧め.
電源電圧
、 5 USB から来ているボルトは非常に安定していないと、このセンサーが誤動作 (少しだけでも). また、それを供給 5 ボルト, 出力になります 5 ボルト セキュリティ マスターを送るだろうと. 出力信号を下げる必要がありますし、 5 ボルト 3.3 ボルト, 分周器 2.2 信号をクリックしからの抵抗と直列に k 4.7 地面に k. なぜお勧め このセンサーをフィード、 3.3 マスターによって安定化されたボルト.
機能
- 金属表面の検出距離 10 センチまで. ヨハネの黙示録の飛距離を得るの敏感な部分の面積を大きく (領域のすべての平方センチメートルに約 1 センチ).
- 標準的なピンに接続されている必要があります。, DigIn として構成.
- 安定した電圧を供給する必要があります。, だからそれは良いリンク 3.3 いくつかのマスター シェイプの Pin で使用できるボルト.
このソリューションの利点
- ピンに 3 本のワイヤーを接続することができ、3 つの鎖は非常に長くなることが, でも数十メートル.
- デジタル端子へ接続します。 (DigIn) その後、すべてのピンが有効と (12 マスターとスレーブの使用人に 10)
- CapSensor より安い.
光センサー
多くのタイプの光センサー, フォト ダイオードやフォトが簡単にシステム Theremino の標準入力に接続されています。.
詳細ページを参照してください。: ハードウェア/センサー/光センサー



エンコーダー
エンコーダーは、ピンの角の位置を読み取ります, ポテンショメータとして, ラウンド数は限られているが、.
小型ポテンショメータ エンコーダーに似ています (最もよく知られている、ケンタッキー-040 次の画像の). これらのモデルは機械的であり、提供 18, 20 または 24 回転あたりのパルス, コンス トラクターによって. これらのパルスから得られたファームウェア 72, 80 または 96 1 回転の角度の位置.
他のエンコーダー, 磁気または光, 回転あたりのパルス数が非常に高いがあります。 (600, 2400 を超えて). 彼らとあなたはピン型エンコーダーによって許可される最高速度を超えないように順序で回転速度を制限する必要 (について 10 マイクロ コント ローラーはオーバー ロードされた kHz とも小さい場合です。).


2 つのフェーズ, ここ CLK と DT, Encoder_A と Encoder_B として構成されているピンのペアへのリンク. 回転の方向を逆にする 2 本のワイヤを交換.

機械式エンコーダーは、余分なまたは不足しているパルスを簡単に生成できます。, 接点のバウンス. エンコーダー ケンタッキーの機能を改善するには-040 写真に示すように, お勧めします。:
- 交換してからの 2 つの面実装抵抗器 10 K ω, 2 つのコンデンサーを 100 NF
- Encoder_A_Pu と Encoder_B_Pu の 2 つのピンを構成します。
- エンコーダーに接続しないでください、’ 5 ボルト, または 3.3 ボルト, マスターのピン
- 端子を接続します。 “+” で “GND” (2 つのコンデンサーを地面に)
このソリューションについて供給電圧供給すべてを心配する必要がないという利点があります ’ エンコーダー.
2 つの 10 k 抵抗で元のスキーマを使用する人, 提供するために世話をする必要があります、 3.3 ボルト (ない、 5 ボルト) 端末に “+” エンコーダー. 2 つのコンデンサーを追加する必要があります。 100 NF. 最後に、Encoder_A と Encoder_B のようなピンを構成する必要があります、 (なし “Pu”).
光や磁気エンコーダー
一般的に非常に高い革命あたりのステップ数を持っている光や磁気エンコーダー. したがって、力学を慎重に計画する必要があります。, 数 KHz のピン型の制限を超えることはないので “エンコーダー”.


高速度と精度を必要とするアプリケーション アダプターを使用する必要があります。 1 つのイメージに示すように. これらのアダプターで周波数をカウント最大上昇に約 1 MHz, しかし割合でもコストが上がる. 商業的なアダプターのコストについて 50 各軸のユーロ. 代わりに Theremino マスター, 車軸あたりのコストは約 2 ユーロ.
多くの光学式エンコーダーを供給する必要があることに注意してください。 5 V とから、出力信号の範囲 0 で 5 ボルト. その後、マスターの入力の最大電圧を超える. 克服するため、 3.3 ボルト マスターは害はありませんが、USB との通信を失う ’ を押し “認めるもの” それらを再起動するには. 直接の出力信号の場合のみを接続することができます ’ オープンコレクター エンコーダーは、. それ以外の場合は次の 3 つのソリューションがあります。:
1) 各信号と直列に 100 k 抵抗が介在します。 (マスターに近い) 入力プルアップせずに設定して (_ なし Encoder_a pu).
2) 各信号線にダイオード 1N4148 が介在します。, 方の襟付き、’ エンコーダーとプルアップと入力の設定 (Encoder_a_pu).
3) 入力を使用します。 7 と 8, 信号を容認 5 ボルト. これは、クリーンなソリューション, また同じの 5 ピンのコネクタでは利用可能なもの質量 (GND), 電源装置 (+5V) 補助入力 (9), 信号の接続に使用できます。 “インデックス” エンコーダー.
通常、エンコーダー、標準化された色と線があります。, 入力を使用する場合 7, 8 と 9, 次の表のようにそれらを接続する必要があります。:
GND ---- ブラック 7 ------ グリーン (で) 8 ------ ホワイト (B) 9 ------ 黄色 (インデックス) +5V ---- 赤
エンコーダーの信号を読む
すべての入力マスター カウントします。 (Encoder_a, Encoder_a_pu, カウンター, Counter_pu, Fast_counter と Fast_counter_pu) 0 間の出力値を生成し、 65535 (16 合計ビット). 値を超えたとき 65535 それはから始まる 0 を下回るとゼロから再度開始 65535. このメカニズムにより、多くのアプリケーションが非同期的に値を読み取る. アプリケーションを行うに引き受けることができるし、値の変更を登録する必要はありません。. 定期的に値を読み取るだけ, 時に、少なくとも毎秒, 決してステップを欠場するには.
Theremino カウンター リーダー アプリケーションはエンコーダーとカウンターを正しく読み取る方法を示しています.

