
Theremino StepperDriver

Questo modulo permette di montare fino a cinque drivers per motori stepper e ha due uscite con mosfet per pilotare motori, relè o fili caldi per il polistirolo e regolarli in PWM.
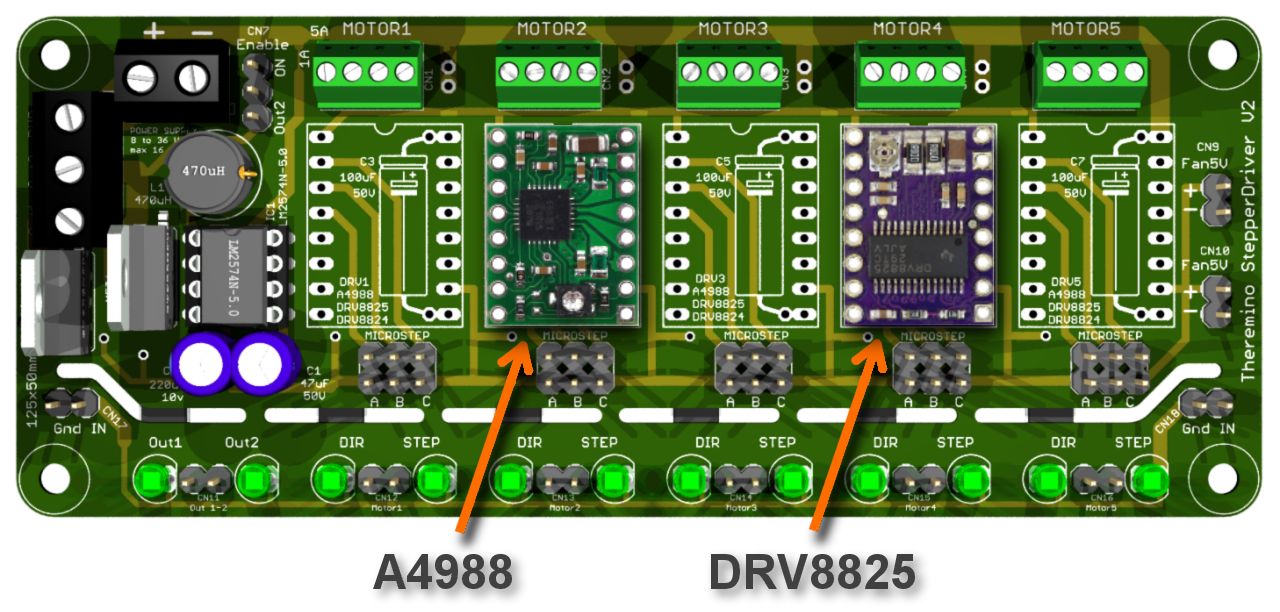
Si possono montare vari tipi di driver (DRV8825, DRV8824, A4988 e altri simili). I driver sono facilmente sostituibili quindi in caso di guasti non si deve sostituire tutta la piastra ma solo un driver. Tra l’altro i driver costano solo qualche Euro quindi è possibile tenerne sempre uno di scorta e non rischiare mai di rimanere con la macchina ferma.
Per informazioni sui driver e sulle loro regolazioni
leggere questa pagina.
La particolarità che distingue questa scheda dalle solite schede (tipo Ramps o CncShield) è di essere totalmente foto-accoppiata. Si può quindi mantenere un completo isolamento galvanico tra la logica di controllo e l’elettronica di potenza della macchina. Questo permette di evitare i loop di massa e tutti i rischi ad essi associati.
Attenzione al ponticello marcato “Out2″/”On”. Posizionare il ponticello su “On” per abilitare i driver altrimenti non funzioneranno. Se lo si posiziona su “Out2” allora il secondo Mosfet non sarà più utilizzabile perché il suo foto-accoppiatore viene destinato alla abilitazione dei cinque driver.
Caratteristiche degli ingressi
- Gli ingressi dei foto-accoppiatori vanno pilotati con almeno 3 volt.
- Si devono mantenere separate le masse degli ingressi dalle masse della parte di potenza.
Caratteristiche di alimentazione
- La alimentazione principale può essere da 8 a 36 volt. Consigliabile non superare i 32 volt per avere un po’ di margine.
- La corrente necessaria per alimentare gli Stepper è più bassa di quella che si regola sui Trimmer. Il totale può arrivare ad un massimo di qualche ampere con cinque driver, tutti regolati alla massima corrente e con tensione di alimentazione di soli 8 volt. Man mano che la tensione di alimentazione sale la corrente diminuisce. Normalmente basta un alimentatore da due ampere.
- Se l’alimentatore principale deve alimentare anche i carichi collegati ai Mosfet allora lo si deve dimensionare tenendo conto anche di queste correnti, fino a circa 16 ampere. Meglio non andare oltre.
- Un connettore (a sinistra) riporta il positivo della tensione di alimentazione e le connessioni ai due Mosfet. Se non si vuole utilizzare la stessa tensione di alimentazione si può lasciare scollegato il polo di alimentazione di questo connettore e utilizzare un alimentatore esterno.
- La tensione massima sopportabile dai Mosfet è 60 volt ma è meglio non superare i 50.
- La corrente massima sopportabile dai Mosfet è una ventina di ampere (senza dissipatore) e fino a 30 o 40 con un buon dissipatore. Attenzione che la parte metallica non è isolata. Quindi probabilmente si può riuscire a dissipare solo il mosfet di sinistra, coricandolo. Queste sono correnti massime, se si superano i dieci ampere a Mosfet è bene valutare caso per caso e fare molte prove.
- Si possono pilotare i Mosfet in PWM fino a frequenze piuttosto alte, anche centinaia di KHz. Si consiglia però di utilizzarli non oltre i 20 KHz per non aumentare la loro dissipazione.
- I tempi di commutazione dei Mosfet sono inferiori a 100 nS.
- Il ritardo prodotto dai foto-accoppiatori è di 300 nS (versione 1) oppure di 800 nS (versione due).
Caratteristiche del 5 volt per le ventole
- Il regolatore Switching a bordo crea un 5 Volt per la logica e per le ventole.
- Due connettori con il 5 Volt per due piccole ventole da piazzare su un supporto di plastica fatto a “U” che fa scorrere l’aria lungo tutti i driver. Con le ventole e i dissipatori si possono utilizzare i driver fino alla massima corrente specificata nelle loro caratteristiche. Per tre driver si monta una sola ventola, per cinque se ne montano due.
- La corrente massima prelevabile dal 5 volt è di circa 400 mA in totale.
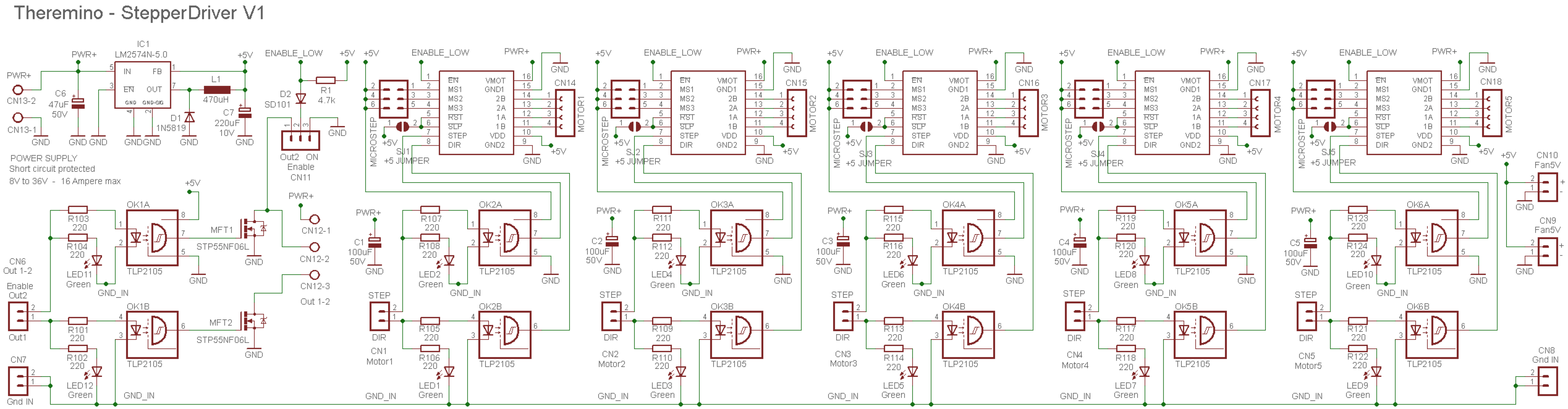
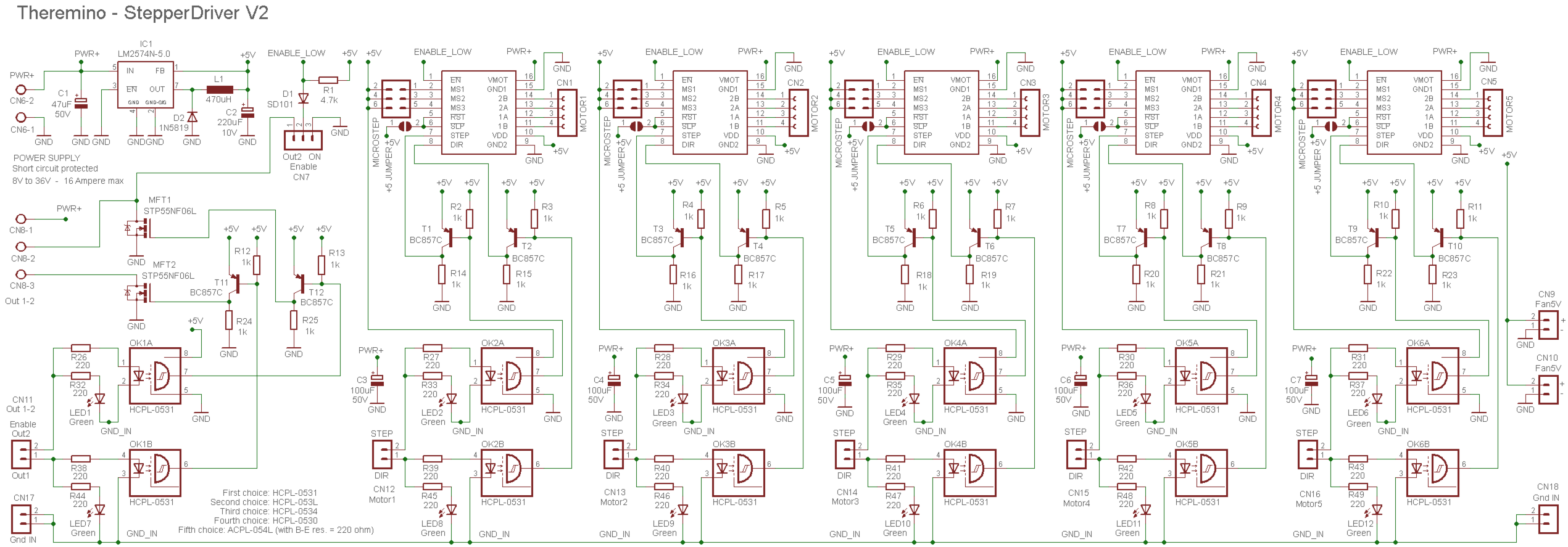
Versioni 1 e 2
Esistono due versioni identiche come caratteristiche e anche come dimensioni. L’unica differenza è il tipo di foto-accoppiatori che vengono montati e i componenti associati.
La versione 1 usa i foto-accoppiatori TLP2105. Questi foto-accoppiatori sono difficili da reperire e costano abbastanza, ma sono “non invertenti” e quindi il circuito è più semplice.
La versione 2 usa foto-accoppiatori HCPL-0531. Questi foto-accoppiatori sono facili da reperire e costano meno, ma invertono il segnale e quindi richiedono un transistor aggiuntivo.
Fori di fissaggio
Le dimensioni esterne sono 125 x 50 mm (scritte anche sulla sinistra del circuito stampato) e le distanza tra i fori è di 117 x 42.5 mm, come si vede nella seguente immagine.

