
Theremino NDVI
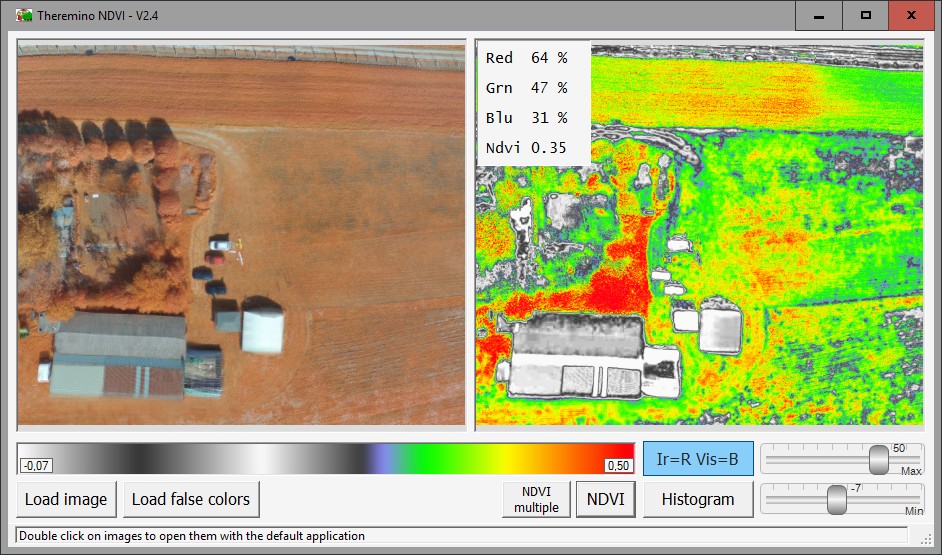 NDVI の画像 (正規化差植生指数), 偽色スケールで植物の健康状態を表示します。. 健康な植物はより多くの赤外線乾燥植生や病気を反映しています。. なぜ変更されたカメラを使用してアプリケーション Theremino NDVI 画像を処理します。.
NDVI の画像 (正規化差植生指数), 偽色スケールで植物の健康状態を表示します。. 健康な植物はより多くの赤外線乾燥植生や病気を反映しています。. なぜ変更されたカメラを使用してアプリケーション Theremino NDVI 画像を処理します。.
この変換を実行する商用アプリケーションもあります。, しかし、彼らは、高価で複雑です. また使用することができます。 Infragram, Web で使用可能な柔軟性に欠けるだけです。.
カメラを変更します。
いくつかのカメラが他よりも適しています。, 通常のビジネスのすべてのデジタル カメラを収めることができます。. L ’ より難しい操作は赤外線フィルターを削除するには, 内部にある ’ の目標. 前に青いフィルターを追加し、’ の目標, または内部, 変換が上であると.
私は通常も赤外線ができる青色のフィルターを使用して、赤外線赤と青に含まれている画像を取得. 赤外線、赤のチャンネルに格納されます。, 青のチャネルと緑の青は使用されません。.
我々 のテストによると良いフィルターは “ロスコ夜青 # 74”, 安価なフィルターのゼリー、よい答えがあります。. 他の多くのフィルターがありますが、, いくつかのも非常に高価です. 何人かの著者は好む赤いフィルター.
これらの変更の詳細については、インターネットで多くの記事で説明. 検索 “NDVI の部屋”, “Infrablue フィルター”, “ロスコ赤外線”, “NDVI フィルター” など…
次のリンクは、いくつかの例, カメラの多くのサイトの中で
http://diydrones.com/profiles/blogs/photosynthesis-assessments
http://www.instructables.com/id/Turn-to-Canon-camera-into-a-Plant-Health-Analyzer-u
https://publiclab.org/notes/cfastie/04-26-2014/mobius-ndvi
これらはフィルターについて話すサイトです
https://www.rosco.com/filters/supergel.cfm
http://purposefulscience.blogspot.it/2014/09/comparing-rosco-infrablue-filters-2007.html
https://publiclab.org/notes/nedhorning/10-30-2013/red-vs-blue-filters-for-ndvi
https://publiclab.org/notes/nedhorning/11-01-2013/why-a-red-filter-should-work-well-for-ndvi
そして、このサイトでは、ドローンに関する多くの有用な情報を見つけることができます:
https://hobbyhelp.com/drones
Theremino NDVI の特徴
- 最小および最大コントロール対応操作不適切なホワイト バランスでも画像または非最適な照明条件で撮影.
- 関数 “ヒストグラム” 最適な設定を見つけることができます。.
- ダブルクリックして、’ ヒストグラムは、Min と Max に自動的に調整します。.