単純なプロジェクトで使用できる Theremino CounterReader, スロットからエンコーダーを読むして別に値を書き込む, 主要なアプリケーションを使用する必要がありますが、 “CounterReader”. この方法で ReadValue 関数へのアクセスがあります。, 定期的に呼び出され、いつでも値をリセットする機能をリセットするには (ボタンが行うこと “ゼロのセット” カウンター リーダー).
バージョンから 1.2 以降、最大数のエンコーダーを使用できます。 65535, 4095 または 255 パルス. に設定する機能 4095 パルスにより、Feetechサーボの磁気エンコーダーを読み取って、事実上無制限のマルチターンスペースを取得できます。. Theremino_ModbusアプリケーションおよびFeetechサーボ専用のページも参照してください。 (の12月に公開される 2020).
ダウンロードdiTheremino CounterReader V1.2
Theremino_CounterReader V1.2_WithSources
すべての Windows システムの 32 と 64 ビット. ラズベリー pi, Linux, アンドロイドと OSX, 読んで、 インストールに関する注意事項.
ポテンショメータ
ポテンショメータのように動作すべてのトランスデューサー, すぐにシステム Theremino と読み取りのピンに接続可能. ため、 “Pintype”, Adc8 または Adc16 を選択します。 (Adc16 = 精度の向上).




ここでサンプルが表示されます。 (偉大な価格と) 各種センサーや古典的なノブの, ポテンショメータのように動作します。:
www.sparkfun.com_Membrane_Potentiometers
www.sparkfun.com_Flex_Sensors
![]()
リニア探触子を直接接続することができます。. (1 k から 100 k に電位差計をチェックします。, 購入する前に間違いなく送信データシートの場合)
– – – – – – –
Theremino システムに多くの完璧なアナログ ジョイスティックがあります。.

モデルは簡単に接続し、プッシュ ボタンもありますこの写真の. それは簡単に ebay で見つけることができます未満 5 ユーロ (検索: アナログ ジョイスティック コント ローラー).


はるかに小さいアナログ ジョイスティックもあります。 (プレイ ステーション用) または非常に大規模です (4 つの側面のポテンショメータと). 機械的にそれらをマウントし、ポテンショメータにケーブルを接続することは困難があることに注意してください。. 常に彼らがアナログであることを確認します。.
– – – – – – – –
電圧ポテンショメータと探触子で搭載する必要があります。 3.3 ボルト. これ以上 3、入力端子に 3 ボルト電圧を送信しないように、最大にゼロから右の範囲を取得するには, Adc16 として構成されているピンと読書.
取得する、 3.3 ボルトは、間に抵抗をカウント可能性があります + 5 v とポテンショメータ, 取得するポテンショメータの抵抗値を基に計算 3.3 ボルト. このメソッドは、ただし、2 つの欠陥があります。: 最初は、 5 USB ポートから派生したボルトは非常に騒々しい、半分ボルト 1 台のコンピューターから別の変更ができます。. 2 番目の問題は、ポテンショメータの実際の抵抗値はない実際の電圧は違った理論から多くの場合 3.3 正確なボルト、あなたはせいぜい到着で成功しないまたはストロークの終わりの前にくる. これらの問題を避けるためになる良い電源電圧垂下ポテンショメータ 3.3 ボルト, 例えば、このドキュメントの最後に示されているを参照してください。.
ポテンショメータを電源に接続するポテンショメータの 2 つの端を接続してください。 3.3 ピン接続の信号を入力する中央サーバーと GND ICSP AUXpins ボルト ソケット, 次の図に示すように:

この画像との接続は、 “リボン” (ThereminCello で使用されます。) 原則はすべてのセンサーの有効です, ポテンショメータとして演技.
![]()
この画像は、線形変換器の接続, 原則はすべてのセンサーの有効です, ポテンショメータとして演技.
で 注意: 確認します。 ポテンショメータの中央 (2), 極に接続されています。 “SIG”, Theremino ピンのいずれか. 中央のポテンショメータを接続する場合 で “GND” または “3,3V”, ポテンショメータが暖かいし、台無し!!!
注意: 確認します。 ポテンショメータの中央 (2), 極に接続されています。 “SIG”, Theremino ピンのいずれか. 中央のポテンショメータを接続する場合 で “GND” または “3,3V”, ポテンショメータが暖かいし、台無し!!!

代わりにポテンショメータの両極端 (1) と (3), 力をもたらす (+3.3ボルト) と (GND), 損傷することがなく自分たちの間で切り替えることができます。. スワップ (1) と (3) サービスを提供することができます。, 逆に動きの方向を基準にして対策.
極と並行して多くのポテンショメータを接続できます。 3.3 GND. 各ポテンショ メーターは、その中央の繊維を持つ必要がありますが、 (2) 別とポールに添付 “SIG” 区切られました。.
ポテンショ メーターの内部抵抗は重要ではありません。. 1 k から 100 k の値を使用してリニア型探触子のすべてのメーカー, すべてがうまく行く必要がありますので. (100 k から 1 k よりもさらに少ない動作可能性があります。, しかし、最初のケースでそれはあまりにも多くの電流を消費して後者少し直線がワイヤーによってピックアップ ノイズを増加)
ポテンショメータは、可変抵抗器としても使用される可能性, あなたはのみ 2 つの端子を使用している場合 (極端の 1 つの解放). この種類の接続は、単にシンプルとして機能します。, 2 線のみ、電源が入らない. しかし不利な点が, 正確値の全体の範囲を使用するには (通常から 0 で 1000), ポテンショメータを使用する必要があります。 50 正確な k ω. ポテンショメータを使用通常 に 47 K ω, 間値を生成します。 0 と 940, 修正して最高、最終的に前にいくつかの部屋に ’ ソフトウェア ツアー.
可変抵抗器
トランスデューサーの多くが可変抵抗器のように振る舞う, 写真抵抗器、温度可変抵抗器など (PTC または NTC)


地面と信号の可変抵抗器が接続されています。 (入力ピンの 2 つの極端) 電源供給を運ぶ中央線を許可します。. ピンのタイプに Res_8 または Res_16 を選択する方法.
Res8 または Res16 として構成されているピンが良いハイキング, 抵抗の値はについて非常に低い値と異なる必要があります。 50 k ω.
力敏感な抵抗器を接続します。




それはスケールにセンサーについてないが、, たとえば、, ThereminCello の圧力を感じるように, メモのポテンショメータの下でそれらを配置することによって (通常のリボン).