Downloads
Progetti completi in formato Eagle, immagini 3D, schemi e data-sheets dei componenti:
https://www.theremino.com/wp-content/uploads/files/Adapter_StepperDriver_V1.zip
https://www.theremino.com/wp-content/uploads/files/Adapter_StepperDriver_V2.zip
Adattatore di voltaggio
Questo adattatore può essere utile quando si devono inviare agli ingressi del modulo Master segnali con tensioni maggiori di 3.3 volt o inferiori allo zero volt (quindi negative rispetto a GND).
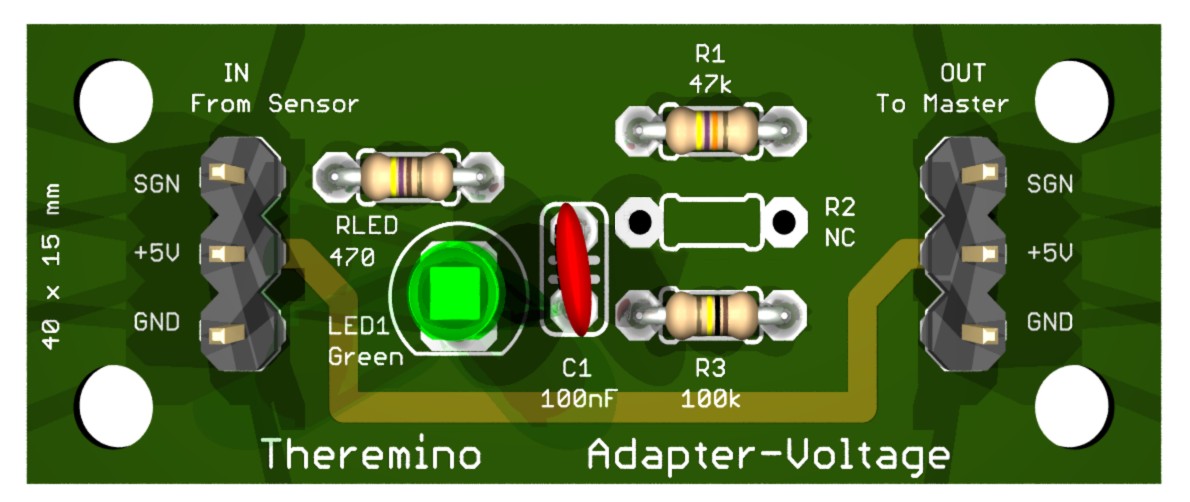
Modificando il valore di due resistori si possono adattare gli ingressi per segnali da cinque volt, oppure da 12, oppure fino a 24, o anche maggiori.
Con tre resistori si possono utilizzare anche segnali che vanno da tensioni negative fino a tensioni positive, ad esempio da -5 volt a +5 volt, o da -12 volt a + 12 volt.
Inoltre questo circuito permette al Master di sopportare disturbi di grande ampiezza, che altrimenti potrebbero disturbare i dati USB e provocare un blocco della comunicazione con il PC.
Schema elettrico
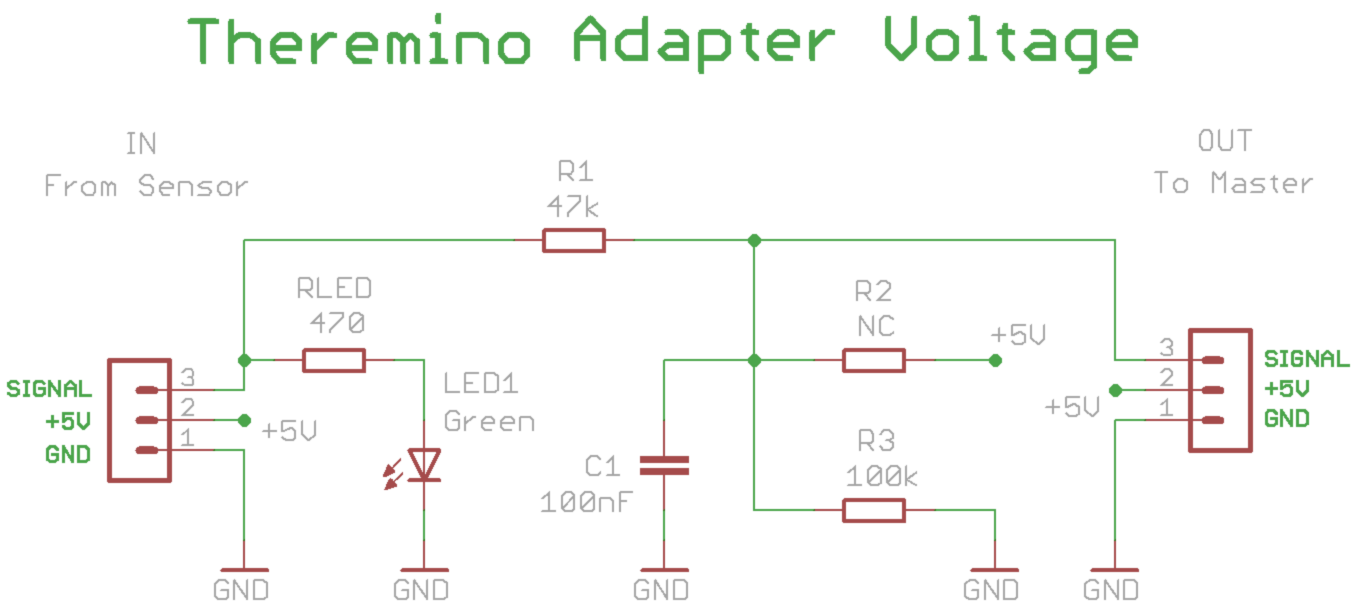
RLED e LED1
Servono per visualizzare lo stato del segnale di ingresso. Per visualizzare tensioni positive e negative si possono utilizzare i led speciali, che si accendono in rosso o in verde a seconda della polarità.
Il valore del resistore RLED va scelto a seconda del campo di tensione del segnale di ingresso. Nella prossima sezione c’è una tabella per questo resistore. In ogni caso è meglio utilizzare LED ad alta efficienza e alti valori di resistenza, in modo da caricare il segnale con non più di qualche milliampere.
Valutate caso per caso se il segnale di ingresso può sopportare la corrente del LED senza venirne disturbato. Se il LED non è necessario allora si può toglierlo e eliminare ogni problema.
C1
Questo condensatore aumenta la immunità ai disturbi impulsivi rapidi. Con valori resistivi di qualche decina di chilo-ohm e con un condensatore da 100 nano-farad si ottengono tempi di salita di alcuni millisecondi che eliminano efficacemente i disturbi provenienti dall’impianto elettrico, che sono solitamente nell’ordine delle decine di micro-secondi.
Per aumentare la immunità ai disturbi, ma accettando ritardi fino a centesimi o decimi di secondo, si potrebbe aumentare il valore di C1 a 1 uF oppure a 10 uF. Esistono condensatori ceramici a goccia da 1 e da 10 uF che sono appena più grossi di quelli da 100 nF e che costano abbastanza poco su eBay o su Mouser. Non trovando di meglio si possono anche utilizzare condensatori elettrolitici (con il negativo verso GND) che però sono grossi e scomodi.
R1, R2 e R3
Modificando il valore di questi tre resistori si ottengono tutti i campi di misura possibili. Per tensioni positive si usano solo R1 e R3, quindi si lascerà vuoto il posto di R2.
Oltre a ridurre la tensione questi resistori limitano la corrente in caso di disturbi con forti extra-tensioni e quindi proteggono la comunicazione USB e evitano che possa bloccarsi.
Le tabelle seguenti aiutano a scegliere i valori più appropriati per questi resistori.
Tabelle per i valori dei componenti
Valori per il resistore RLED
|
Tensione di ingresso massima (positiva o negativa) |
Valore di R1 per 5 mA | Valore di R1 per 1 mA | Valori di R1 per 200uA |
| 5 V | 560 ohm | 2700 ohm | 12 k |
| 6 V | 820 ohm | 3900 ohm | 18 k |
| 10 V | 1500 ohm | 8200 ohm | 39 k |
| 12 V | 2200 ohm | 10 k | 47 k |
| 15 V | 2700 ohm | 12 k | 68 k |
| 18 V | 3200 ohm | 15 k | 75 k |
| 24 V | 4700 ohm | 22 k | 120 k |
| 36 V | 6800 ohm | 33 k | 180 k |
| 48 V | 10 k | 47 k | 220 k |
Per evitare di caricare il segnale di ingresso e quindi modificarne la tensione, specialmente se si fanno misure con un ingresso ADC, è bene utilizzare LED molto efficienti e la minima corrente possibile.
I valori di questo resistore non sono critici, qualunque valore intermedio tra le tre colonne potrebbe andare bene. Per avere più luminosità andate verso i valori più bassi, ma se il LED fa abbastanza luce alzate pure il valore di resistenza anche al di la del valore massimo indicato nella tabella.
Valori per i resistori R1 e R3 per tensioni solo positive (senza R2)
| Vmin | Vmax | R1 | R2 | R3 |
| 0 | +3.3 | 10k | – | – |
| 0 | +4.5 | 12k (12k) | – | 33k |
| 0 | +5 | 18k (17k) | – | 33k |
| 0 | +6 | 27k (27k) | – | 33k |
| 0 | +9 | 56k (57k) | – | 33k |
| 0 | +12 | 91k (87k) | – | 33k |
| 0 | +15 | 120k (117k) | – | 33k |
| 0 | +18 | 150k (147k) | – | 33k |
| 0 | +24 | 220k (207k) | – | 33k |
| 0 | +36 | 330k (327k) | – | 33k |
| 0 | +48 | 470k (447k) | – | 33k |
Valori per i resistori R1, R2 e R3 per tensioni negative e positive
| Vmin | Vmax | R1 | R2 | R3 | K1 | K2 |
| -2.5 | +2.5 | 18K(16.5k) | 33k | 1meg(1089k) | 1.515 | 1.650 |
| -3.3 | +3.3 | 22k(21.8k) | 33k | 65k(64.1k) | 2.000 | 1.650 |
| -4.5 | +4.5 | 33k (29.7k) | 33k | 36k (35.9k) | 2.727 | 1.650 |
| -5 | +5 | 39k (39.0k) | 39k | 36k (37.8k) | 3.030 | 1.650 |
| -6 | +6 | 47k (46.8k) | 39k | 33k (32.6k) | 3.636 | 1.650 |
| -9 | +9 | 82k (70.2k) | 39k | 27k (26.4k) | 5.455 | 1.650 |
| -12 | +12 | 100k (93.6k) | 39k | 25k (24.2k) | 7.273 | 1.650 |
| -15 | +15 | 120k (117k) | 39k | 22k (22.9k) | 9.091 | 1.650 |
| -18 | +18 | 150k (140k) | 39k | 22k (22.2k) | 10.909 | 1.650 |
| -24 | +24 | 250k (226k) | 47k | 22k (25.8k) | 14.546 | 1.650 |
| -36 | +36 | 330k (338k) | 47k | 22k (24.8k) | 21.818 | 1.650 |
| -48 | +48 | 470k (451k) | 47k | 22k (24.4k) | 29.091 | 1.650 |
I valori non in parentesi sono i valori consigliati utilizzando resistori con valori standardizzati. I valori nelle parentesi sono invece i valori esatti calcolati con le formule. I coefficienti K1 e K2, da utilizzare nelle formule semplificate del capitolo precedente, sono stati calcolati per i resistori con valori standardizzati.
Se si volessero utilizzare altri valori, si consiglia di scegliere per R1 un valore leggermente maggiore di quello calcolato e per R3 un valore leggermente minore, altrimenti il range di ingressi potrebbe essere insufficiente e una parte delle tensioni di ingresso verrebbe limitata.
I valori di queste tabelle provocano errori di misura dovuti alle correnti di perdita inferiori ai 5 milli-volt (relativi ai 3,3 volt di ingresso), caricano il segnale con correnti di circa 100 uA e permettono di sopportare extra-tensioni circa doppie rispetto alla tensione massima indicata nella tabella.
Utilizzando valori resistivi dieci volte inferiori gli errori di misura diminuiscono (0.5 millivolt massimi), ma il segnale viene caricato con circa 1 mA di corrente e i disturbi sopportabili scendono a solo il 15% oltre alla tensione massima indicata nella tabella.
Viceversa utilizzando valori resistivi dieci volte maggiori gli errori di misura aumentano (50 millivolt massimi), il segnale viene caricato con circa 10 uA di corrente e i disturbi sopportabili aumentano fino a dieci volte la tensione massima indicata nella tabella.
Questi calcoli sono basati sulla massima corrente di perdita degli ingressi del modulo master (+/- 500 nA) e sulla massima corrente sopportabile dagli ingressi (100 uA massimi quando si superano i 3.6 volt o si scende sotto agli 0.3 volt negativi).
Le tensioni di ingresso da 0 a 3.3 volt non avrebbero bisogno di questo circuito ma utilizzando un resistore da 10k (o da 1k fino a 100k come spiegato prima), in abbinamento con il condensatore C1, si ottiene un filtraggio che protegge la comunicazione USB in caso di extra-tensioni.
Calcolare le tensioni di ingresso e uscita
In questa sezione pubblichiamo formule utili per chi scrive applicazioni e dovesse calcolare le tensioni di ingresso a partire da quelle misurate o viceversa.
Nelle formule seguenti Vin è la tensione in arrivo dai sensori, Vout quella che va al Master e Vpos la tensione che si applica ad R2 quando si usano partitori a tre resistori, per tensioni di ingresso positive e negative. Normalmente Vpos è di 5 volt e arriva dalla porta USB attraverso il modulo Master. La tensione USB non è perfettamente stabile per cui in alcuni casi si potrebbero ottenere misure più precise interponendo uno degli stabilizzatori dei 5 volt pubblicati in questa stessa pagina.
Calcolare la tensione di uscita in base alla tensione di ingresso
- Partitore a due resistori: Vout = Vin * R3 / (R1 + R3)
- Partitore a tre resistori: Vout = (Vin * R2 + Vpos * R1) / (R1 + R2 + R1 * R2 / R3)
- Partitore a tre resistori semplificato: Vout = Vin / K1 + K2
Calcolare la tensione di ingresso conoscendo la tensione in uscita
- Partitore a due resistori: Vin = Vout * (R1 + R3) / R3
- Partitore a tre resistori: Vin = Vout * (R1 / R2 + R1 / R3 + 1) – Vpos * R1 / R2
- Partitore a tre resistori semplificato: Vin = (Vout – K2) * K1
Calcolare la tensione di ingresso (in Volt)
conoscendo il valore misurato dall’ADC (da 0 a 1000)
- Partitore a due resistori: Vin = Vadc * 0.0033 * (R1 + R3) / R3
- Partitore a tre resistori: Vin = Vadc * 0.0033 * (R1 / R2 + R1 / R3 + 1) – Vpos * R1 / R2
- Partitore a tre resistori semplificato: Vin = (Vadc * 0.0033 – K2) * K1
Coefficienti K1 e K2 da utilizzare nelle formule semplificate
I coefficienti K1 e K2 si ricavano dalle tabelle seguenti e sono stati calcolati per partitori che utilizzano i resistori con valori standardizzati (i valori che non sono tra parentesi nelle tabelle).
Se si utilizzano resistori con valori diversi da quelli listati nelle tabelle si possono ricalcolare K1 e K2 con le due formule seguenti:
- K1 = R1 / R3 + R1 / R2 + 1
- K2 = Vpos / (R2 / R1 + R2 / R3 + 1)
Formule per calcolare i resistori
Le formule di calcolo dei resistori sono complesse, per metterle a punto abbiamo lavorato molti giorni con l’aiuto delle applicazioni Theremino_MathHelper e GraspableMath, per cui consigliamo di utilizzare i valori pre-calcolati delle tabelle precedenti.
Pubblichiamo queste formule a scopo didattico dato che in rete si trova ben poco su questo argomento (si trova qualcosa per calcolare le tensioni quando si conoscono i resistori, ma niente per calcolare i resistori a partire dalle tensioni e assolutamente niente per i partitori a tre resistori).
Per calcolare i resistori di un partitore si devono stabilire:
- Il range di tensioni di ingresso (VinMin e VinMax)
- Il range di tensioni di uscita (VoutMin e VoutMax)
- La tensione positiva disponibile (Vpos) per i partitori che accettano ingressi anche negativi.
- Il valore di uno dei resistori (non troppo basso per non caricare troppo l’ingresso e non troppo alto per non introdurre errori di misura troppo grandi).
Poi si utilizzano le formule seguenti e si calcolano gli altri resistori.
Partitori con ingresso solo positivo, calcolare R1 a partire da R3:
- R1 = R3 * (VinMax / VoutMax – 1)
Partitori con ingresso solo positivo, calcolare R3 a partire da R1:
- R3 = R1 * VoutMax / (VinMax – VoutMax)
Partitori con ingresso negativo e positivo, calcolare R2 e R3 a partire da R1
- R2 = (R1 * Vpos * (VoutMax – VoutMin)) / (VinMax * VoutMin – VinMin * VoutMax)
- R3 = (R1 * VoutMax * R2) / (R1 * (Vpos – VoutMax) + R2 * (VinMax – VoutMax))
Partitori con ingresso negativo e positivo, calcolare R1 e R3 a partire da R2
- R1 = (VinMin * VoutMax * R2 – VinMax * VoutMin * R2) / (Vpos * (VoutMin – VoutMax))
- R3 = (R1 * VoutMin * R2) / (R1 * (Vpos – VoutMin) + R2 * (VinMin – VoutMin)
Partitori con ingresso negativo e positivo, calcolare R2 e R1 a partire da R3
- R2 = (R3 * (VinMax * (Vpos – VoutMin) + VinMin * (VoutMax – Vpos) + Vpos * (VoutMin – VoutMax))) / (VinMax * VoutMin – VinMin * VoutMax)
- R1 = (R3 * R2 * (VoutMin – VinMin)) / (R3 * (Vpos – VoutMin) – VoutMin * R2)
Download del progetto
Download del progetto completo del PCB in formato Eagle, file Gcode per la fresa e immagini 3D:
Adapter_Voltage
Adattatori da PWM a tensione variabile
Per pilotare i seguenti adattatori, si parte da un Pin configurato come Pwm8, Pwm16 o FastPwm.
I tipi Pwm8 e Pwm16 hanno un frequenza di commutazione fissa a 250 Hz e una precisione di circa una parte su 5000,
Il tipo FastPwm potrebbe essere regolato da 1 KHz fino a 20 KHz. Con 1 KHz la risoluzione è di una parte su 65000. Salendo di frequenza si diminuisce la risoluzione ma diminuisce anche il rumore residuo delle commutazioni. Il migliore compromesso tra risoluzione e rumore si ottiene con una frequenza di 15 Khz.
Da Pwm a 3.3 Volt
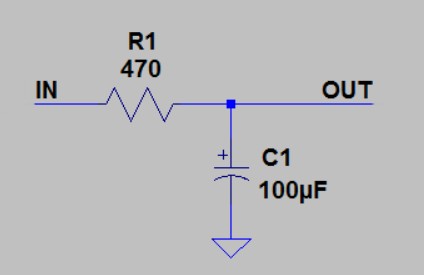 Con questo semplice circuito si ottiene una tensione di uscita variabile da 0 a 3.3 Volt, una tensione continua abbastanza stabile (meno di 100 mV di rumore residuo), e un tempo di risposta di una frazione di secondo.
Con questo semplice circuito si ottiene una tensione di uscita variabile da 0 a 3.3 Volt, una tensione continua abbastanza stabile (meno di 100 mV di rumore residuo), e un tempo di risposta di una frazione di secondo.
Da FastPwm a 3.3 Volt
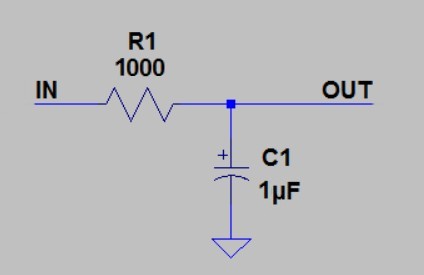