- 画像をダブルクリックして、既定のイメージ プログラムに送信します。.
- ボタンで “複数の NDVI” フォルダーとそのサブフォルダー内のすべてのイメージを処理することができます。.
- 色ボタン両方クラシック ブルー フィルターを使用できます。, 赤フィルター.
- 1 ダースの偽のカラー スケールを選択します。, 植生の最高の機能を高めることができます。.
- 任意の編集プログラムで新しい偽色のイメージを作成できます。 (塗料など). 偽色のイメージはフォルダーである必要があります。 “FalseColors_Scales” 通常彼らはから PNG 256 x 32 ピクセル (Theremino NDVI は、他の形式でそれらを受け入れる).
バージョンについてのメモ
バージョン 1.5: 最初の公開バージョン.
バージョン 1.6: 4 の倍数以外のイメージの幅で NDVI を変換することでエラーを修正. 新しいマウスも使用する TrackBar を修正します。, ミクロのホイールで (ショットなし).
バージョン 2.4: 追加 l ’ ヒストグラムとその他の機能. 読み取り、 “機能” 上記.
バージョン 2.5: 画像を変換するようになりました 24 水平方向のサイズとビットの倍数ではありません。 4.
Theremino NDVI をダウンロードします。 – バージョン 2.5
Theremino_NDVI_V 2.5
2.4 Theremino_NDVI_V _WithSources (プログラマのための完全な設計)
すべてのウィンドウのバージョン 32 と 64 ビット. ラズベリー pi, Linux, アンドロイドと OSX, 読んで、 インストールに関する注意事項.
Theremino ドローン パイロット ログ (Uav パイロット ログ)
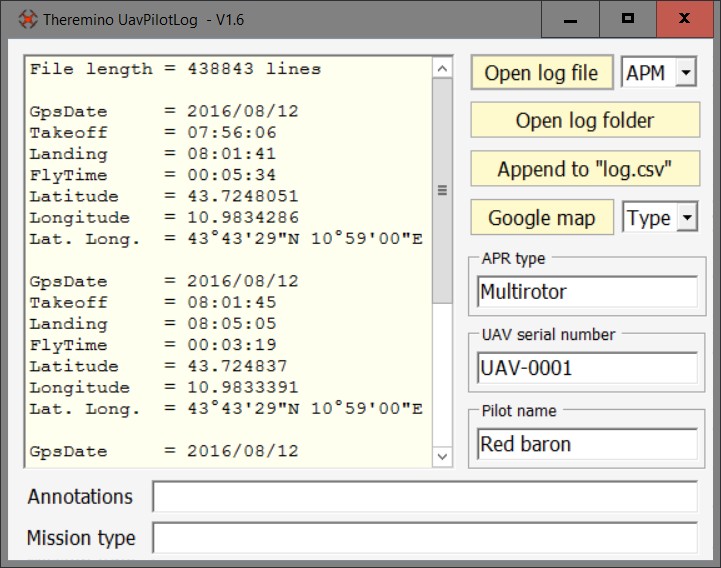
UAV ログ (無人航空機) 長いまたは複雑なファイルは、します。. これらのファイルは、によって生成されます。 オープン ソース ソフトウェア DroneCode またはその他の商業ソフトウェア. いくつかのログの行, その他の情報の何千もの間で散在しています。, 彼のプロのドライバーをコピーする必要がありますデータが含まれて “航海日誌” すべてのフライトの後. 手動でこれを行うことは困難と一部のデータがコード化されたのでゆっくりと人間が読むことは不可能.
Theremino UavPilotLog 更新アプリケーションと Loogbook のパイロットのスタッフ迅速かつ簡単な操作になります.
抽出は、航海日誌スタッフに追加されるデータします。:
- 年、月、日
- UAV の種類
- シリアル番号
- 離陸の座標
- 出発時刻
- リンク先の座標
- 着陸の時間
- パイロットの名前
- 注釈
- ミッションの種類
- フライトの分と秒
ログが複数含まれる場合便はログブックに複数の行を追加.
マップ
マウスをクリック Google マップまたは Google Earth 上に場所を表示することができます。. ログに多くの便が含まれている場合は、各フライトの緯度と経度の線をマウスでクリックして座標を選択できます。.


バージョンとダウンロード
バージョンについてのメモ
バージョン 1.6: 最初の公開バージョン.
Theremino UavPilotLog をダウンロードします。 – バージョン 1.6
Theremino_UavPilotLog_V 1.6
Theremino_UavPilotLog_V 1.6 _WithSources (プログラマのための完全な設計)
すべてのウィンドウのバージョン 32 と 64 ビット. ラズベリー pi, Linux, アンドロイドと OSX, 読んで、 インストールに関する注意事項.