これらのセンサーは通常非常に高い耐性を持っています。 (について 1 メガ オーム) 追われ、彼らの抵抗が対数的に脱落, 圧力を増加させる, 数百 ω まで, 強度と押されたとき (について 1 Kg)
彼らの抵抗は私たちのピンに直接接続することができますに最適です。. それぞれの信号と GND に接続します。, 5 v を未使用に残す. そして最後に, Res16 として、ピンを構成します。.
その対数の応答の自然と正確な圧力への応答のおかげで.
ポテンショメータ、可変抵抗器を接続します。
良いハイキングが、ポテンショメータ、可変抵抗器を変えることができますがすることができる場合, ’ 固定抵抗器を追加します。, 次の図に示すように、:

可変抵抗器の遠足によって, 固定抵抗器の値を使用する必要があります。. アプリケーション ビューアー HAL として固定抵抗値を変更してみてください。, 必要な値を取得するまで、’ 遠足.
Vcc を使用する必要があります。 3.3 ボルトが安定しており、電圧 V は、Adc8 または Adc16 として構成されている PIN の入力を GND 信号に接続必要があります。.
練習では、この構成はポテンショメータを取得します。, その後、ポテンショ メーターの接続の詳細については前のセクションを参照してください。.
管に液体センサー
透明なプラスチック製のチューブに液体の存在を識別するために 1.6 mm 6.3 mm 直径 OPB350 センサーが快適です, 安価な Theremino システムに簡単に接続することができます、.
L を設定する値を読み取れません ’ として入学 “ADC” 比例検出を持っているので. 比例した価値は液体の存在を差別がまたストリーム中における固体粒子の存在とその濁度を測定することが可能になります.
特殊なケースで, 非常に濁ったまたは非常に透明な液体を, 測定値が非常に低いまたは非常に高い場合, 抵抗を 10 k から 100 k 以下の価値を高めることができるそれ 1 k まで.
周囲の光が強すぎるない場合に、低電流の led が動作でした。 18 しかし、標準およびこれらのセンサーの多くを使用する場合の電力を節約. 抵抗で 3300 オーム, たとえば、, について現在のだろう 1 最大 10 k の抵抗を高めることによって、信号の損失を補うことができるが、100 k またはも 220 k.



出力信号を超えることができるので 3.3 ピン Theremino ボルト入力システム, 33 k から、信号と直列に抵抗を追加することを検討してください。 (黄色線) 誰もがある時間と傾斜が変更プリント基板, マニホールドの R2 に移動します。, それを変える 10 33 k でコレクターからの信号を拾う, この方法で追加の 33 k がなくなる.
これらのセンサーは、様々 なモデルからの価格な 4 で 10 ユーロ ・ ファーネル,
サイトに行く http://it.farnell.com OPB350 を検索
常に・ ファーネルは利用可能な技術的なデータをデータ ・ シート.
http://www.farnell.com/datasheets/4603.pdf
–
PCB または veroboard OPB350 アダプター
プリント基板ブレッド ボードや板の切り欠きのアダプターを作成するのには、以下の画像のトラック以下の通り.
最初の 2 つの画像は、次の 2 つがモデル ラルゴ モデル APB350 海峡. ワシはここからプロジェクトのダウンロードを完了できます。: AdapterOPB350_EagleProjects




PH と ORP センサー (酸化/還元電位)
PH を測定するためをお勧めします約 Phidgets によって建てられたこれらの優れたアダプター 25 ユーロ.

ここでは、重要な事実: www.phidgets.com/products.php?product_id = 1130_0
ユーザー ガイドでは、すべての電気的特性を見つける, 校正やアドバイスを数式で電極を使用します。 www.phidgets.com/docs/1130_User_Guide
このセンサーからの出力を提供しますので 0 で 5 ボルトは、標準を使用して Theremino システムの入力 0 で 3.3 ボルトを追加する必要があります。, 接続ケーブルの, 地面に信号と 22 K シリーズの 10 k から抵抗分圧.
白--- 10K --@---------- ホワイト
|
22K
|
PH センサー赤 ----------------------------- 赤いマスター
|
Nero ------------------@---------- ブラック
回避策としては、モジュール Phidgets の抵抗を取り替えることができます。. このしてください電子メールを行う方法を知っていない場合、我々 に役立つ詳細な図面.
磁気センサー
磁場を測定するには、A1301 と A1302 センサー、アレグロ ・ マイクロシス テムズから製品を推奨します, 、 1301 敏感です。, 少ないコストします。, ほぼすべてのアプリケーションで良くなるだろうと. カタログ ・ ファーネル参照してください。: http://it.farnell.com やり直して A1301/A1302. 製造元からそれらを供給するように指示します。 4.5 で 6 ボルトの外の安定した電圧と分かった多くの試験の後では内蔵レギュレータおよび操作の比率-メトリック ベース 3.3 ボルトは、達成の優れた安定性とノイズ, ちょうど半分の値のフィールドの位置を休憩だけでなく、’ ADC. ここでは 2 つのモデルの機能
センサー感度彩度電源価格約
( MV/ガウス ) ( ガウス ) ( しかし ) 1/10 Pc
-----------------------------------------------------------------
A1301 1.65 +/- 1000 11 しかし 1.5/1.2 ユーロ A1302 0.87 +/- 1900 11 しかし 1.7/1.3 ユーロ