Generando il segnale con un Pin configurato come FastPwm e regolato per una frequenza di 15 kHz, si ottiene un residuo di rumore più basso. Dato che si parte da una frequenza più alta si può ridurre il condensatore di filtro a 1 uF e ottenere una risposta più rapida.
Da Pwm o FastPwm a 0..5 Volt
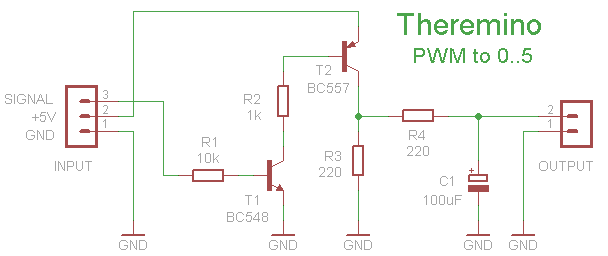
Questa versione ha le stesse caratteristiche delle precedenti, ma la tensione di uscita varia da 0 a 5 Volt (invece che da 0 a 3.3 Volt).
Per avere una risposta più rapida e un rumore residuo inferiore, si può usare una uscita di tipo FastPwm (con frequenza di 15 KHz) e diminuire C1 a 1 uF.
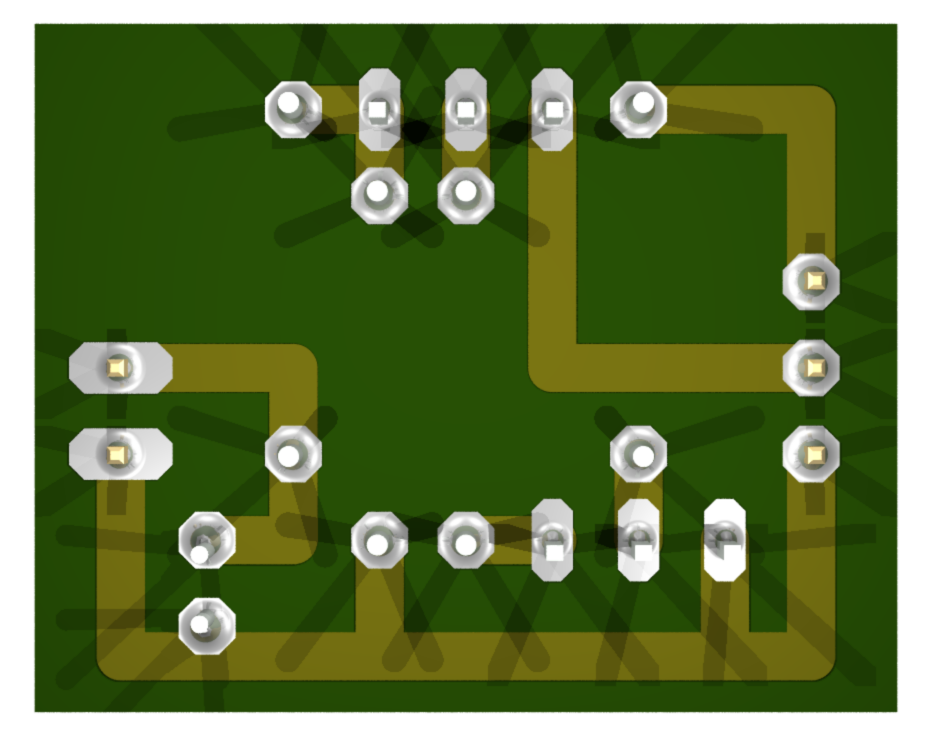 Il progetto del PCB è completamente a passo 2.54 mm. Costruirlo su una basetta mille fori (da 9 x 7 fori) è davvero facile. Si mettono i componenti da sopra, si gira e si usano gli stessi fili dei resistori, per effettuare i pochi collegamenti necessari.
Il progetto del PCB è completamente a passo 2.54 mm. Costruirlo su una basetta mille fori (da 9 x 7 fori) è davvero facile. Si mettono i componenti da sopra, si gira e si usano gli stessi fili dei resistori, per effettuare i pochi collegamenti necessari.
Download del progetto in formato Eagle, file Gcode per la fresa, immagini 3D e simulazioni:
Adapter_PwmTo05
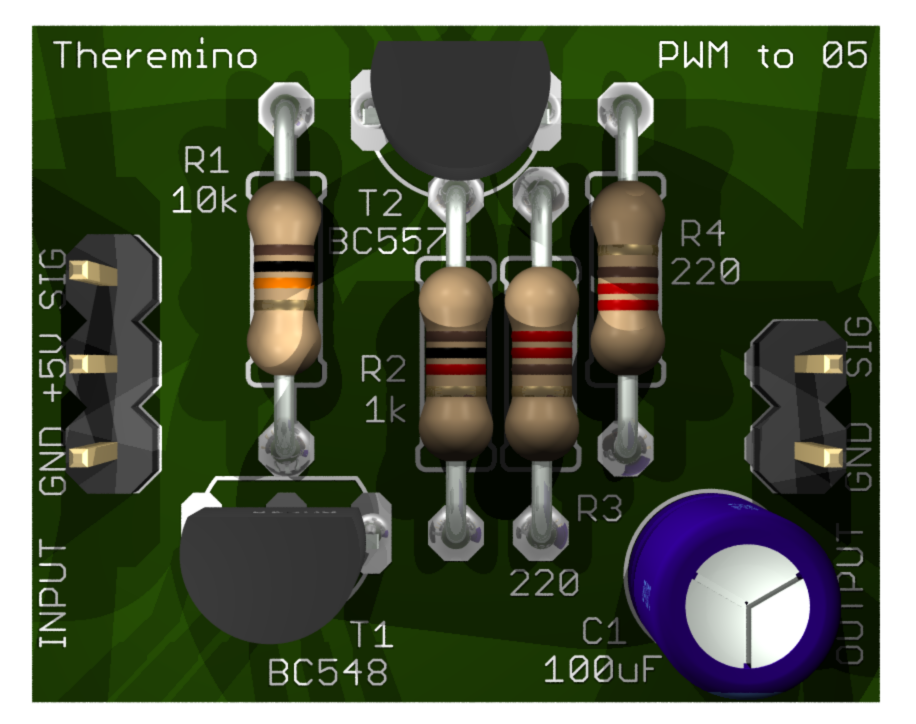
Da Pwm_16 a 0..10 Volt
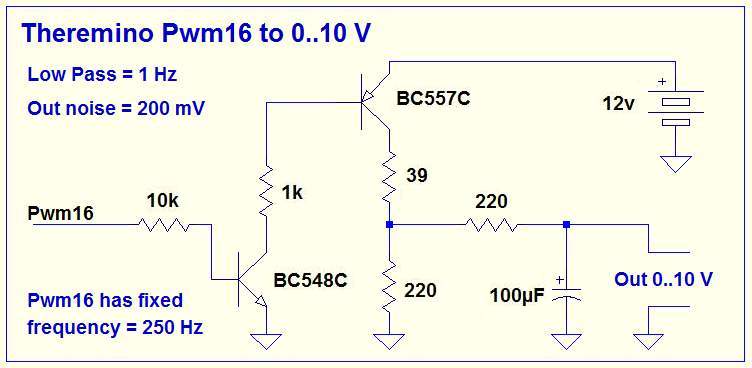
Disponendo di una tensione di 12 Volt, e con una piccola variazione del circuito precedente, si può generare una uscita con escursione da 0 a 10 volt.
La corrente assorbita dal 12 Volt è inferiore a 100 mA, per cui qualunque piccolo alimentatore può andare bene.
Modificando il valore del resistore da 39 ohm si potrebbe anche utilizzare un alimentatore con tensione diversa da 12 Volt, secondo la tabella seguente:
- Alimentatore da 10 Volt, resistore = 0 ohm
- Alimentatore da 12 Volt, resistore = 39 ohm
- Alimentatore da 15 Volt, resistore = 110 ohm
- Alimentatore da 18 Volt, resistore = 180 ohm
- Alimentatore da 24 Volt, resistore = 300 ohm
Da Fast_Pwm a 0..10 Volt
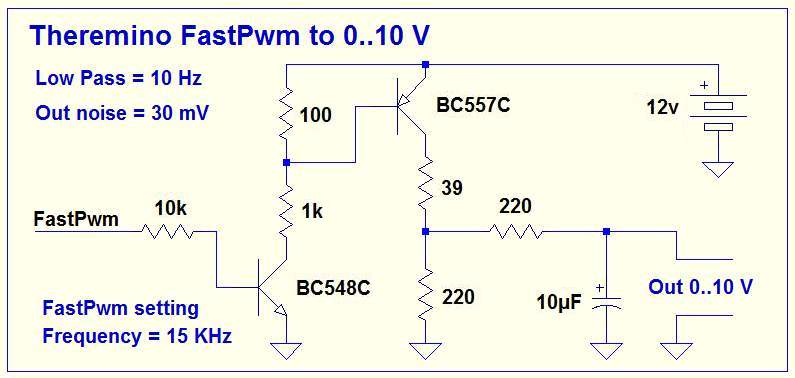
In questo circuito è stato aggiunto un resistore da 100 ohm e diminuito il condensatore di uscita per velocizzare la risposta e poterlo pilotare con una uscita Fast_Pwm regolata a 15 KHz.
In questo modo si ottiene un rumore di uscita quasi dieci volte inferiore e una velocità di risposta dieci volte maggiore.
La corrente assorbita dal 12 Volt è inferiore a 100 mA, per cui qualunque piccolo alimentatore può andare bene.
Modificando il valore del resistore da 39 ohm si potrebbe anche utilizzare un alimentatore con tensione diversa da 12 Volt, secondo la tabella seguente:
- Alimentatore da 10 Volt, resistore = 0 ohm
- Alimentatore da 12 Volt, resistore = 39 ohm
- Alimentatore da 15 Volt, resistore = 110 ohm
- Alimentatore da 18 Volt, resistore = 180 ohm
- Alimentatore da 24 Volt, resistore = 300 ohm
Da PWM a 5 Volt, con basso rumore e risposta veloce
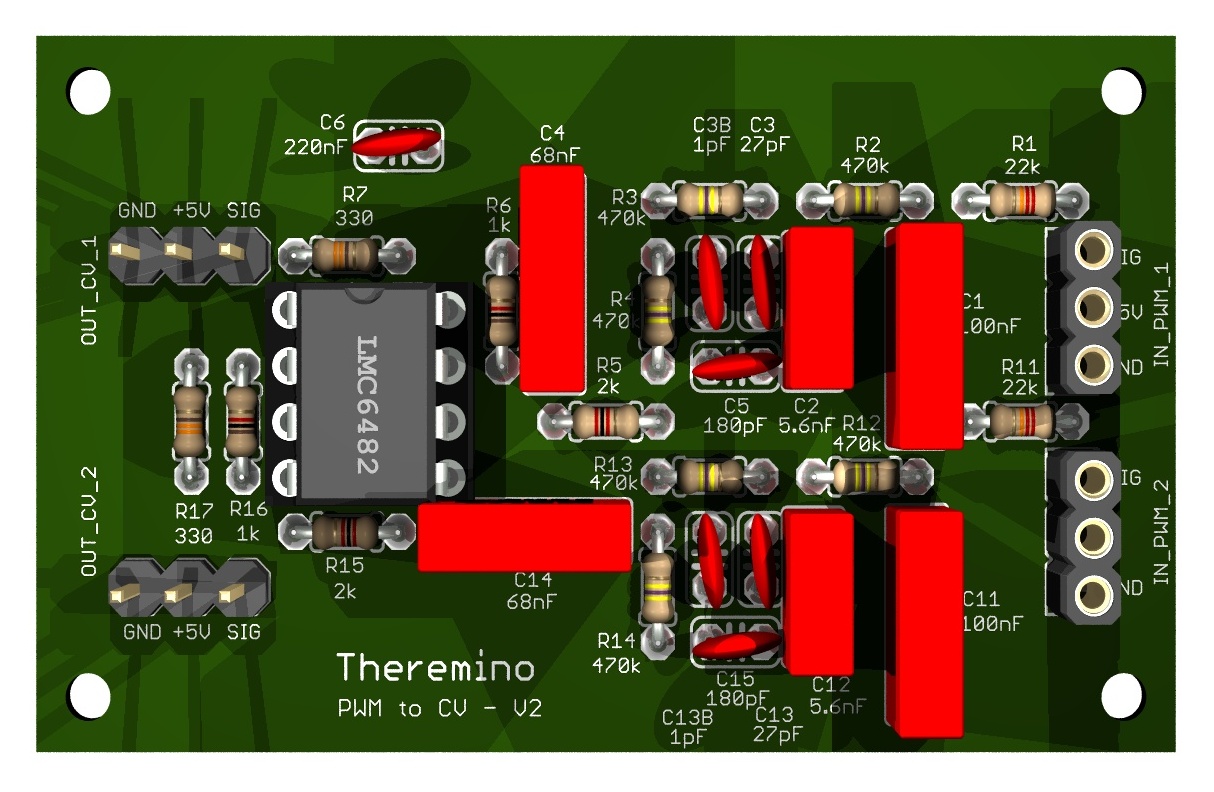 Per chi vuole il massimo delle prestazioni, ecco la versione più elaborata. Progettata per controllare i sintetizzatori Vintage, ha un residuo di rumore di pochi millivolt e velocità di risposta intorno al centesimo di secondo.
Per chi vuole il massimo delle prestazioni, ecco la versione più elaborata. Progettata per controllare i sintetizzatori Vintage, ha un residuo di rumore di pochi millivolt e velocità di risposta intorno al centesimo di secondo.
Il progetto completo di questa versione è nella pagina dedicata alla musica. Fare click su questo collegamento: Pwm to ControlVoltage
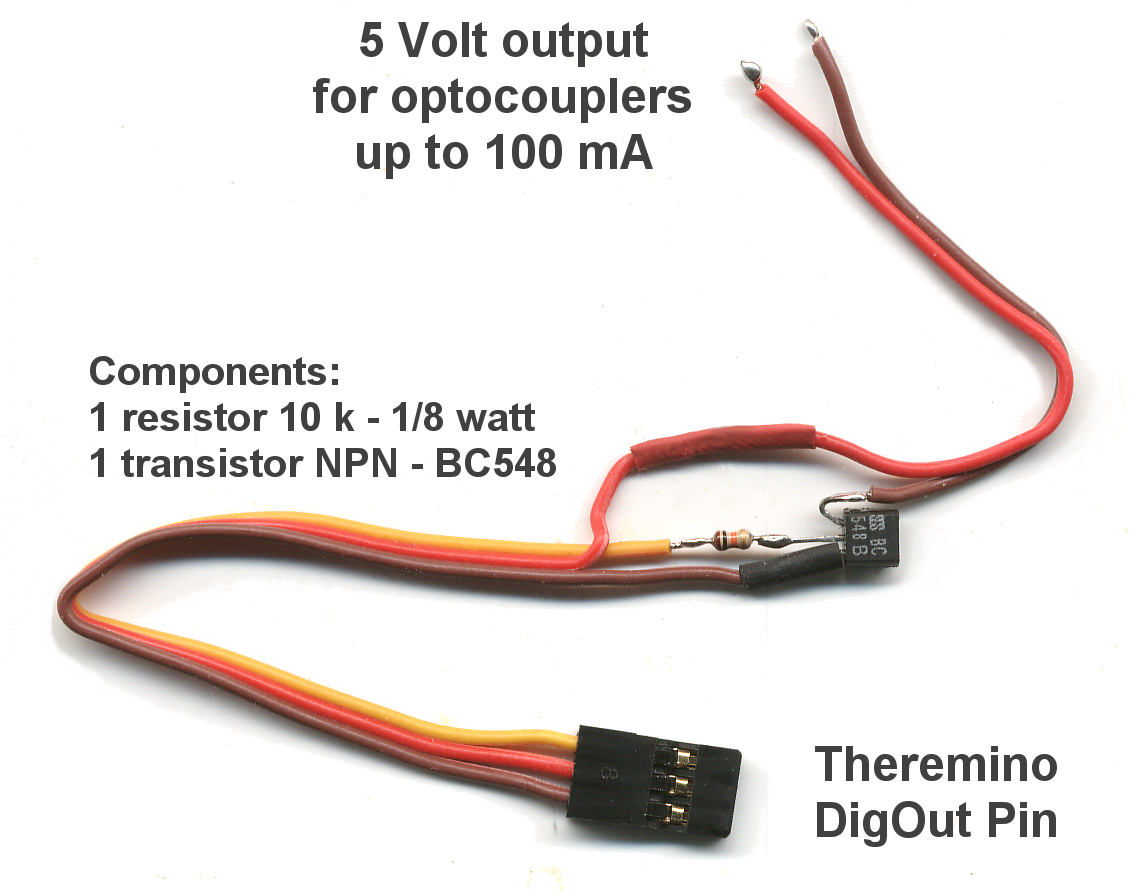
Adattatori per pilotare foto-accoppiatori
Alcuni dispositivi, ad esempio alcuni driver per motori stepper, hanno gli ingressi foto accoppiati. Normalmente questi foto accoppiatori funzionano bene pilotandoli con Pin configurati come Stepper o come DigOut. Ma in alcuni casi, a seconda del circuito interno dei driver, gli ingressi foto accoppiati possono non accontentarsi, della tensione e della corrente che gli inviamo. In questi casi potrebbero funzionare male o non funzionare proprio.
In tutti i casi è bene controllare, nelle caratteristiche del dispositivo, che possa funzionare con ingressi di 3.3 Volt e con 5 mA o meno. Nel caso che 3.3 Volt non bastino, oppure se si ha il dubbio di lavorare al limite della tensione o corrente necessari, si può interporre questo adattatore.
 Fare click sulla immagine per ingrandirla.
Fare click sulla immagine per ingrandirla.
Attenzione che l’uscita di questo adattatore non è riferita a massa. Quindi la si deve collegare solo a dispositivi isolati (come sono i foto-accoppiatori). Si potrebbero anche pilotare piccoli relè o motori (sempre isolati da tutto) ma in tal caso si dovrebbe aggiungere un diodo di protezione, come in questo esempio.
Adattatori per pilotare foto-accoppiatori (con circuito stampato)
Questa è la versione di lusso dell’adattatore precedente. Se si dispone del circuito stampato e dei componenti SMD, si ottiene un montaggio professionale. Probabilmente potrete trovare questa versione, sia in kit che montata e collaudata, sul sito Store-ino.
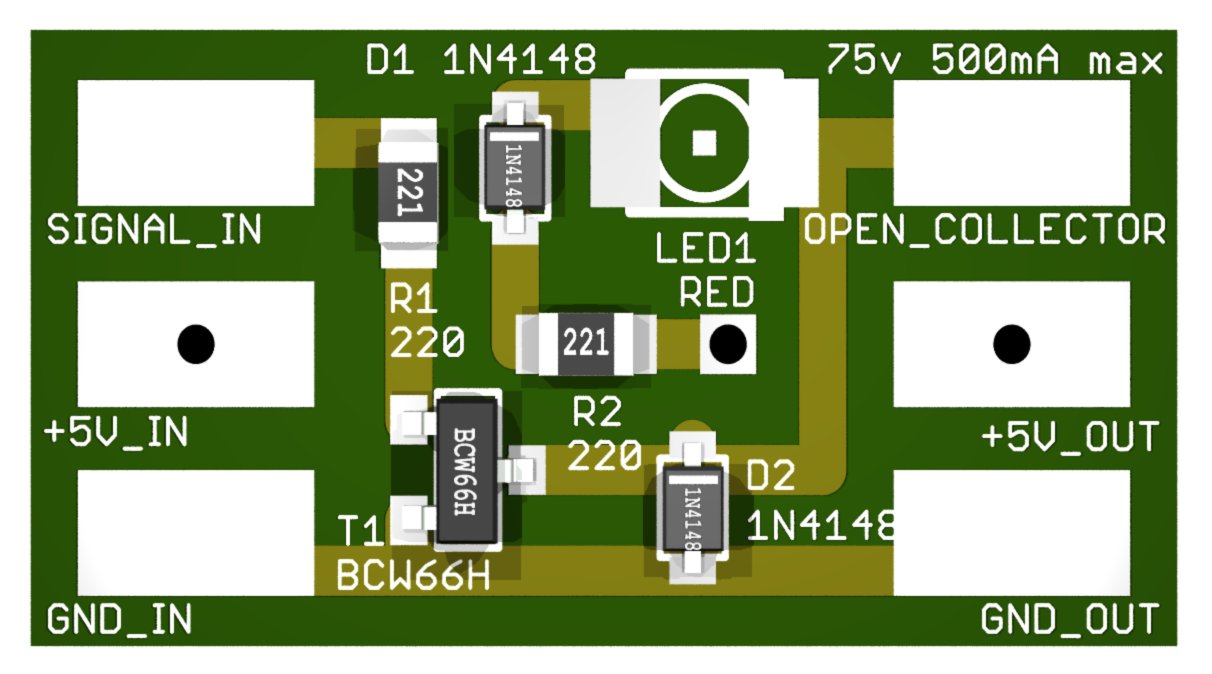
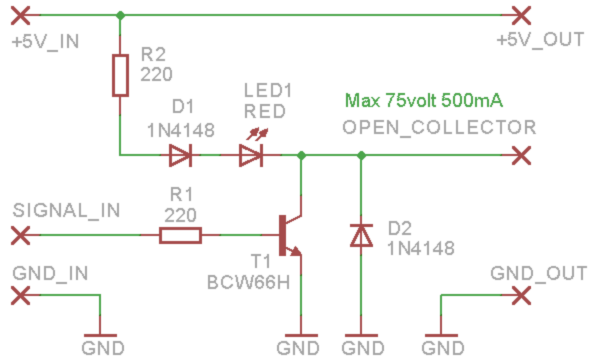
Il diodo D2 elimina le extra-tensioni negative nel caso che si pilotassero carichi induttivi, ad esempio motori o relè. In questi casi è comunque bene aggiungere un ulteriore diodo in parallelo al carico.
Il LED rosso si illumina quando il carico viene alimentato ed è un comodo aiuto visivo per controllare il buon funzionamento delle apparecchiature che si costruiscono.
Questi adattatori, oltre che per pilotare foto-accoppiatori a 5 volt, sono utilizzabili in tutti i casi dove si devono pilotare carichi di piccola e media potenza, fino a 500 mA e fino a 75 volt.
Il progetto completo in formato Eagle, nonché le immagini e molti altri file utili, tra cui i data-sheet dei componenti usati, si scaricano con questo file.
Regolatore stabilizzato a 5 Volt
Alcuni sensori necessitano di una tensione di alimentazione molto stabile. A volte sono indicati come “ratiometric”, cioè con tensione di uscita che è una frazione (ratio), della tensione di alimentazione. Altri sensori, semplicemente, non sono stabilizzati internamente e generano un segnale meno rumoroso, se li si alimenta con tensione stabilizzata.
Il 5 Volt in arrivo dalla USB o da alimentatori esterni non è mai preciso. In alcuni casi varia anche del 10% (da 4.5 Volt fino a 5.5 Volt). Inoltre alcuni PC e Notebook forniscono un 5 Volt molto rumoroso, con rapide variazioni, anche di molte centinaia di millivolt.
In alcuni casi si potrebbe usare la tensione stabilizzata a 3.3 Volt, che è disponibile sul connettore ICSP dei moduli Master, Servo e CapSensor. Oppure si potrebbero usare i regolatori a 3.3 Volt o 4.2 Volt di questa pagina. Ma alcuni sensori vogliono proprio il 5 Volt.
Se i sensori sono molti, potrebbe essere utile interporre questo regolatore lungo la linea seriale che va dal Master agli Slave. Così si otterrebbe di stabilizzare in un colpo solo tutti i sensori e i moduli che si trovano a valle del regolatore. Stabilizzare i sensori collegati ai Pin del Master è un po’ più difficile (eventualmente leggere il data sheet del Master per individuare il punto dove si potrebbe interrompere il 5 Volt che va ai Pin).