–
これらのセンサーは表面実装のバージョンで利用可能 ( SMD ) または通常の足 ( SIP ), ここでは、2 つのバージョンのコンテナー. リンクの順序は、バージョンによって異なることに注意してください。 ( SMD、SIP ) 両方のケースでは標準的なシステムの Theremino とは異なると.
——————————————
——————————————
——————————————
——————————————
—————————————-
———————————————————————————— 
最大感度と最小雑音はコント ローラーからこれらのセンサーを供給するよい 3.3 この画像に表示されている、この文書の最後に示すボルト. この写真もその SIP 型センサーへのリンクのシーケンスに合わせてワイヤーを逆にする方法を示しています. この例は、コネクタを使用せず、レギュレータは、小さく、頑丈な配線になっているケーブルに沿って溶着されています。最後に熱収縮チューブ、配線を行います, レギュレータを分離して、接続の強度の増大によって.
センサー “息” 圧力
弱い圧力を明らかにするには、違いはこのコントロール アンプに接続したエレクトレット マイクを使用できます。, l ’ 出力を ADC として構成されている任意の Theremino ピンに直接接続することができます. 2 つの端子にエレクトレット マイクを使用します。 (3 端子のもの) でも死体は、アース接続部分を接続してくださいと (-) このプリアンプは手順の検出器として機能する地中埋設管に接続するように設計します。. チューブがマイクにしっかりと接続されているし、感度が非常に高いパイプを覆う地球の層の小さな動きを明らかにするため. 以下の感度でこの検出器を使用する場合, たとえば、パフによって明らかにされました。, それは 1 uf のセラミックコンの C2 および C4 を下げ、100 k に R2 と R4 を上げる良い. 感度を上げるはまだあまりにも多くの場合は、R2 と R4 をさらに. これらの変更を元の値が非常に長い初期の整定時間も強化します。 (約 1 分).




AC 電流センサー
AC とセンサーはアプライアンスで電流を測定できます。, モーター、電気システム全体. ADC で測定することにより完全なフレームの繰り返しでチャンネルの正方形の平均は (RMS- “二乗平均平方根”) 最後に掛けると 220 (本管の電圧), PC 上でプログラムに, ワットの解像度を持つ力の正確な測定を取得します。. センサーをお勧めします (カレント トランス) モデル 3110 周りのコストを約 CR-磁気 10 ユーロ, 非常に正確な測定可能であり 16 Kwatt (75 アンペアで 220 ボルト). センサー 3110 それは優れた断熱効果を持っているので、CE および ISO に認定、安全対策をすることができます。 (認証のリクエストも承ります)

モデル 3110 仕様 ---------------------------------- プライマリの最大電流: 75Aac 周波数: 50/60 Hz 第 2 ターン: 3000 直流抵抗: 460 Ω 精度: 1% 連続的な分離: 1KV 絶縁 max: 5KV ワイヤー リード: AWG 18
両方半分波の計算ソフトウェアで行うにはダイオード ブリッジ、肯定的です, さらにこのメソッドがゼロ点の調整は不要します。. 現在のトランスはほぼ完璧な現在のソースなのでダイオードとその温度変化で秋を心配する必要はありません。. 目的の本格的負荷によって抵抗値はテーブルに応じて選択する必要があります。:
フルスケールワット |
フルスケールアンペア AC |
約のフルスケールの抵抗を負荷します。 3 ボルト (3.3 V の小さな余白を残してください。) |
測定分解能ワット |
| 16000 | 72.8 | 180 | 1 |
| 8000 | 36.4 | 360 | 0.5 |
| 4000 | 18.2 | 720 | 0.2 |
| 2000 | 9.1 | 1500 | 0.1 |
| 1000 | 4.5 | 3000 | 0.05 |
電圧・電流センサー – 簡単なバージョン
マスに関係の緊張 単純な抵抗分圧と従来の ADC で測定が可能. InOut の 2 つの極端なピンのみを使用しての標準的なコネクタ, 質量と信号, 中心ピン間に耐え +5 接続されていません。.
(+) ------- R1 ---@--------- ホワイト(ホワイト)
| Theremino 入力電圧 R2 --- 赤(赤) 標準
| 入出力ピン
(-) --------------@--------- ブラック(ブラック)
信号とグランド間 R2 と呼ばれる抵抗を接続, 代わりに測定する電圧の肯定的なターミナルと R1 と呼ばれる抵抗を接続する端子との間.
電圧 0 で +3.3 V, 解像度. 50 マイクロ ボルト (R1 = 10 k - R2 が存在しません。) 電圧 0 で +10 V, 解像度. 200 マイクロ ボルト (R1 = 100 k - R2 = 33 k) 電圧 0 で 100 V, 解像度. 2 ミリ ボルト (R1 = 1 メガ - R2 = 33 k) 電圧 0 で 1 KV, 解像度. 20 ミリ ボルト (R1 = 100 メガ - R2 = 330 k) 電圧 0 で 10 KV, 解像度. 200 ミリ ボルト (R1 = 1000 メガ - R2 = 330 k)
高電圧用: 超える電圧を測定するには 100 ボルト安全に抵抗 R1 できる必要があります 2 回測定する電圧に耐えるように. 1 個の抵抗からのシリーズでいくつかの抵抗器の文字列を使用するより良いではなく 10 メガか 82 メガ (・ ファーネル 1469973 / 2073866 / 9236503) 文字列の合計の長さのための余分なセキュリティを取得して買うよりより少し高電圧抵抗器を使うこの方法で, 葉 ’ 高電圧 l 物理的に防ぎアーク フラッシュ.
測定するには、高電圧表示もページの推奨事項: /ブログ/ガンマ-分析/ハードウェア-テスト
現在は流量 1uA です。 3.3 ボルト, 100流量の UA 10 と 100 ボルトとの明るさ 1000 と 10000 ボルト, この電流が過剰だった場合 100nA 電流で正常に動作して差動センサーの次の章を使用する良いだろうし、小さい電流で動作するように適応することができます。.
————————–
電流質量に関連 2 つの抵抗と従来の ADC で測定が可能. InOut の 2 つの極端なピンのみを使用しての標準的なコネクタ, 質量と信号, 中にピンの英語のテレビ チャンネルに耐え +5 接続されていません。.
(+) ------@--- 10K ------ ホワイト(ホワイト)
| Theremino 入力電圧 R1 --- 赤(赤) 標準
| 入出力ピン
(-) ------@-------------- ブラック(ブラック)
間、’ の入り口 (肯定的です) 電流を測定して、R1 と呼ばれる抵抗を接続するには, 第 1 の抵抗器 10 K オーム InOut のピンに電流を制限するために使用し、間違いのすべての種類に対して保護.
流れ 0 で 100 UA, 解像度 2 NA (R1 = 33 k) 流れ 0 で 1 しかし, 解像度 20 NA (R1 = 3300 オーム) 流れ 0 で 10 しかし, 解像度 200 NA (R1 = 330 オーム) 流れ 0 で 100 しかし, 解像度 2 UA (R1 = 33 オーム / 1 ワット) 流れ 0 で 1 で, 解像度 20 UA (R1 = 3.3 オーム / 10 ワット)
各コースの最大の電流を測定する際、これらの単純な回路では、電圧降下です。 3.3 いくつかの種類のメジャーを歪めることができるボルト, この秋は大きすぎる場合それは次の章の微分のセンサーを使用するより良い, それは通常の 150mV よりも小さい秋とも低い滝に適応することができます。.
電圧・電流センサー – 差分バージョン
この回路は、 “ジョリー”. 非常に小さな電圧差を測定することができます。 (または非常に大規模です) 強力なコモンモード電圧でも.
CN2 に接続します。 – 標準ケーブル ピンの入出力システムをうちに、Theremino 構成 ADC として (最高精度のために Adc16)


この方式で、回路許容コモンモード電圧まで +/- 33 ボルトと R9 の交換で以下の電圧範囲を取得します。:
電圧 -10 MV ~ +10 解像度を持つ MV 0.3 マイクロ ボルト (R9 = 1.5 メガ) 電圧 -15 MV ~ +15 解像度を持つ MV 0.5 マイクロ ボルト (R9 = 1Mega) 電圧 -30 MV ~ +30 解像度を持つ MV 1 マイクロ ボルト (R9 = 470 k) 電圧 -100 MV ~ +100 解像度を持つ MV 3 マイクロ ボルト (R9 = 150 k) 電圧 -150 MV ~ +150 解像度を持つ MV 5 マイクロ ボルト (R9 = 100 k) 電圧 -300 MV ~ +300 解像度を持つ MV 10 マイクロ ボルト (R9 = 47 k) 電圧 -1 V、 +1 解像度を持つ V 30 マイクロ ボルト (R9 15 k を =) 電圧 -1.5 V、 +1.5 解像度を持つ V 50 マイクロ ボルト (R9 = 10 k) 電圧 -3 V、 +3 解像度を持つ V 100 マイクロ ボルト (R9 = 0)
特性との間の最適な妥協点を選択します。
フルスケールで無理をする場合 確度と分解能が低下します。.
耐えられる一般的な方法で無理をする場合を悪化させるだろう 温度と調整のしやすさの変化に安定性 (トリマーを調整).
だからそれは良い コモンモード電圧を最小限に抑える (適切なアース接続や地面に活かし) 我慢の一般的な方法でそれをやり過ぎてはいけないと.
コモンモード電圧を最小限に抑える
地上接続なし, いくつかのケースで, ノート パソコンのプラグに地球を持っていない、特に、 220 ボルト, PC とも数百ボルトの設定間の緊張を開発すること. これらのケースで範囲のベアリングを使用する必要があります。 330 コモンモード ボルト, 著しく安定性の悪化.
代わりに, PC の質量が接地されている場合, クマのみ料理を使用できます。 3.3 共通モードのボルトと、取得します。 改善 10 温度安定性と調整のしやすさの時代.
お使いの PC は電源コンセントを通って大地に接続されている場合は大丈夫です。 (確認し、その l ’ 法によって電気システムが接地されています。)
地球にワイヤを接続するそれ以外の場合 ’ 電気システム, 頑丈なポイントでマスターの始まり (最高の場所は、c ’ USB コネクタの近くに大規模な地面は、). アースを接続することも ’ マスターまたはスレーブも dell のピン GND のいずれかの時点で電気システム ’ プリアンプ入力 GND. しかし彼らすべての敏感なポイント、それはそれらを使用することをお勧めではないです。, USB マスストレージを良い ’ 堅牢な dell.
すべてのケースでそれは常に良いから抵抗を追加するには 100 オーム (1/4 ワット), 地上に行く電線を直列. この抵抗により大衆の食材リング, 穏やかなフォーム成果物ともリンクで重大なエラーが発生した場合、ヒューズの役目.
注意: 通常システム THEREMINO、損傷なくこのミスは許容します。’ 特殊なケース – 我々 の土地を結合している ’ の電気システムと’ 大きな、悪い – PC や USB のグランド側を接続する必要がありますではなく, たとえば、, センサーまたはマスター シェイプの PIN の質量 – チェックする前にすべての接続の電源投入する必要がありますが完了 – ちょうど何か間違っているとすべての稚魚を間違った場所に SCINTILLONE を与える!!!
一般的な方法に許容を減らす +/- 3.3 ボルト
交換 R3, R4, R5 と R6 抵抗器 10 M ω 2 つのトリマー 470 K ω, 次の電圧範囲を取得します。:
電圧 -10 MV ~ +10 解像度を持つ MV 0.3 マイクロ ボルト (R9 = 150 k) 電圧 -15 MV ~ +15 解像度を持つ MV 0.5 マイクロ ボルト (R9 = 100 k) 電圧 -30 MV ~ +30 解像度を持つ MV 1 マイクロ ボルト (R9 = 47 k) 電圧 -100 MV ~ +100 解像度を持つ MV 3 マイクロ ボルト (R9 15 k を =) 電圧 -150 MV ~ +150 解像度を持つ MV 5 マイクロ ボルト (R9 = 10 k) 電圧 -300 MV ~ +300 解像度を持つ MV 10 マイクロ ボルト (R9 = 4.7 k) 電圧 -1 V、 +1 解像度を持つ V 30 マイクロ ボルト (R9 = 1.5 k) 電圧 -1.5 V、 +1.5 解像度を持つ V 50 マイクロ ボルト (R9 = 1 k) 電圧 -0.3 V、 +0.3 解像度を持つ V 10 マイクロ ボルト (R9 = 0 オーム)
一般的な方法に許容を増やす +/- 300 ボルト
交換 R1 と R2 抵抗器 100 メガ オーム (R3, R4, R5 と R6 = 1 メガとトリマー = 47 k, 図に示すように、), 次の電圧範囲を取得します。:
電圧 -1.5 V、 +1.5 解像度を持つ V 50 マイクロ ボルト (R9 = 100 k) 電圧 -15 V、 +15 解像度を持つ V 500 マイクロ ボルト (R9 = 10 k) 電圧 -100 V、 +100 解像度を持つ V 3 ミリ ボルト (R9 = 1 k) 電圧 -300 V、 +300 解像度を持つ V 10 ミリ ボルト (R9 = 0)
一般的な方法に許容を増やす +/- 3000 ボルト
交換 R1 と R2 抵抗器 1 ギグ オーム (R3, R4, R5 と R6 = 1 メガとトリマー = 47 k, 図に示すように、), 次の電圧範囲を取得します。:
電圧 -1.5 V、 +1.5 解像度を持つ V 50 マイクロ ボルト (R9 = 1Mega) 電圧 -15 V、 +15 解像度を持つ V 500 マイクロ ボルト (R9 = 100 k) 電圧 -150 V、 +150 解像度を持つ V 5 ミリ ボルト (R9 = 10 k) 電圧 -1000 V、 +1000 解像度を持つ V 30 ミリ ボルト (R9 = 1 k) 電圧 -3000 V、 +3000 解像度を持つ V 100 ミリ ボルト (R9 = 0)
一般的な方法に許容を増やす +/- 30000 ボルト
交換 R1 と R2 抵抗器 1 ギグ オーム, R3, R4, R5 と R6 と 100 K オーム と、 トリマー と 4.7k, 次の電圧範囲を取得します。:
電圧 -15 V、 +15 解像度を持つ V 500 マイクロ ボルト (R9 = 1Mega) 電圧 -150 V、 +150 解像度を持つ V 5 ミリ ボルト (R9 = 100 k) 電圧 -1500 V、 +1500 解像度を持つ V 50 ミリ ボルト (R9 = 10 k) 電圧 -10000 V、 +10000 解像度を持つ V 300 ミリ ボルト (R9 = 1 k) 電圧 -30000 V、 +30000 解像度を持つ V 1 ボルト (R9 = 0)