Questo adattatore genera il 5 Volt a partire dai 5 Volt instabili, provenienti della USB, La prima parte del circuito è uno Step-Up, di tipo Flyback, che genera circa 7 Volt. La seconda parte è un regolatore lineare che genera un 5 Volt ultra stabile, preciso e poco rumoroso.
Una caratteristica che molti apprezzeranno è di usare solo componenti comuni. La bobina può essere estratta dalle lampade fluorescenti e i resistori possono essere anche da 1/4 Watt (messi in piedi). E, con un po’ di attenzione, lo si può costruire anche su una basetta mille-fori.
La massima corrente di uscita è circa 100 mA, quindi si può usarlo per stabilizzare molti sensori contemporaneamente. Non tutti i sensori hanno bisogno di un 5 Volt ultra stabile, ma a volte può essere utile alimentare tutto attraverso un solo regolatore. In questi casi si devono fare le somme delle correnti parziali per verificare di stare nei 100 mA disponibili.
Le tabelle seguenti elencano il consumo dei principali sensori e moduli del sistema Theremino.
Moduli e sensori che necessitano del 5 Volt stabilizzato
HIH4000 (umidità): 0.5 mA
MPXA6115 (pressione): da 6 a 10 mA
Sensori FGM1 e FGM3 (geomagnetici): 12 mA
Sensori di campo magnetico (A1301 e A1302): 11 mA
Accelerometro triplo LIS344 (direttamente dal 5 Volt): 0.7 mA
Moduli e sensori che traggono minimi vantaggi dal 5 Volt stabilizzato
LM35 (temperatura): 0.1 mA
AD592 (temperatura da -25 a +105 gradi): 0.4 mA
Sonda ultravioletti (UVM30): 0.1 mA
PMT adapter (fotomoltiplicatori per raggi Gamma): da 10 a 30 mA
Moduli e sensori che devono essere alimentati a 3.3 Volt
Sonda ultravioletti (ML8511): 0.3 mA
Moduli e sensori che non necessitano del 5 Volt stabilizzato
Sensori per fulmini e campi elettromagnetici: da 2.5 a 4 mA
Sensori per i dischetti piezoelettrici: 0.01 mA
Preamplificatore camera a ioni (versione 5): 8mA
Alimentatore 475 volt per le camere a ioni: da 10 a 20 mA
Accelerometro triplo LIS344 (collegato al triplo preamp.): 0.7 mA
Pre-amplificatore triplo per accelerometri: 2 mA
Pre-amplificatore “GeoPreamp” per i geofoni: 0.3 mA
Sensori per la spettrometria delle polveri: da 10 a 20 mA
Moduli con operazionale LMC6482: circa 1 mA
Madulo slave “Servo”: 10 mA
Modulo slave “CapSensor”: 12 mA
Modulo “Master”: 12 mA
Download del progetto completo del PCB in formato Eagle, file Gcode per la fresa e immagini 3D:
Adapter_Stab5V_V1.2
Regolatore stabilizzato a 5 Volt versione piccola


Questo adattatore è molto più piccolo del precedente. La tensione di uscita è molto precisa ma un po’ più rumorosa (niente paura… siamo sempre nella zona delle centinaia di micro Volt).
Si chiama Geomagnetic perché è stato sviluppato per i sensori FGM1 e FGM3, ma è utile anche per altri sensori, ad esempio i sensori di pressione atmosferica MPXH6115A e quelli di umidità HIH4000.
La tensione di alimentazione può variare da 3.5 a 5.5 Volt e l’uscita è di 5 Volt precisi. La aggiunta di un pre-regolatore a 3.3 Volt aumenta ulteriormente la stabilità alle variazioni della tensione di ingresso. Se il pre-regolatore non è necessario, basta eliminarlo, unendo C1 con C2 con un filo (in questo caso la tensione di ingresso potrà variare da 2 a 5.5 Volt). La corrente massima di uscita è intorno ai 150 mA, quindi uno solo di questi adattatori potrebbe alimentare molti sensori. Ad esempio una decina di FGM1 o FGM3, che consumano 12 mA l’uno.

Oltre a stabilizzare la tensione questo adattatore abbassa il segnale del sensore (solitamente da zero a 5 Volt), verso i valori di tensione adatti agli ingressi del sistema theremino (da zero a 3.3 Volt). Se questo adattamento non serve si elimina R2.
Download del progetto completo con PCB in formato Eagle, file Gcode per la fresa e immagini 3D:
GeomagneticAdapterV2
Regolatore stabilizzato a 3.3 Volt
Alcuni sensori, i potenziometri ad esempio, funzionano meglio se li si alimenta con una tensione stabilizzata di 3.3 Volt, altri sensori, come i sensori magnetici e gli Accelerometri, necessitano di una tensione da 3.3 Volt ben stabilizzata.
La tensione di 3.3 Volt è disponibile su tutti i moduli del sistema Theremino sul connettore ICSP. Per ottenere il minimo rumore possibile, o per esigenze di cablaggio, la tensione di 5 Volt può essere abbassata a 3.3 Volt e stabilizzata con un adattatore.
Ecco un adattatore semplice, poco costoso e piccolissimo che può essere usato con i cavetti standard maschio-femmina. Una versione di questo adattatore, senza connettori, può essere saldata lungo il cavo e coperta con un tubetto di guaina termo-restringente ottenendo un cablaggio piccolo e robusto.


In genere i costruttori consigliano di posizionare il condensatore (e quindi tutto l’adattatore) in prossimità del sensore per cui è bene tenere la parte di filo tra adattatore e sensore non più lunga di qualche centimetro. Per alcuni sensori viene consigliato un condensatore piuttosto alto (10 uF) in questo caso si potrebbe aumentare il C2 (usare sempre condensatori SMD ceramici che costano molto meno degli elettrolitici, hanno una bassa impedenza e sono molto piccoli – 0805 o 0603) In tutte le nostre prove, anche con i sensori più esigenti, abbiamo verificato che il C2 da 1 uF è sufficiente, perché aiutato dal regolatore che stabilizza bene la tensione anche a frequenze medio-alte. Il C1 si può sicuramente ridurre a 100 nF e probabilmente lo ridurremo nelle prossime versioni per diminuire la capacità totale sulla linea USB che è data per un massimo di 4.7 uF.
Download del progetto completo del PCB in formato Eagle, file Gcode per la fresa e immagini 3D:
Adapter_Stab
Regolatore stabilizzato a 4.2 Volt
Alcuni sensori, ad esempio gli HIH4000 e HIH4030, possono venire alimentati con 4.2 Volt stabilizzati e fornire una escursione di uscita da 0 a 3.3 Volt. In questi casi si evita di dover aggiungere il partitore (da 5 a 3,3) o il resistore di limitazione (solitamente da 33k).
Non è possibile usare i regolatore classici (ad esempio gli LM317) perché hanno una caduta di tensione minima di quasi 2 Volt. Si devono per forza usare regolatori di tipo LDO. Attualmente (2014) i migliori LDO sono quelli della serie AP2125.
Il regolatore AP2125N-4.2TRG1, produce una tensione di 4.2 Volt molto stabile e poco rumorosa. La piedinatura è la stessa degli MCP1700, per cui si possono usare gli stessi schemi della sezione precedente.



Lo AP2125N-4.2TRG1 è anche molto economico:
Codice Mouser: 621-AP2125N-4.2TRG1
Package: SOT-23-3
MarkingID: GJ3
Price (approx): 0.3 Euro
Esiste anche la versione da 3.3 Volt che può sostituire gli MCP1700. Stessa piedinatura ma costo minore e migliori caratteristiche di stabilizzazione e rumore.
Codice Mouser: AP2125N-3.3TRG1
Package: SOT-23-3
MarkingID: GJ7
Price (approx): 0.3 Euro
Qui si scarica il data sheet di tutta la serie di AP2125N, da 1.8 Volt a 4.2 Volt
http://www.mouser.com/ds/2/115/AP2125-271646.pdf
Download del progetto completo del PCB in formato Eagle, file Gcode per la fresa e immagini 3D:
Adapter_Stab
Adattatore di alimentazione
Quando si supera la corrente massima della porta USB (500 mA) si possono verificare errori di trasmissione, distacchi della linea USB e messaggi di errore da parte del PC.
Anche se il consumo medio è abbastanza basso può accadere di superare la corrente massima durante lo spunto dei motori o in altre brevi occasioni. Inoltre alcuni PC sono molto sensibili anche a punte di consumo molto brevi e interrompono immediatamente l’alimentazione.
Si può tentare di aumentare la corrente massima prelevando la corrente da due porte USB con un cavo apposito ma solitamente l’unica vera soluzione è interrompere la linea di alimentazione nel punto più opportuno e inserire un alimentatore esterno con questo adattatore.





L’alimentatore esterno solitamente sarà da 5 Volt 2A e fino a 5 Ampere in alcuni casi. Se necessita una corrente maggiore (fino a 10 o 20 ampere) non si possono più usare i cavetti standard ma devono usare piattine trifilari in silicone di buona qualità saldate direttamente oppure avvitate alla versione di adattatore con connettori a vite della pagina seguente.
Questi adattatori possono essere costruiti facilmente, anche senza circuito stampato, usando un piccolo ritaglio di basetta millefori.
Adattatore di alimentazione versione con connettori a vite
Per correnti superiori a 2 Ampere si deve usare questo adattatore con connettori a vite e cavi di grande diametro come specificato nella sezione “Cavi di connessione”
Fino a 5 Ampere usare cavi da 20 AWG (0.52 mmq)
Fino a 10 Ampere usare cavi da 16 AWG (1.3 mmq)




Questi adattatori si costruiscono facilmente, anche senza circuito stampato, usando un piccolo ritaglio di basetta millefori.
Limitatore di corrente
Questi limitatori di corrente seguiti da un elettrolitico di grande capacità possono risolvere anche le situazioni più difficili senza dover aggiungere un alimentatore esterno. La limitazione è molto precisa, molto migliore di quella dei PTC normalmente usati nell’USB e in caso di corti circuiti l’uscita “si spegne”, e si “riaccende” automaticamente non appena si rimuove il corto (funzionamento a “foldback”).
Il limitatore deve essere interposto tra il +5 Volt che arriva dalla USB e la pista di alimentazione che va ai Pin.


Cambiando i valori dei resistori è possibile scegliere la corrente massima.
Il limitatore deve essere interposto tra il +5 Volt che arriva dalla USB e la pista di alimentazione che va ai Pin, si può fare sia sul Master sia sugli Slaves tagliando la pista che porta il +5Volt ai Pin e saldando tre fili.
Attenzione: Si deve limitare solo l’alimentazione dei Pin di In-Out, non la alimentazione dei processori. Non posizionate limitatori lungo la linea seriale.
E’ facilissimo costruire questa versione (non SMD) anche senza circuito stampato, usando un piccolo ritaglio di basetta millefori. Tutti i componenti sono a passo 2.54 mm (distanza tra i fori), quindi con gli stessi terminali dei resistori si fanno i collegamenti sul retro e in pochi minuti si finisce.
Download del progetto Eagle, immagini in 3D e simulazioni LTSpice, del limitatore in versione ThruHole: Adapter_Limiter
Limitatore di corrente versione SMD
Questi limitatori di corrente seguiti da un elettrolitico di grande capacità possono risolvere anche le situazioni più difficili senza dover aggiungere un alimentatore esterno. La limitazione è molto precisa, molto migliore di quella dei PTC normalmente usati nell’USB e in caso di corti circuiti l’uscita “si spegne”, e si “riaccende” automaticamente non appena si rimuove il corto (funzionamento a “foldback”)


Cambiando i valori dei resistori è possibile scegliere la corrente massima.
Il limitatore deve essere interposto tra il +5 Volt che arriva dalla USB e la pista di alimentazione che va ai Pin, si può fare sia sul Master sia sugli Slaves tagliando la pista che porta il +5Volt ai Pin e saldando tre fili.
Attenzione: Si deve limitare solo l’alimentazione dei Pin di In-Out, non la alimentazione dei processori. Non posizionate limitatori lungo la linea seriale.
Download del progetto Eagle, immagini in 3D e simulazioni LTSpice del limitatore in versione SMD: Adapter_LimiterSMD
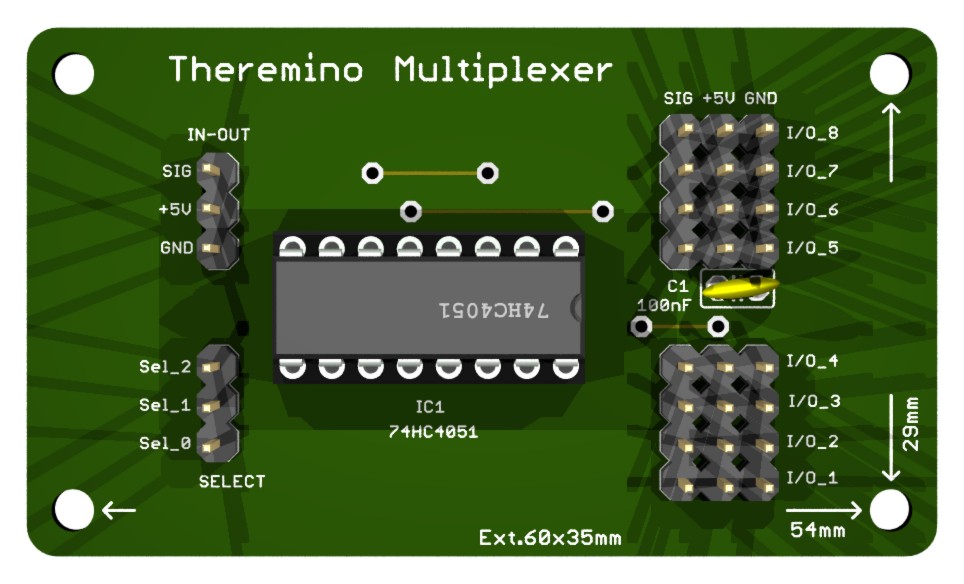
Moltiplicatore di ingressi e uscite
Il Theremino Multiplexer è un commutatore ad otto posizioni, che accetta segnali analogici e digitali di qualunque tensione da 0 a 5 Volt. I segnali possono viaggiare nelle due direzioni, da una uscita del Master verso otto attuatori, oppure da otto sensori verso un singolo ingresso del Master.
Alcuni esempi
– Collegare fino a otto Magnetometri a un singolo FastCounter.
– Collegare fino a otto Sensori a un singolo ingresso Adc16.
– Collegare fino a otto Relè a una singola uscita DigOut.
Caratteristiche
Il contatto chiuso è come un resistore molto basso (meno di 100 ohm). Il contatto aperto è come un resistore altissimo (circa 50 Mega ohm). Il consumo totale sulla alimentazione è di pochi micro Ampere. La corrente di perdita è inferiore a 100 nano Ampere. Il tempo di commutazione è inferiore ai 20 nS, il tempo di transito è di 12 nS e le capacità parassite sono di pochi pico Farad.
Sono caratteristiche simili a quelle di un commutatore meccanico, per cui si può usarlo fino a frequenze di 100 MHz e oltre.
Particolarità di questo adattatore
Prima di scegliere questo adattatore per le proprie applicazioni, fare attenzione che i sensori e gli attuatori potranno funzionare solo uno per volta. Inoltre per commutare da un canale all’altro ci vorrà un certo tempo (circa 50 mS per dare tempo all’HAL di eseguire con certezza la commutazione e anche un certo tempo, variabile a seconda dei sensori, per stabilizzare il segnale).
Quando lo si usa per moltiplicare le uscite (DigOut, Servo o Pwm), fare attenzione che le uscite non abilitate sono volanti. Quindi, in caso di attuatori con ingresso ad alta impedenza, per evitare attivazioni casuali, si dovranno aggiungere resistori da 10k verso massa ad ogni attuatore. I resistori non sono stati aggiunti al progetto di base, perché avrebbero impedito di leggere alcuni sensori.
Usare un 74HC4851 al posto del 74HC4051
Il classico 4051, che esiste da decine di anni, funziona benissimo ma, se possibile, sarebbe meglio usare un 4851, che ha una maggiore tolleranza ai disturbi sui canali non connessi (nel download del progetto ci sono i PDF di ambedue gli integrati). Ambedue gli integrati costano circa mezzo Euro e il 4851 è facilmente reperibile sia da Mouser che da Farnell, quindi l’unico motivo di usare il 4051 è di averne già qualcuno nei cassetti. Chi deve comprarli scelga decisamente il 4851.
Download del progetto
Il progetto del PCB è completamente a passo 2.54 mm. Costruirlo su una basetta mille fori è davvero facile. Si mettono i componenti da sopra, si gira la basetta e si usano piccoli fili singoli (ad esempio tagliati dai resistori), per effettuare i pochi collegamenti necessari.
Download del progetto completo del PCB in formato Eagle, file Gcode per la fresa e immagini 3D:
Theremino_Multiplexer
Adattatore per macchine CNC
Attenzione: Questo adattatore serve per sostituire la Parallela con la USB, e non per far funzionare Mach3 o Linux CNC (a meno che qualcuno scriva i relativi Plug-In). Noi non li scriveremo, sia perché preferiamo la semplicità di Theremino CNC, sia perché non conosciamo abbastanza Mach3 e Linux CNC.
Attenzione: I segnali di ingresso in arrivo dalla CNC (switch di fondo corsa ed emergenza), devono essere da 0 a 3.3 Volt. Nel caso siano da 0 a 5 Volt allora si deve interporre un resistore in serie da 100k (vicino al Master). Oppure ridurre l’escursione con un partitore resistivo (18k in serie e poi 10k verso massa). I segnali di uscita non hanno bisogno di adattatori perché sono segnali TTL standard (eventualmente controllare che la CNC possa funzionare con segnali TTL (da 0 a 3 Volt).