高電圧用
入力電圧を超えている場合 150 ボルト, それが保障されなければなりません。 R1 と R2 彼らはそれを処理することができます。. 置換 R1 と R2 高電圧用外部抵抗器を, シリーズの多くの抵抗器から成る, 差出人 10 メガか 82 メガ (・ ファーネル 1469973 / 2073866 / 9236503). これらの抵抗は、安い (高価で、見つけるは難しい) 余分なセキュリティを得る高電圧抵抗器およびシリーズのより多くの抵抗を使用して. 高電圧抵抗器、物理的に移動 l の文字列の合計の長さ ’ アーク フラッシュを防ぐ.
値を増やす R1 と R2 まで 1 ギグ オーム (外部抵抗をシリーズに) 最大の電圧を測定することができます。 +/- 30000 ボルト, 同じように大きなコモンモード電圧で.
価値を高める R1 と R2 さらに入力に電流を減少させるも使えます 10 メガ オーム基準が 100 NA 用すべて測定.
なぜ don't を提供して保護用ダイオード? 既に運用上に存在しているので ’ 未解決追加と信頼性の向上と. 高電圧によって延期されていません。. 入力抵抗が高い値の場合, 現在は低く、それはすべてがスムーズに収まる. もちろん、あなたがやっているし、間違いを知るべきであります。.
電流を測定します。
関連していない適当な抵抗値で質量を測定できます, フルスケール目的に応じて. 基本的なバージョンから始まってください。 (150mV から + の図に示すように、すべての値を持つ 150mV) 抵抗を追加して (R0 と呼ぶ), 間 + と -, 次のコースが表示されます。:
流れ -1.5 が、 +1.5 しかし、1200年倍. によって 50 ナノ アンプ (R0 = 100 オーム) 流れ -15 が、 +15 しかし、1200年倍. によって 500 ナノ アンプ (R0 = 10 オーム) 流れ -150 が、 +150 しかし、1200年倍. によって 5 マイクロ アンプ (R0 = 1 オーム) 電流 1.5 A +1.5 最大 1200 x. によって 50 マイクロ アンプ (R0 = 0.1 オーム)
———————–
計算式
表に示す値は概算値であり、大体スケールを決定するために使用されます。. 多くの高精度シミュレーション LTSpice を得ることができるまたは次の数式:
数式
電圧利得 = (R3 / R1) * (1 + 2 * R9 / R8)
最大コモンモード電圧 = 3.3 * R1 / R3
最大電圧差 = 3.3 / 電圧利得
制約
VoutMax = 3.3 ボルト
VoutMIn = 0
R1 = R2
R3 = R4 = R5 = R6 (R3 R4 より大きいことが選択されていると)
トリマーについて = 5% R3 の
———————–
この ZIP ファイルを含むプロジェクト全体のイーグル プリント基板, 画像, スキーマ, アセンブリ計画とシミュレーション LTSpice: Sensor_DiffMeter
シミュレーション LTSpice ではライブラリをダウンロードこのページから:
https://www.theremino.com/downloads/uncategorized#ltspice
電流センサー
注意
電源を入れて充電した状態で配線を接続すると, 電源のコンデンサ,
これは通常、非常に大きくて悪いです, 給電しているモジュールで突然放電します.
その瞬間、数十アンペアまたは数百アンペアがこのセンサーを通過します,
それらは数ミリ秒の時間を通過しますが、このメーターのチップを燃やすのに十分です.
したがって、このセンサーを使用する場合は、最初にすべてのワイヤーを接続してから、電源をオンにします.
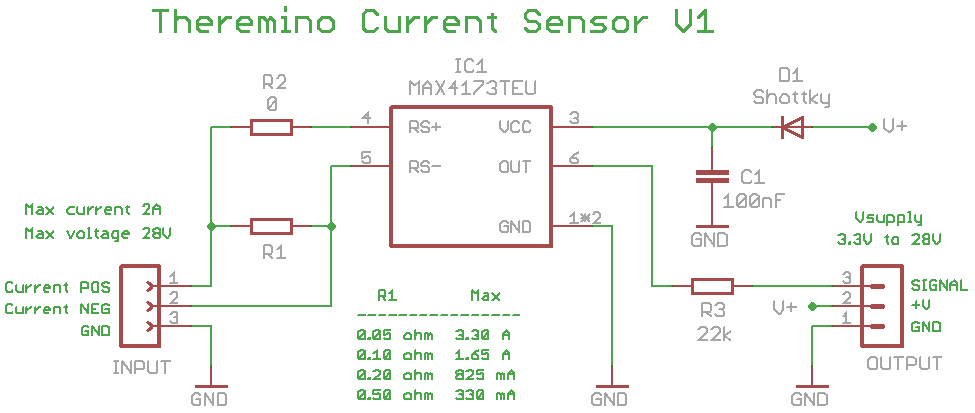
この単純な回路変換マスターの ADC 入力モジュール, ハイサイド電流センサーの. このセンサーの可能な用途の 1 つは供給を測定はサーボモータの現在 (古典 “サーボ” 模型飛行機の) 出力端子は、機械的なトルクを制限するこの情報を使用して、.
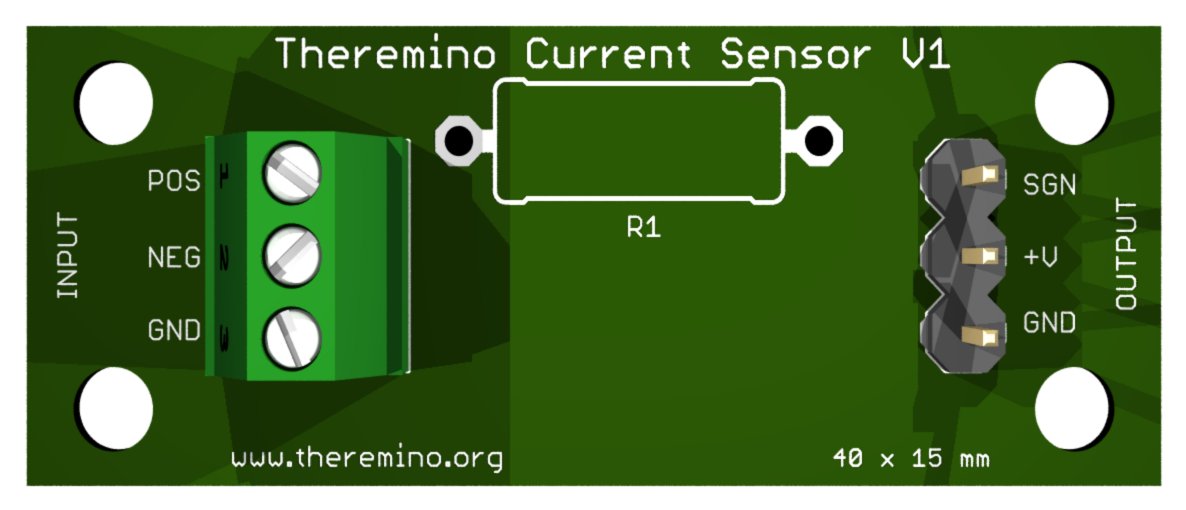
他の人からこの回路を区別する機能は、正電源電流を測定する能力, 最大電圧で動作するデバイス 28 ボルト (25 エッジで動作していないため).
測定する電流は極に 1 と 2 入力コネクタ. 基本的には正電源線をカットして、ポールにそれらをリンク 1, 貿易から継続的な 2 動力を与えられたデバイスに行けば.
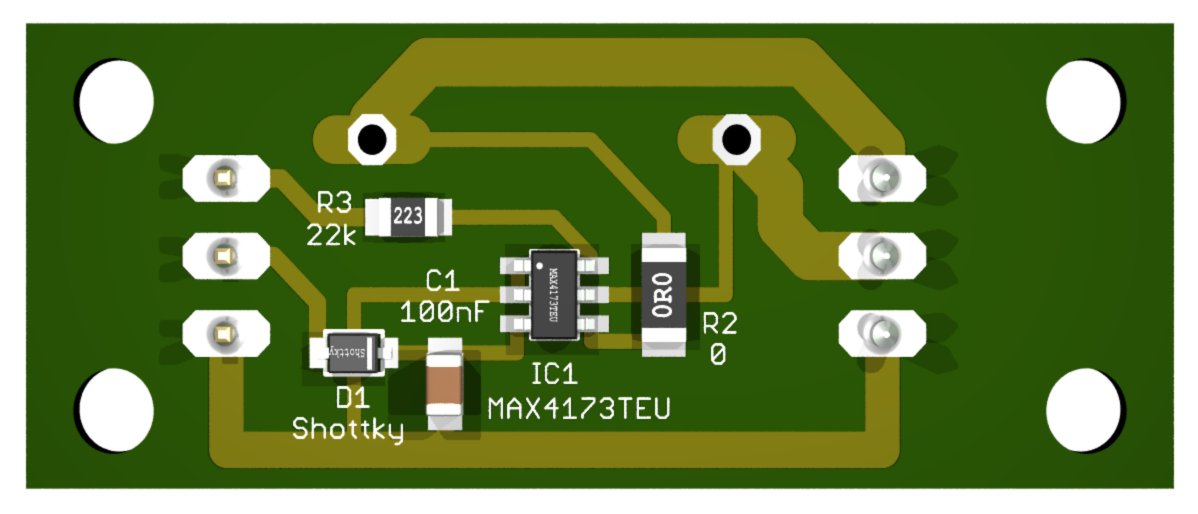
抵抗 R1 を交換, それはからある必要があります。 1 または 2 ワットと約 10 mm, 様々 な測定範囲を得ることができます。, 図に示すように.
またその他の中間の流量を得ることができる抵抗器によってあなたが使用可能な. ある場合, たとえば、, 抵抗器の 0.5 オーム, 1 つを使用してあなたを得る 330 しかし、フルスケール. 第 2 平行のシールが、 (次に), 取得したいです。 660 しかし. 3 分の 1 をシールと 990 しかし.
最大定格電流を超える場合は、R2を100μA未満の抵抗に交換することをお勧めします。 100 オーム. これにより、最大流量をはるかに超えている場合でも入力が保護されます. もちろん、最大流量を超えると、有用な測定値は得られません, しかし、少なくともICは壊れません. また、次の点にも注意してください, 最大流量を長時間超えた場合, 抵抗R1が熱くなり、最終的には焼損する可能性があります.
次のプロジェクトをダウンロードしたワシこのセンサーを構築できます。 このファイル. Web サイト上で購入することができますか 伊野店.
抵抗と静電容量センサー
抵抗 0 普通の 50Kohm 小型で Res_16Capacità に入力を測定できます。, pF の 1000 分の 1 の順序で CapSensor の奴隷を測定できます。. 抵抗値と時間の経過していないコンポーネントのそれはより多くの利点を持ち、校正を必要としない通常のテスターを使用するメジャーを変更するスキルを測定する Theremino システムを作ったことを考慮します。.
湿度センサー
湿度センサー (温度) 彼らは、気象センサーのページ上のすべて
https://www.theremino.com/hardware/inputs/meteorology-sensors#hih4000
熱電対温度センサー
温度センサー (湿度) 彼らは、気象センサーのページ上のすべて:
https://www.theremino.com/hardware/inputs/meteorology-sensors#thermocouples
温度センサー
温度センサー (湿度) 彼らは、気象センサーのページ上のすべて:
https://www.theremino.com/hardware/inputs/meteorology-sensors#ambient
ロードセル