Qui si vedono le fasi preliminari della costruzione dell’adattatore (cliccare sulle immagini).
Servono qualche filo (piccolo e morbido), un connettore DB25 femmina, due piccole viti autofilettanti, tre connettori femmina a passo 2.54 (due da tre pin e uno da sei pin), un modulo Master (con firmware versione 3.2 o successive), e una piccola scatola in plastica.
La scatola di queste immagini è una Teko 10011 (dimensioni 90 x 56 x 23 mm), si può trovarla per 2 Euro, iva compresa, ad esempio da Webtronic. La sede per il connettore DB25, è un rettangolo largo 41 mm e alto 11 mm.
I fili non vanno saldati direttamente sul Master, ma sui connettori femmina. Usare solo connettori di buona qualità. I connettori buoni sono torniti e hanno i fori rotondi. I connettori con fori rettangolari non sono affidabili. Non fatevi ingannare dai venditori, che li vendono per Arduino. Le strisce di connettori con fori quadrati, fanno contatto per miracolo da nuove. Ma con il passare del tempo si ossidano, perdono l’elasticità e non fanno più contatto in modo affidabile.
Prima di iniziare il cablaggio, tutti i fili e i connettori, devono essere spellati e stagnati con cura, con buona lega di stagno, contenente piombo e disossidante.

Ecco l’adattatore finito. In questo caso, oltre ai classici segnali per gli assi X, Y e Z, sono stati collegati due fili (di colore arancione), per il pulsante di arresto di emergenza, e per il controllo di velocità, del motore del mandrino.


Queste due immagini mostrano le connessioni (fare click per ingrandire).
I Pin del Master per gli assi X, Y e Z sono i seguenti:
1 = X (step)
2 = X (direction)
3 = Y (step)
4 = Y (direction)
5 = Z (step)
6 = Z (direction)
Importanti considerazioni:
– Sul Master, questa disposizione è fissa (non modificabile da software).
– I corrispondenti Pin della parallela, vanno da 2 a 7, e non da 1 a 6, come sul Master.
Un singolo Master oltre agli assi X, Y e Z, può controllare altri quattro segnali con i Pin 7, 8, 9 e 10. Questi segnali possono essere IN-OUT generici, oppure possono controllare altri due motori stepper (che in Theremino CNC sono chiamati A e B).
Qui si vede, dove si trovano i Pin da 1 a 10, sul Master:
https://www.theremino.com/technical/pin-types
Qui si vede che i Pin 7, 8, 9 e 10, possono pilotare STEP e DIR di altri due motori stepper:
https://www.theremino.com/hardware/outputs/motors#drivers
Collegare i segnali speciali
I collegamenti speciali per il pulsante di emergenza, gli switch di fondo corsa, e il controllo della velocità del mandrino o della potenza del Laser, vanno studiati di volta in volta. Seguire i collegamenti, che vennero fatti per Mach3, la lista “Ports and Pins” di Mach3, e la documentazione di Theremino CNC.
Alcuni hardware di controllo dei motori stepper, oltre a fare il loro lavoro naturale (controllare i motori), si prendono la briga di controllare lo stato dei segnali su alcuni fili del connettore DB25 e di disabilitare i motori, nel caso non li trovassero di loro gradimento. I controller sono diversi tra loro e i segnali che vanno bene per uno potrebbero non piacere a un altro.
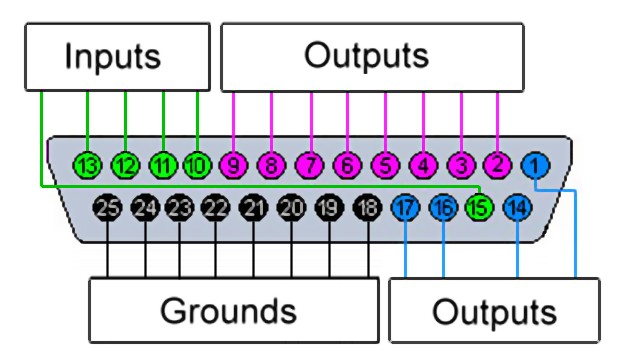
I pin del connettore DB25 cui prestare particolare attenzione sono: 10, 11, 12, 13 e 15. Questi pin sono solitamente usati per i segnali di emergenza e fondo corsa. Se i motori non si muovono si consiglia di collegarli tutti e cinque a massa. Se questo non bastasse si dovranno collegare a massa anche i pin 1, 14, 16 e 17.
Se i motori non si muovessero, nemmeno con tutti i pin di controllo a massa, allora sarà necessario studiare lo schema e le caratteristiche dell’hardware di controllo dei motori. Si consiglia anche di controllare che i pin di STEP (2, 4, 6 etc…) si muovano realmente.
Adattatore per piccoli Laser


Prima di presentare il Theremino LaserDriver parliamo un po’ dei diodi laser.
I diodi laser sviluppati per gli scrittori di DVD arrivano fino a mezzo watt e quelli per gli scrittori “BlueRay” arrivano quasi a 1 Watt (di potenza luminosa emessa). Concentrando il raggio, con apposite lenti, si possono incidere e tagliare piccoli spessori, di alcuni materiali (legno e plastica). I diodi laser devono essere pilotati con corrente, da 100 mA a 1 Ampere, a seconda del modello. I laser devono essere montati negli appositi cilindretti di alluminio, con lente regolabile, altrimenti scaldano troppo e si bruciano in pochi secondi.
Migliore è la qualità delle lenti e meglio si riuscirà a mettere a fuoco. Il puntino luminoso deve essere più piccolo possibile e si deve poter mantenere la lente abbastanza distante dal pezzo in lavorazione, per non sporcarla con il fumo (può essere utile un aspiratore).
I diodi laser sono molto delicati, basta poca corrente in più per bruciarli in un attimo. Si consiglia di non usarli oltre il 90% della loro massima corrente. Costa meno comprare subito un modello più potente, e tenerlo con corrente un po’ bassa, che tirare per il collo quelli piccoli, e bruciarne due o tre.
Su eBay si trovano contenitori con lente (da 5 a 10 Euro), diodi rossi da 100 mW a 500 mW (da 8 a 40 Euro) e viola da 200 mW a 900 mW (da 10 a 60 Euro). Potenze inferiori ai 200 mW non servono a niente, non tagliano e non incidono.
Laser rossi (circa 650 nm)
Praticamente sono tutti prodotti da Mitsubishi. I modelli che si trovano su eBay sono:
ML101J25 – 100 mW – Circa 10 Euro
ML101J27 – 130 mW – Circa 12 Euro
ML101J29 – 200 mW – Circa 12 Euro
ML101U29 – 150 mW – Circa 12 Euro
ML501P73 – 500 mW – Da 35 a 70 Euro
Non fidatevi dei dati che si leggono sulle pagine dei venditori eBay, perché spesso sono esagerati e possono portarvi a bruciare il laser in breve tempo. Uno dei trucchi più comuni è scrivere la potenza impulsiva al posto di quella continua. Abbiamo raccolto qui i data-sheet di tutti i laser che si trovano comunemente su eBay:
ML101J25 (658nm 100mW 150mA)
ML101J27 (660nm 130mW 200mA)
ML101J29 (658nm 200mW 280mA)
ML101U29 (660nm 150mW 200mA)
ML501P73 (638nm 500mW 600mA)
Laser viola (circa 405 nm)
Su eBay si trovano due modelli, tutti e due smontati dagli scrittori di BlueRay:
S06J – 700mW – Circa 30 Euro il solo diodo. Cui si dovranno aggiungere circa 10..20 Euro per il contenitore e le lenti.
BDR-209 – 900mW – Circa 40 Euro il solo diodo e fino a 60..80 Euro, già montati nel contenitore in rame e con lente in vetro “three element 405 AR coated glass lens”, che ha un rendimento maggiore delle lenti G-2 (circa 50 mW in più).
I data-sheet del laser viola non si trovano per cui riportiamo i dati principali, necessari per mettere a punto il Laser Driver:
S06J – Massima corrente consigliata 450 mA. A questa corrente la potenza di uscita è circa 700 mW e la tensione è circa 6 Volt.
BDR-209 – Massima corrente consigliata 600 mA. A questa corrente la potenza di uscita è circa 950 mW e la tensione è circa 6.5 Volt. Questo è il diodo più potente che si riesce ad avere a prezzi ragionevoli. Con le lenti buone e tirandolo un po’ per il collo si supera abbondantemente il Watt.

Grafico della tensione e della potenza del laser BDR-209 (fare click per ingrandire)
Laser blu (circa 445 nm)
Su eBay si trovano anche i laser blu, che sono molto potenti e costano anche poco. Ad esempio si può trovare il tipo M140, da 2 Watt, per soli 38 Euro. Ma non comprateli, hanno il raggio di luce più largo (0.5 mm contro 0.1 mm) per cui, anche se molto potenti, incidono meno di quelli viola.
Un secondo difetto dei laser blu è di essere poco efficienti (poco più di un milli-Watt di luce per ogni milli-Ampere di consumo). Per cui si deve pilotarli con oltre un Ampere e mezzo (contro i 500 mA dei laser viola) e diventa molto più difficile raffreddare il transistor di potenza e il resistore R4 del Laser Driver.
Pericolosità dei laser
I diodi laser rossi sono relativamente sicuri perché l’occhio umano li vede e reagisce, chiudendosi come per la luce comune. Guardarli è pericoloso come guardare il sole, basta fare un po’ attenzione, non puntarli mai negli occhi e abbassare la corrente, quando si guarda il puntino per mettere a fuoco la lente.
Con i laser verdi e blu e viola si devono usare maggiori precauzioni. E potrebbe essere una buona idea usare sempre gli appositi occhiali.
 – MA ATTENZIONE –
– MA ATTENZIONE –
I laser infrarossi (circa 800 nm), sono pericolosissimi!!! Non comprateli!!! La luce infrarossa è invisibile, per cui le normali reazioni di difesa dell’occhio non funzionano. C’è veramente il pericolo di causare gravi danni alla vista.
Lavorazioni possibili
Una fresa CNC equipaggiata con diodo laser viola da 500 o 700 mW, può anche tagliare alcuni materiali (legno sottile, balsa, plastica sottile, carta…) ma per tagliare davvero ci vorrebbero decine di Watt. Le lavorazioni più adatte a questi piccoli laser sono le incisioni nel legno. Con le applicazioni Theremino ImgToGcode e Theremino CNC si possono anche trasformare le fotografie in GCode e fare splendide incisioni.

Questa immagine è solo un esempio (trovato in rete), di quel che si può fare. Ma le possibilità sono davvero infinite!
Per le immagini (o fotografie) la punta deve fare una scansione a righe parallele e ci vuole molto tempo, a volte anche delle ore. Ma fortunatamente incidere scritte e piccoli disegni è una operazione velocissima.

Con un laser da qualche centinaio di milli-watt, si scrivono brevi frasi in poche decine di secondi.
Il Laser Driver


L’adattatore “LaserDriver” può pilotare diodi laser da 100 mW fino a 1 Watt. La massima corrente si imposta con un resistore e potrebbe anche essere maggiore di 1 Ampere. Quindi se in futuro diventassero reperibili diodi laser più potenti, si potrebbe arrivare anche a 3 Watt e oltre (di potenza luminosa!).
Collegando l’adattatore a un Pin di tipo PWM si può regolare la corrente da zero al massimo. Abbassare la corrente serve per incidere con minore energia, ma anche per poter guardare il puntino mentre si regola la lente.
Con questo adattatore la applicazione Theremino CNC può spegnere e accendere il laser e regolare la sua potenza in pochi millisecondi. Si possono quindi scrivere dei GCode per incidere disegni e scritte nel legno. E si possono anche tagliare alcuni materiali (solo materiali sottili e niente metalli).
Evitare di friggere il diodo laser
I diodi laser sono delicatissimi e sensibili alle cariche statiche. Vanno collegati stabilmente al diodo D1 e al condensatore C2, che li proteggono. E vanno collegati PRIMA DI DARE TENSIONE. Se li si scollega anche solo per un attimo, appena li si ricollega si bruciano in un microsecondo e sono da buttare. Questo accade perché scollegando il laser, la tensione su C2 sale fino a cinque volt e oltre. Poi, appena lo si ricollega, il C3 gli scarica sopra la sua tensione, supera la corrente sopportabile e lo brucia all’istante.
Quindi, PRIMA DI COLLEGARE IL LASER, spegnere l’alimentatore e scollegare la USB. Poi attendere almeno un minuto che C2 si scarichi. O meglio ancora, mettere in corto le due uscite Laser+ e Laser- per scaricare C2.
Si deve anche fare molta attenzione ai collegamenti dei due fili che vanno al laser. Basta un falso contatto ad alimentatore acceso (un attimo di tocca non tocca) e il diodo laser è fritto.
Potrebbe essere una buona idea, non montare D1 e C2 sullo stampato del Laser Driver, ma montarli stabilmente, lungo i due fili che vanno al laser. In questo modo il diodo avrebbe i componenti di protezione, saldati ai suoi stessi fili e il rischio di fare errori, si ridurrebbe di molto.
Impostare una corrente massima adeguata
La corrente massima si imposta con R4 che si calcola approssimativamente con la seguente formula:
Resistenza (ohm) = 1600 / Corrente (mA)
Conviene sempre provare, con un tester al posto del laser, se la corrente massima è giusta. Ricordarsi SEMPRE di spegnere tutto e scaricare C2, prima di ricollegare il laser. Si sbaglia una sola volta e il laser è fritto.
Se si vuole raffinare la corrente massima si collega un resistore del valore standard, appena superiore al necessario. E gli si salda in parallelo, un resistore di valore più alto (solitamente dai 100 ai 1000 ohm), fino a raggiungere la giusta corrente. Il resistore in parallelo, essendo di alta resistenza, dissipa poco e quindi può essere un normale resistore da 1/4 di Watt.
Temperatura di T2 e di R4
Per tenere freddo T2, si usa un dissipatore di alluminio, per R4 si usa un resistore di potenza adeguata. Nessuno dei due deve arrivare a scottare le dita. Se scaldano troppo, si aumenta l’area del dissipatore e si cambia R4, con un resistore di maggiore potenza.
Con i laser rossi, fino a 200 mA, e con alimentatore da 5 Volt, il calore da dissipare è minimo. Il transistor resta quasi freddo e per R4 può bastare un resistore da 1 Watt.
Quando si lavora con molta corrente, potrebbe essere una buona idea, non montare R4 sul circuito stampato, ma usare una resistenza rettangolare, collegata con due fili e fissata a qualche parte metallica della macchina.
Tensione di alimentazione
Per far scaldare meno il transistor, non si deve esagerare con la tensione “Laser Supply”. La tensione giusta è la massima tensione richiesta dal laser più due Volt. Quindi per i laser rossi, si userà sempre un cinque Volt e per quelli viola, otto o nove Volt.
Con 12 Volt, il transistor scalda molto di più e si aumenta il rischio di bruciare il laser. Ricordarsi sempre che al minimo errore il laser è defunto. Con la giusta tensione di alimentazione potrebbe anche tollerare errori di qualche secondo, ma con 12 Volt frigge in un micro-secondo!
Download del progetto completo, con PCB Eagle, immagini in 3D e simulazione LTSpice:
Adapter_LaserDriver
Adattatore per pilotare laser commerciali
Esistono laser commerciali applicabili a una fresa. Nella prossima immagine si vede un esempio di laser blu acquistabile su eBay. I laser blu (450 nm) sono economici, ma incidono meno di quelli viola (405 nm), perché non si riesce a metterli a fuoco altrettanto bene.
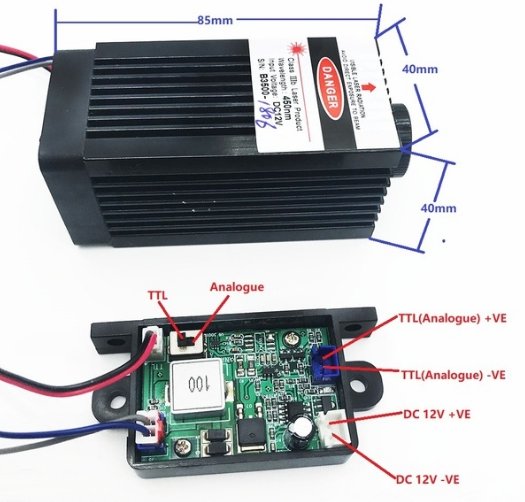
Tutti i laser commerciali hanno un alimentatore simile a questo. In genere l’accensione del laser può essere controllata dall’esterno con una tensione di 5 volt (0 volt = spento e 5 volt = acceso). La corrente richiesta da questo ingresso è minima per cui le uscite del Master possono facilmente fornirla. Però il segnale delle uscite del Master va da zero a 3.3 volt, tensione che in alcuni casi potrebbe non bastare.
Con il circuito seguente si ottiene di traslare in alto la tensione di circa 0.6 .. 0.7 volt (tensione di caduta dei diodi al silicio), e quindi si ottiene una tensione di pilotaggio da circa 0.6 volt (spento) a circa 4 volt (acceso). Questi livelli di tensione dovrebbero soddisfare tutti i tipi di ingressi, sia che si tratti di TTL, che di CMOS, che di Schmitt Triggers.
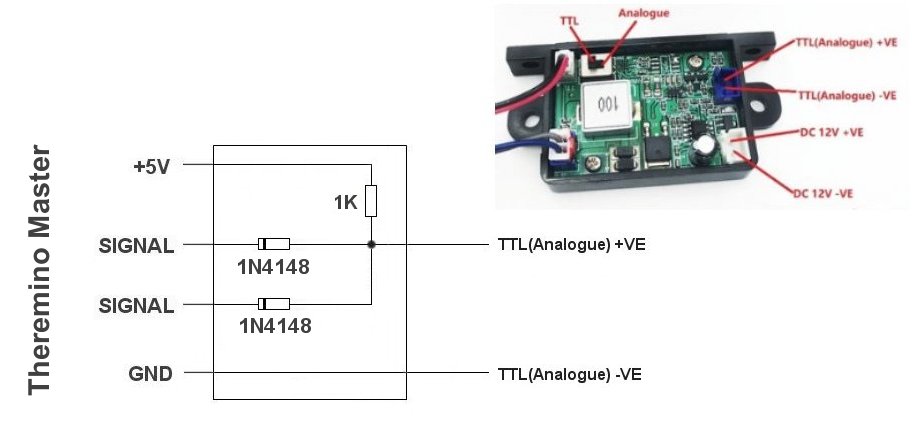
I due ingressi di segnale formano un circuito OR, quindi per accendere il Laser è necessaria la presenza di ambedue i segnali alti (o più precisamente la assenza di segnali bassi). Si possono quindi utilizzare varie combinazioni di segnali di uscita dal Master, nonché aggiungere dei pulsanti per accendere il Laser manualmente, ad esempio per la messa a fuoco.
I segnali più adatti (pagina 42 delle istruzioni della applicazione CNC), sono probabilmente i seguenti:
- Slot 11 – Segnale acceso nelle fasi di lavoro.
- Slot 12 – Segnale regolabile con il comando S (SPEED) del GCode (proporzionale se si configura il Pin di uscita come Pwm o FastPwm)
- Slot 13 – Segnale guidato dei comandi GCode M03 e M13 (ON) e da M05 (OFF)
- Slot 14 – Segnale guidato dei comandi GCode M04 e M14 (ON) e da M05 (OFF)
- Slot 23 – Abilitazione generale della macchina. Dipende da M84 e dal pulsante “IN OUT enable”
- Slot 24 – Abilitazione accessori – ON con START e OFF con STOP
Utilizzando i segnali degli Slot 11 e 12 si può ottenere di accendere il laser durante le fasi di lavoro, e nel contempo regolarlo in intensità con il comando di SPEED (comando S nel GCode). Lo Slot 11 dovrà essere abbinato a un Pin del Master configurato come DigOut. Invece lo Slot 12 dovrà essere essere abbinato a un Pin del Master configurato come Pwm o FastPwm.
Volendo regolare manualmente l’intensità (ad esempio per metter a fuoco), si potrebbe aggiungere un interruttore (o un pulsante normalmente chiuso), in serie al segnale dello Slot 11. Poi si regolerà manualmente la casella Speed, sulla applicazione CNC, per ottenere una bassa luminosità e regolare agevolmente la lente del Laser.
Sono possibili anche altre combinazioni di segnali, eventualmente anche aggiungendo altri diodi. Bisogna però tenere presente che questo è un circuito OR. Quindi per accendere il laser tutti i segnali devono essere alti. Ma è meglio pensare che tutti i segnali devono NON essere a livello basso. Da qui deriva che un segnale aperto (con un interruttore) viene considerato NON basso e quindi permette la accensione del Laser.
Laser audio
 Questo progetto utilizza un raggio Laser per trasmettere un segnale audio (voce o musica), a grande distanza.
Questo progetto utilizza un raggio Laser per trasmettere un segnale audio (voce o musica), a grande distanza.
Si possono facilmente coprire distanze di decine o centinaia di metri. Anche molti chilometri utilizzando ottiche adeguate e mantenendo ben fermo il trasmettitore. E con grandi lenti di Fresnel si potrebbe arrivare anche molto più lontano.
Esistono numerosi progetti in rete per trasmettere segnali audio con un Laser, ma sono tutti messi insieme da ragazzini che hanno fatto due o tre prove e si accontentano che si senta qualcosa. Questo sistema invece è progettato con attenzione per ottenere la massima qualità, il minimo costo e una buona semplicità costruttiva.
Caratteristiche:
- Qualità dell’audio eccezionale, il segnale ricevuto è indistinguibile da quello originale.
- Banda passante perfettamente piatta (entro 0.1 dB da 10 Hz a 50 KHz).
- Distorsione inferiore allo 0.1% (se non si esagera con il segnale di ingresso).
- Rumore di fondo inferiore a -60 dB (con alimentatori adeguati).
- Costruzione semplice, una quindicina di componenti in tutto tra trasmettitore e ricevitore.
- Solo componenti comuni e poco costosi.
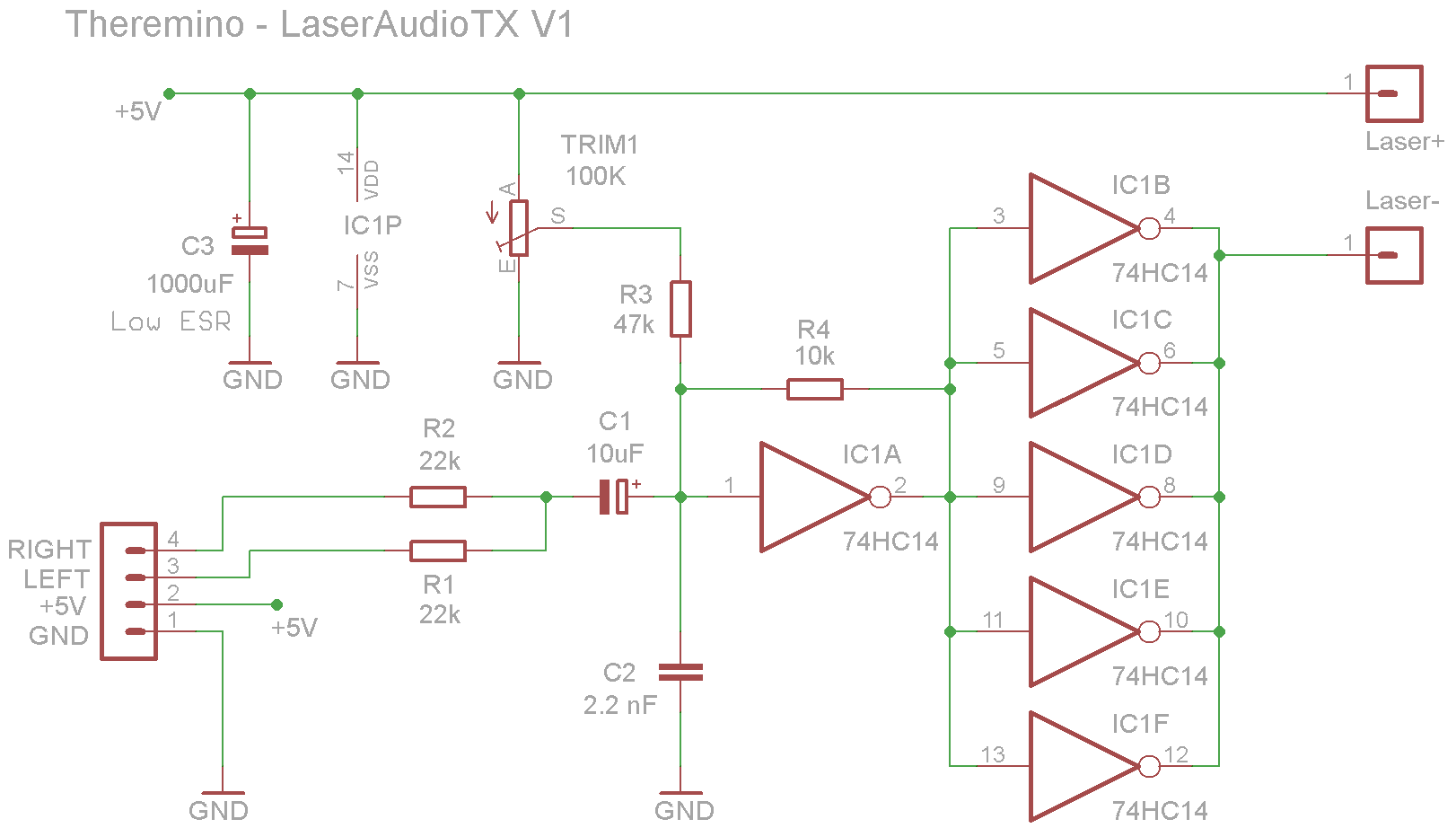
SCHEMA DEL TRASMETTITORE
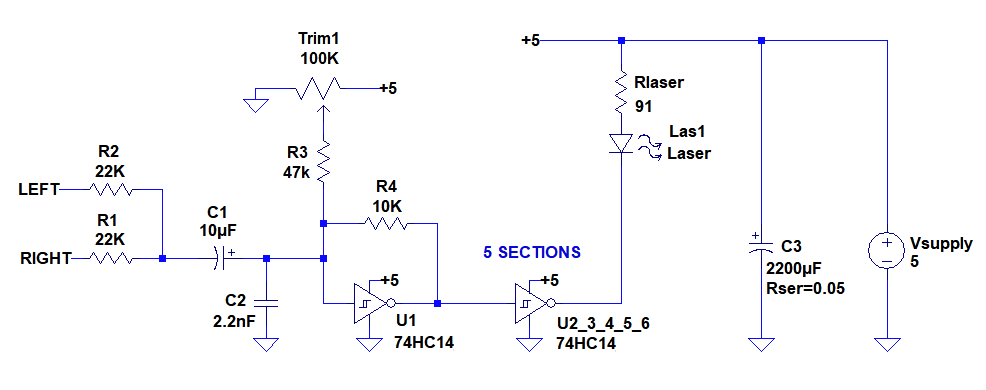
Agli ingressi LEFT e RIGHT si collegano i segnali audio sinistro e destro provenienti in genere da un PC. Con questo collegamento i due canali vengono miscelati e il segnale finale non sarà più stereo ma mono.