ピン型 ADC に、ロードセルを接続できます。, フォームを使用 差分計, しかし、非常に低い出力信号を与える, 良好な安定性を得ることが困難です。.
負荷をテストするには、細胞は HAL のアプリケーションを提供しています、アプリケーションにも便利 “バランス” このページからダウンロードすること: https://www.theremino.com/downloads/automation#balance
高精度スケールを変更してADC24モジュールに接続
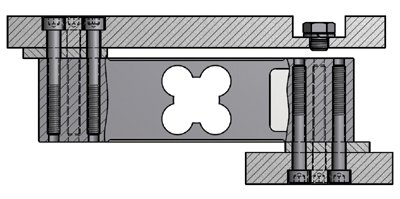
いくつかの高精度スケール, 少数のユーロのための eBay で購入することが, 非常に正確なロードセルを含む. 重量力位置を積むところはどこでもこれらの細胞の台形機構により垂直. この方法では、測定は測定される物体の形状と位置の独立しました。.
新しい ADC モジュールがある場合 24 接続がシンプルで非常に良いパフォーマンスです。. フォーム Theremino Adc24 それまで読むことができます。 8 体重計, 1 秒あたり 100 回. メカニックが適切な場合は、ミリグラムまでとそれ以降の解像度を実現できます。. ロード セルが直接接続されています。, アダプターやないのポテンショメータを調整することがなく.
このドキュメントは、負荷セル システム Theremino を接続する方法を説明します.
この新しいバージョンでは説明した、精密スケールを変更する方法と何が最善を購入するには (ページから 9 以降)
https://www.theremino.com/files/Connecting_LoadCells_V2_ENG.pdf
https://www.theremino.com/files/Connecting_LoadCells_V2_ITA.pdf
アダプター, 電圧レギュレータ, フロー絞り
いくつかのセンサーやアクチュエータ制限電流安定化電源供給を必要とするか. いくつかのケースで我々 はまたからの信号を適応しなければなりません。 5 ボルト 3.3 ボルト.