Volendo trasmettere separatamente i due canali dello stereo, dovremmo utilizzare due trasmettitori e due ricevitori. In questo caso uniremmo insieme i punti LEFT e RIGHT di ogni trasmettitore, in modo da utilizzare tutti e due i resistori e avere la giusta sensibilità dell’ingresso. Poi a uno dei trasmettitori manderemo il segnale sinistro e all’altro il segnale destro.
Il segnale audio prosegue attraverso C1 fino all’integrato 74HC14, che è il solo componente attivo. La prima sezione U1 oscilla a circa 50-60 KHz (dati dai valori di C2 e R4) e si ottiene un onda quadra con il duty-cycle proporzionale al segnale audio in arrivo.
Il resistore R3 e il trimmer Trim1 servono per centrare il punto di lavoro e ottenere la minima distorsione. Si può regolarlo a orecchio oppure inviando un segnale sinusoidale da 100 Hz con la nostra applicazione DAA. Poi si invia il segnale ricevuto all’ingresso della scheda audio e lo si visualizza sempre con il DAA. Infine si alza il livello di uscita (utilizzando anche i controlli di Windows) fino a ottenere un po’ di distorsione e si regola Trim1 in modo che le semi-onde superiore e inferiore della sinusoide vengano tosate in modo simmetrico e bilanciato.
Infine le sezioni U2, 3, 4, 5, 6 del 74HC14 pilotano con corrente adeguata il Laser, che assorbe circa 30 mA a 5 Volt.
Importante notare che questo circuito DEVE essere alimentato con 5 Volt stabili e a basso rumore. La tensione di 5 Volt proveniente dalla USB va bene, ma si deve fare un buon cablaggio delle masse per evitare di raccogliere rumori e fischi. Se si utilizza un alimentatore esterno al posto della USB, allora deve essere un alimentatore ben stabilizzato (non gli alimentatori che si usano per ricaricare i telefoni), e il suo negativo dovrebbe anche essere messo a terra e collegato alla massa del PC.
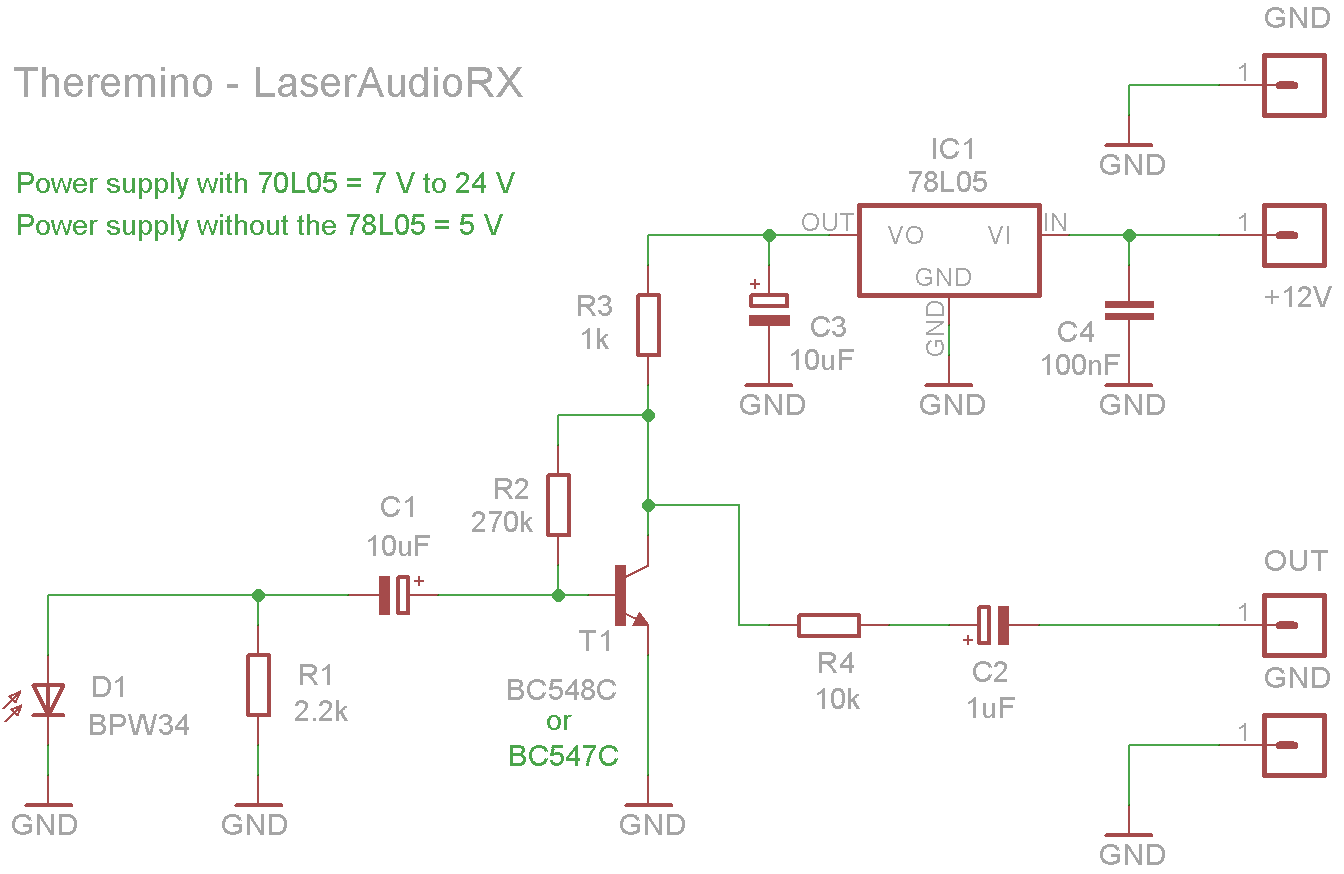
SCHEMA DEL RICEVITORE
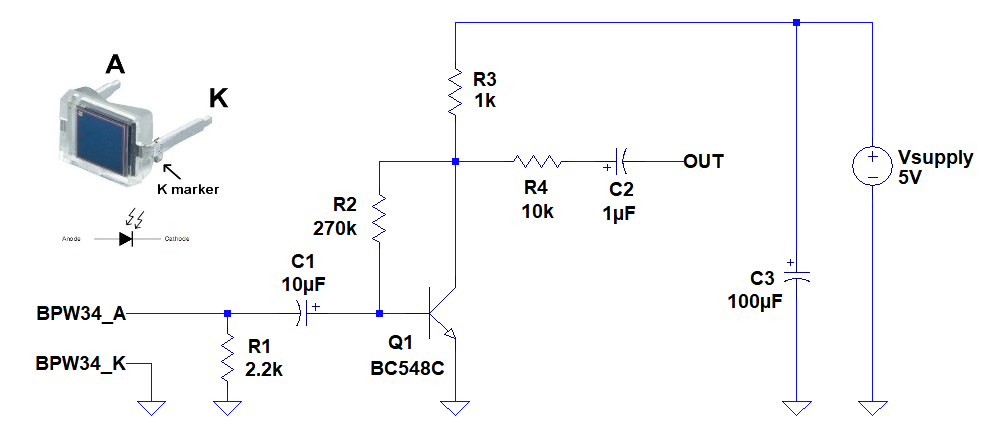
La corrente proveniente dal fotodiodo BPW34 produce una tensione variabile sul resistore R1 (un’onda quadra modulata in PWM). Il transistor Q1 amplifica questo segnale e lo limita oltre un certo livello, stabilizzando quindi il volume ricevuto entro certi margini.
Si ottiene quindi che, se la luce del Laser è sufficiente forte, il livello del segnale audio di uscita resta costante anche per grandi variazioni della messa a fuoco del laser o della distanza tra trasmettitore e ricevitore. Quando invece la luce ricevuta dal Laser si abbassa oltre un certo livello il segnale audio si abbassa progressivamente, ma mantiene comunque una buona qualità (a parte il rumore che aumenta progressivamente in rapporto al segnale che diminuisce).
Il resistore R4, insieme alla capacità del cavo schermato di uscita, sommata alla capacità di ingresso dell’amplificatore (centinaia di picoFarad in totale), forma un passa basso che elimina gran parte della frequenza di commutazione.
Il condensatore C2 elimina la componente continua e quindi il segnale OUT può essere collegato a qualunque ingresso di linea o microfonico, sia di una scheda audio per PC, sia di un normale amplificatore audio HiFi o per strumenti musicali.
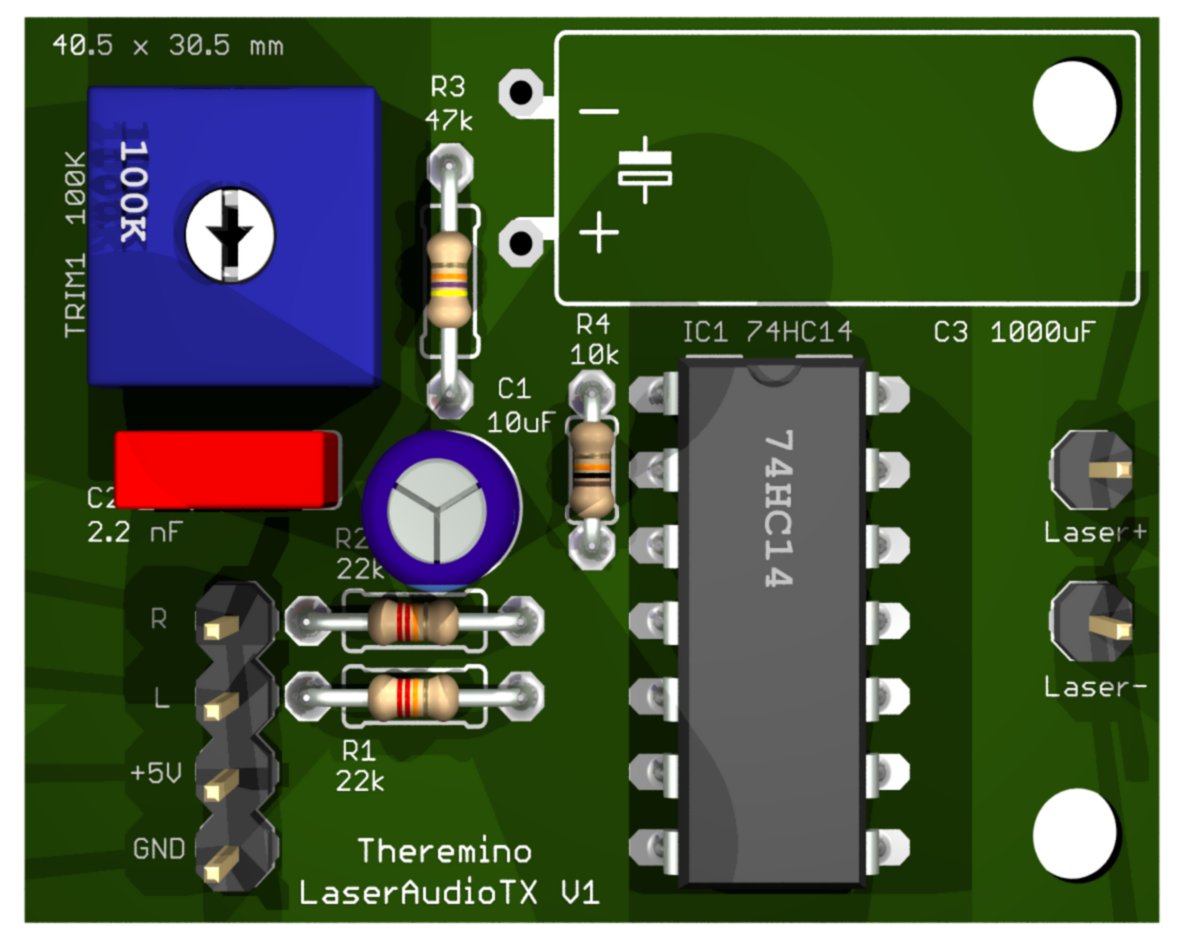
CIRCUITI STAMPATI E KIT
Ringraziamo il produttore e venditore di eBay MaxTheremino, che ha prontamente preparato i circuiti stampati e i kit per questo progetto. Seguite il link di MaxTheremino su eBay e se non li avesse ancora in catalogo scrivetegli per farveli spedire.
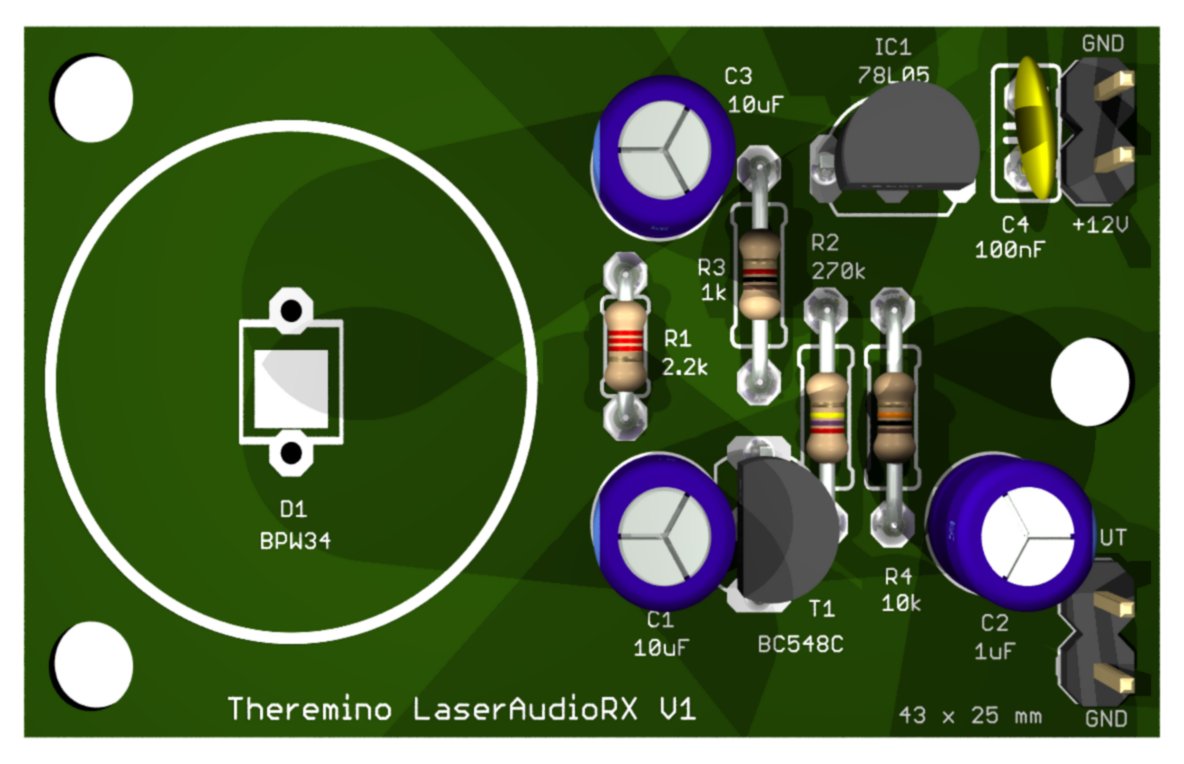
Nella immagine del ricevitore si vede un cerchio bianco, il fascio del Laser va sfocato (ruotando la sua parte anteriore) in modo che alla distanza di lavoro sia più o meno grande come questo cerchio. In questo modo il puntamento diventa meno critico.
Se la distanza tra trasmettitore e ricevitore è molto grande allora, anche con la migliore messa a fuoco, il raggio sarà più grande del cerchio bianco. In questi casi si potrebbe aggiungere una lente per concentrare la luce sul sensore. La lente dovrà essere sempre più grande man mano che la distanza aumenta.
La luce proveniente da lampade, televisori o monitor potrebbe disturbare il segnale, in questo caso si consiglia di utilizzare un tubo nero lungo alcuni centimetri, che potrebbe eliminarla in gran parte.
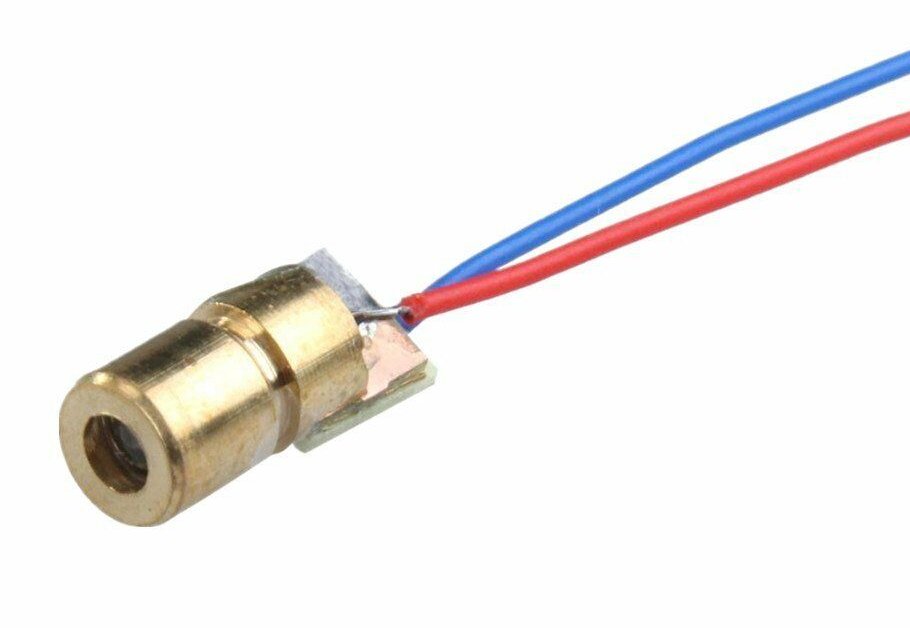
IL LASER
Il Laser deve essere del modello che si vede nelle prossime immagini e deve essere da 5 Volt.
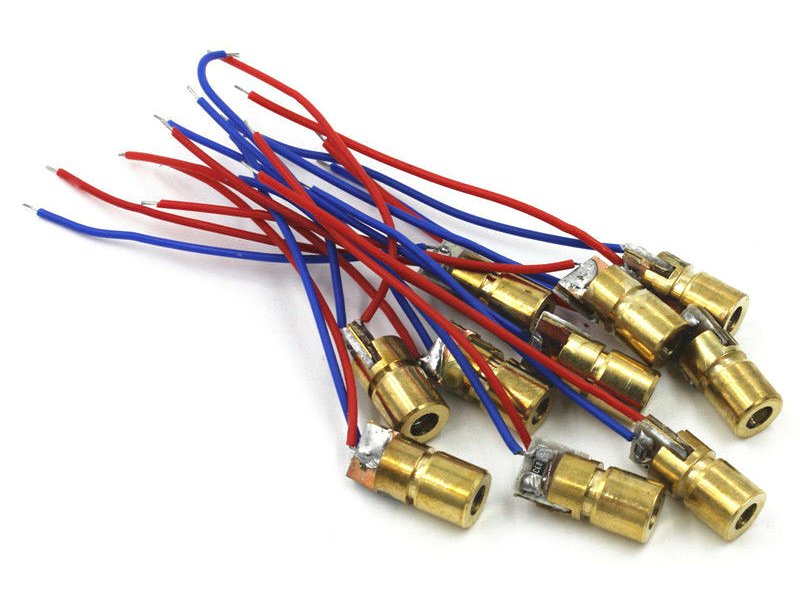
Non comprate laser diversi da questi
Questi modelli di Laser non hanno un circuito complesso di pilotaggio ma solo un resistore. Ed è per questo che possiamo accenderli e spegnerli velocemente.
I Laser da 5 Volt hanno un resistore da 91 ohm (marcato 910), mentre i laser da 3 Volt hanno un resistore da 33 ohm (marcato 330). Quelli da 3 Volt non vanno bene per il nostro progetto.
Dato che questi Laser costano poco (su eBay se ne comprano dieci per un Euro, spedizione compresa) si consiglia di comprarne almeno dieci. In questo modo si possono fare le prove, senza preoccuparsi troppo nel caso ce ne fosse uno difettoso o se ne bruciasse qualcuno per sbaglio.
Maneggiando e saldando i diodi Laser usate sempre gli accorgimenti necessari per evitare l’elettricità statica. Quindi il saldatore deve essere messo a terra e prima di lavorare toccate voi stessi qualcosa che è a terra.
E fate anche attenzione quando collegate i Laser a una sorgente di tensione, perché può bastare un falso contatto, o un breve cortocircuito, per provocare extratensioni in grado di bruciarlo in un microsecondo. Quando il Laser si danneggia continua a fare luce, ma molto debole. In questo caso non si potrà fare nulla per recuperarlo.
Chi sa saldare bene potrebbe eliminare i due fili rosso e blu originali, che si rompono solo a guardarli, e sostituirli con fili di buona qualità, con un gran numero di refoli interni e quindi morbidi, e meglio ancora se con il rivestimento in silicone.
AUTOCOSTRUZIONE
Per chi preferisse costruire i circuiti stampati e comprare da solo i componenti, ecco i progetti completi in formato Eagle. Nel file compresso troverete anche le immagini, gli schemi elettrici, le simulazioni in formato LTSpice e altre informazioni utili.
Nella cartella “Audio Limiter” troverete anche informazioni sul modulo SSM2167 che è reperibile su eBay e che potrebbe essere utile a chi volesse pilotare il trasmettitore con un semplice microfono (se si utilizza un PC o un player MP3 allora questo modulo non serve). Fate attenzione che il modulo che si compra su eBay ha i resistori R1 e R2 scambiati, quindi comprime male. Controllate la immagine 3 e confrontate i valori del PCB con quelli indicati anche nel datasheet. E infine, quando sarete convinti, scambiate R1 con R2.
Download dei file del progetto Laser Audio
Circuiti stampati in formato Eagle, immagini, simulazioni LTSpice e schemi:
Adapter_LaserAudio.zip
Doppler Sensor
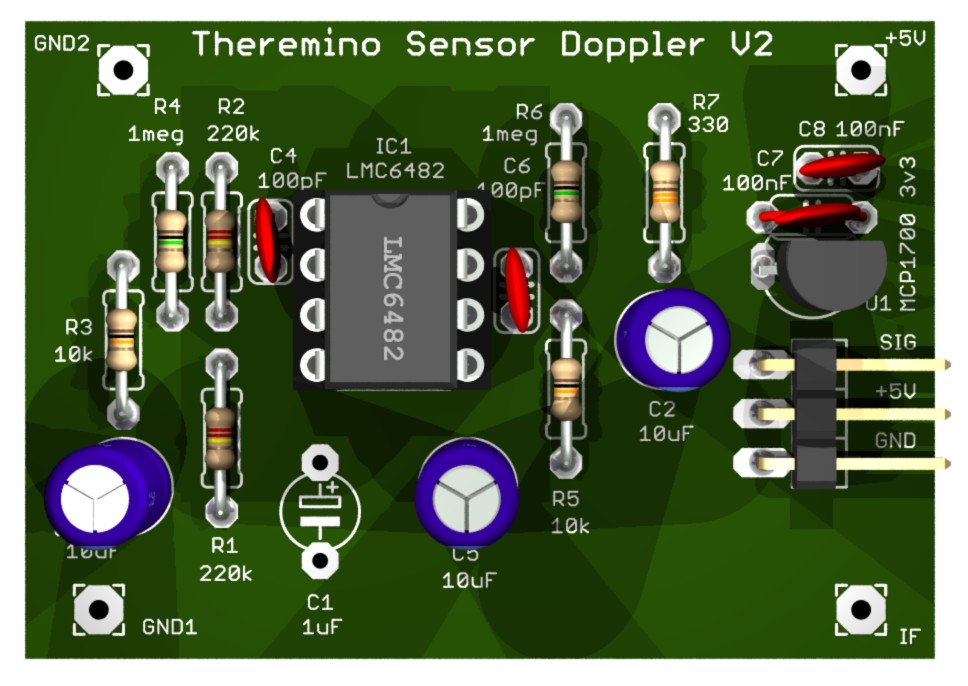
Questo adattatore si applica sul retro dei moduli doppler a microonde HB100. I moduli HB100 si trovano su eBay per meno di 6 Euro, spediti da Europa in pochi giorni, e con spedizione gratuita. Per le caratteristiche e le dimensioni leggere questo Datasheet e questo Application-Notes.
Il nostro adattatore amplifica il segnale di ben 80 dB (diecimila volte) e permette di misurare la velocità di oggetti distanti, fino a qualche decina di metri. Abbinandolo alla applicazione Theremino DopplerMeter si fanno misure di velocità molto precise.
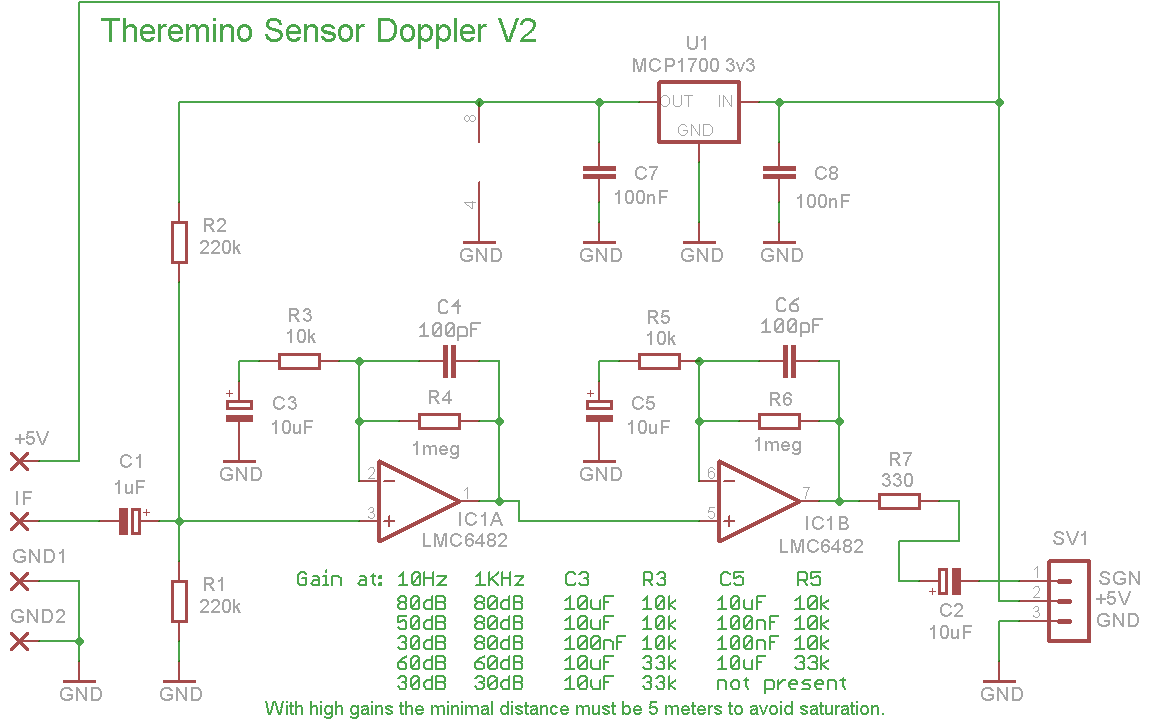
Predisposizione del guadagno
Questo sensore può essere utilizzato per molti usi: dagli antifurti, alla rivelazione di presenza di persone o animali, per accendere le luci, aprire porte e scattare fotografie. Oppure si può misurare la velocità di uccelli, droni, aeromodelli e automobili. Ma anche la velocità di caduta e il diametro delle gocce di pioggia e della grandine, o la densità dei fiocchi di neve.
Alcune di queste applicazioni lavorano con oggetti piccoli a grande distanza, altre con oggetti grandi e vicini. Inoltre il sensore fornisce segnali più forti per oggetti che si muovono lentamente, che per quelli veloci. Non è quindi possibile ottimizzare il pre-amplificatore per tutti gli usi.
Una prima approssimazione potrebbe essere di regolare il guadagno abbastanza basso, cioè a trenta decibel per tutte le frequenze (vedere le note nello schema elettrico).
 Poi si potrebbe alzare il guadagno cercando la combinazione di componenti più adatta agli oggetti da misurare. In pratica si deve ottenere un buon segnale, sia per gli oggetti lenti che per quelli veloci, ma senza arrivare alla saturazione.
Poi si potrebbe alzare il guadagno cercando la combinazione di componenti più adatta agli oggetti da misurare. In pratica si deve ottenere un buon segnale, sia per gli oggetti lenti che per quelli veloci, ma senza arrivare alla saturazione.
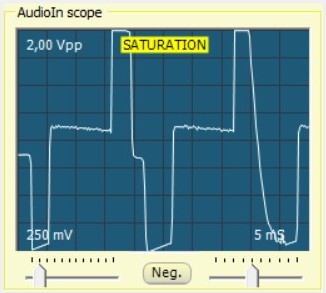
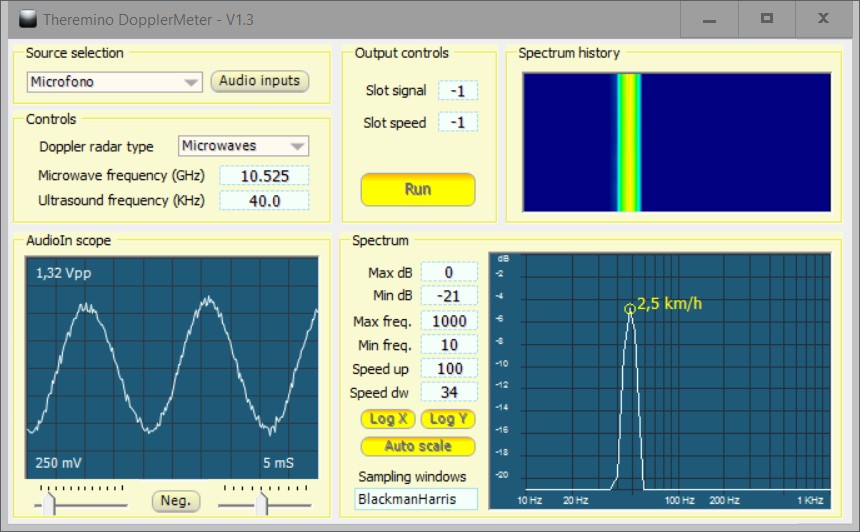
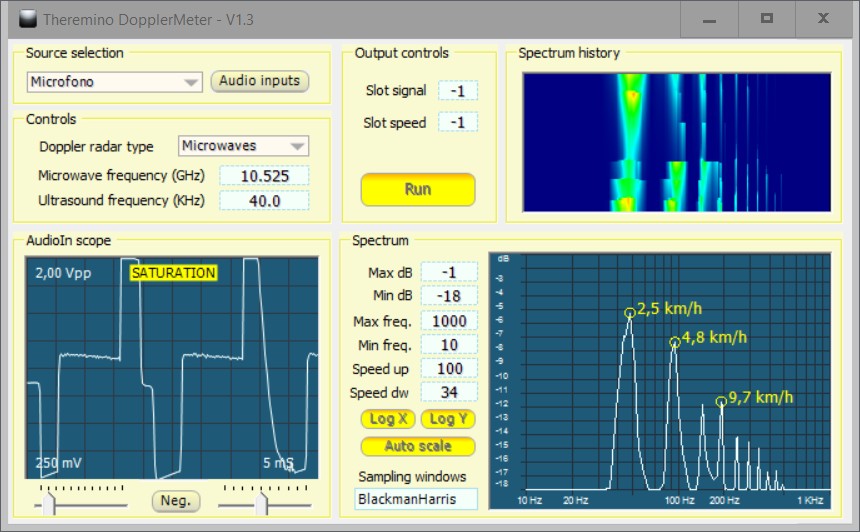
Nel funzionamento normale si dovrebbe stare sotto al Volt picco-picco, in modo da avere un buon margine prima della saturazione, che avviene a due Volt picco-picco. La saturazione è segnalata da un messaggio nella parte alta dell’oscilloscopio.