すべてのアダプターは、ここで収集されました。:
www.theremino.com/hardware/adapters
精密センサー
ピン Theremino システムは、高解像度測定を提供します。, 1部まで 50000, 通常のテスターの解像度よりもはるかに高い, 読み取りが非常に安定した値以外, 少し騒々しい、サンプリング レートは、メーターよりもはるかに高い. その一方で、しかし、測定の精度はより乏しい. この文書に示すセンサー, 標準的な入出力ピンに接続されています。, 達成可能な精度 1% の順番です。, 精度までプッシュすることができます、 0.1% またはそう, 勤勉な個人キャリブレーション. これらの制限を克服するために設計する必要があります。 “スレーブ” 特定のモジュール, 現在の技術によって達成可能である任意の精度ですべての物理量を測定することができます。.
マスター上でのみ新しい pin を現在開発していると、 ADC モジュール 24.
その他 “奴隷” ユーザが開発したことがあります。. ただし、これは 5 分の仕事ではないです。. ファームウェアと Theremino システムの専門家, ピンの新しいタイプを作るために数週間、新しいスレーブにするいくつかの数ヶ月かかることがあります。 (ファームウェアを書くことに加えて、HAL を更新する必要があります ’ CSharp の VbNet の両方, それ以外の場合、新しい種類は認識されません。).