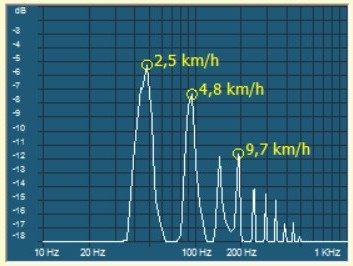 Se si lavora nella zona di saturazione appaiono molte righe a velocità multiple di quelle reali e questo confonde le misurazioni.
Se si lavora nella zona di saturazione appaiono molte righe a velocità multiple di quelle reali e questo confonde le misurazioni.
Il guadagno massimo (80 decibel a tutte le frequenze) è adatto per antifurti e rivelatori di presenza, che non misurano la velocità e quindi possono anche saturare. Questa regolazione satura molto facilmente ed è adatta solo per misurare le velocità di oggetti piccoli e lontani.
Il guadagno minimo (30 decibel a tutte le frequenze) può misurare la velocità di oggetti abbastanza vicini senza saturare, ma potrebbe avere una sensibilità insufficiente per oggetti piccoli e lontani.
Le regolazioni con guadagno maggiore alle alte frequenze (alte velocità), sono adatte per misurare la velocità di oggetti veloci, senza saturare facilmente con gli oggetti lenti.
L’oscilloscopio e l’indicatore di saturazione aiutano a scegliere la migliore regolazione del guadagno per la propria applicazione.
I componenti che stabiliscono il guadagno
Modificando due resistori e due condensatori (C3, R3, C5, R5), si ottengono tutte le combinazioni possibili di guadagno e le variazioni di guadagno per le velocità basse e alte. Vedere le note nello schema elettrico.
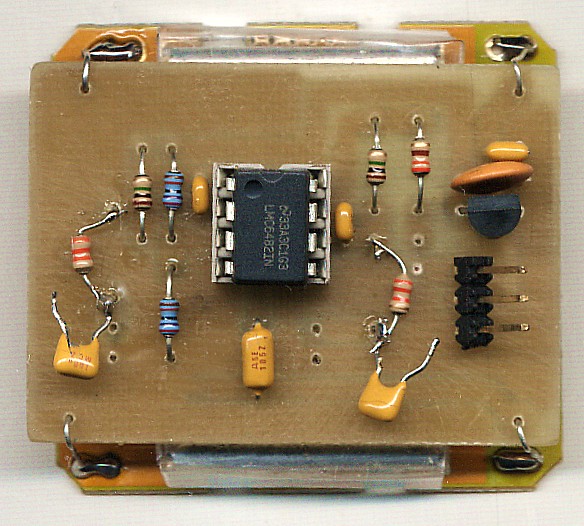
Durante le prove è bene saldare i resistori e i condensatori a quattro fili che spuntano dai fori, per poterli sostituire ripetutamente, senza rovinare il circuito stampato.
In questa immagine si vedono due resistori da 33k e due condensatori da 10 uF. I condensatori non si vedono perché non sono elettrolitici a barilotto, ma piccoli SMD saldati sul lato inferiore.
I due condensatori gialli da 100 nF sono solo saldati da un lato e pronti per provarli, ma attualmente non collegati.
Una volta stabiliti i valori di componenti più adatti, si dissaldano i fili di prova e si saldano i componenti definitivi nei fori dello stampato. Gli stessi valori andranno bene per tutte le applicazioni simili.
Costruzione meccanica
I moduli radar HB100 si trovano su eBay per meno di 6 Euro, spediti da Europa in pochi giorni, e con spedizione Gratuita. Per le caratteristiche e le dimensioni dei moduli HB100 leggere questo Datasheet e questo Application-Notes.
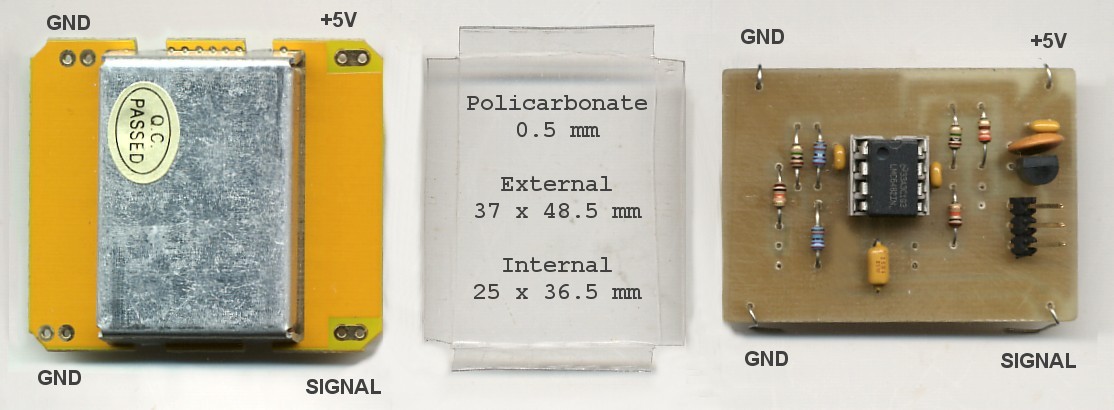
Come si vede in questa immagine, si deve tagliare un pezzo di plastica trasparente, con quattro ali laterali ripiegate verso il basso. Poi si posiziona la plastica sul rettangolo di alluminio per isolarlo. E infine si saldano i quattro fili del pre-amplificatore, ai quattro lati del sensore, attenzione a non collegarli al contrario.
Collegamento al PC
I tre fili di uscita (Gnd / +5V / Signal), vanno collegati a una scheda audio USB, modificata per fornire la alimentazione a 5 Volt. Il collegamento USB non può essere molto lungo (massimo 5 metri) quindi la scheda audio deve per forza stare vicina al PC. Invece il cavo che va dal sensore alla scheda audio può essere lungo a piacere, anche centinaia di metri.
Se il cavo è corto (meno di un metro), allora si può usare un cavo a tre fili non schermato. Invece per collegamenti lunghi è bene usare un buon cavo schermato, possibilmente cavo microfonico abbastanza grande e con la cordina antistrappo. Il cavo schermato dovrebbe avere due fili interni, solitamente uno bianco (per il segnale), e uno rosso (per la tensione di alimentazione).
La scheda audio modificata
La modifica è la stessa che si fa per il PMT Adapter, ma il limitatore deve poter dare più corrente, quindi si usano i componenti da 150 mA (R1 = 4.7k / R2 = 22k / R3 = R4 = 1 mega) e non quelli da 80 mA che si usano normalmente per i PMT Adapter.
Qui c’è il progetto del limitatore di corrente per la scheda audio:
https://www.theremino.com/hardware/adapters#limitersmd
E in questi file (a pagina 24) è spiegato come modificare la scheda audio:
![]() PmtAdapters_ITA
PmtAdapters_ITA
![]() PmtAdapters_ENG
PmtAdapters_ENG
![]() PmtAdapters_JAP
PmtAdapters_JAP
Regolazione dell’ingresso audio nel PC
Nella applicazione Theremino Doppler Meter scegliere l’ingresso del microfono USB e controllare, muovendo una mano davanti al sensore, di aver scelto l’ingresso giusto.
- Premere il pulsante “Audio inputs” (deve aprirsi il pannello “Audio” / “Registrazione”)
- Selezionare il microfono giusto (si vede la sua barretta verde muoversi quando si muove la mano)
- Premere “Proprietà”
- Scegliere la linguetta “Livelli” e mettere il regolatore al massimo (valore = 100)
- Scegliere la linguetta “Personalizza” e disabilitare l’opzione “AGC”
Apparecchi di test
Per provare il buon funzionamento di questo sensore si possono usare due semplici apparecchi di prova.
 Qui si vede un diapason da 105 Hz che si usava negli anni 60, per tarare la velocità del motore delle telescriventi olivetti. Con un sensore da 10.525 GHz, questo diapason produce una riga ben definita alla velocità di 6.3 Km/h. Con un diapason a 440 Hz, del tipo per accordare gli strumenti musicali si otterrebbe una riga alla velocità di 22.3 Km/h.
Qui si vede un diapason da 105 Hz che si usava negli anni 60, per tarare la velocità del motore delle telescriventi olivetti. Con un sensore da 10.525 GHz, questo diapason produce una riga ben definita alla velocità di 6.3 Km/h. Con un diapason a 440 Hz, del tipo per accordare gli strumenti musicali si otterrebbe una riga alla velocità di 22.3 Km/h.
 Questo è un piccolo motore elettrico, collegato a due pile stilo e con due alette di nastro adesivo di rame incollate sul perno. Con un sensore da 10.525 GHz, questo motore produce una riga alla velocità di 2.5 Km/h. Si possono ottenere velocità maggiori aumentando la tensione fino a 6 o 12 Volt. Il vantaggio rispetto ai diapason è di avere un segnale continuo, stabile e regolabile in velocità. Per ottenere un segnale sinusoidale e una riga ben netta, è bene rivolgere le punta del perno del motore verso il sensore.
Questo è un piccolo motore elettrico, collegato a due pile stilo e con due alette di nastro adesivo di rame incollate sul perno. Con un sensore da 10.525 GHz, questo motore produce una riga alla velocità di 2.5 Km/h. Si possono ottenere velocità maggiori aumentando la tensione fino a 6 o 12 Volt. Il vantaggio rispetto ai diapason è di avere un segnale continuo, stabile e regolabile in velocità. Per ottenere un segnale sinusoidale e una riga ben netta, è bene rivolgere le punta del perno del motore verso il sensore.
Aumentare la portata
Il sensore nudo ha un fascio abbastanza largo (circa 60 gradi) e riesce ad arrivare al massimo a qualche decina di metri. Per misurare la velocità di oggetti distanti, ad esempio aeromodelli, droni o uccelli, si possono concentrare le microonde in un fascio più stretto e arrivare a qualche centinaio di metri.
I misuratori della polizia hanno una antenna a tromboncino (Horn antenna), lunga una decina di centimetri, con guadagno di circa 17 dB, fascio di circa 30 gradi e un costo di oltre 30 Euro. Vedremo qui di seguito che le parabole per satelliti hanno caratteristiche migliori e costano meno.
La tabella seguente mostra che parabole molto piccole, anche di soli 40 centimetri di diametro, hanno un buon guadagno e un fascio stretto. Con le parabole si ottiene un notevole incremento della distanza massima raggiungibile. Anche oltre i 500 metri con parabole grandi.
| Diametro parabola | Guadagno (10 GHz) |
Angolo di apertura (totale, non semi angolo) |
Diametro del fascio (a 100 mt) |
Prezzo approssimativo + spedizione |
| 20 cm | 25 dB | 17 gradi | 30 metri | |
| 25 cm | 27 dB | 14 gradi | 25 metri | |
| 30 cm | 28 dB | 12 gradi | 21 metri | |
| 35 cm | 30 dB | 10 gradi | 18 metri | |
| 40 cm | 31 dB | 9 gradi | 16 metri | 10 + 8 Euro |
| 45 cm | 32 dB | 8 gradi | 14 metri | 12 + 9 Euro |
| 60 cm | 34 dB | 6 gradi | 10 metri | 14 + 10 Euro |
| 80 cm | 38 dB | 4 gradi | 7 metri | 15 + 10 Euro |
| 100 cm | 39 dB | 3 gradi | 5 metri | 30 + 12 Euro |

Meglio non esagerare con le dimensioni della parabola. Con 40 cm di diametro si ottiene un fascio abbastanza stretto, ma non tanto stretto da rendere difficile il puntamento.
Su eBay si trovano parabole piccole, per circa dieci Euro. Si deve scegliere un modello “offset”, ed è meglio che sia in alluminio, per non arrugginirsi ed essere leggera.
Il sensore si fissa dove è previsto l’illuminatore per i satelliti e il posizionamento non è critico.
Per facilitare il puntamento si può montare un semplice mirino e una maniglia posteriore. Le parabole in alluminio sono leggere e si possono tenere con una mano sola. Con un po’ di allenamento si riesce anche a misurare la velocità degli uccelli in volo.
Distanza massima e velocità massima
- La distanza massima di rilevazione, per oggetti grandi come una persona, è di circa 20 metri.
- Con una parabola da 40 cm si estende la distanza massima fino ad alcune centinaia di metri.
- La banda passante del pre-amplificatore è limitata da 1 Hz a 2 KHz
- Le corrispondenti velocità vanno da 0.05 Km/h a 100 Km/h (da 0.014 m/s a 28 m/s)
- Con un leggero calo di sensibilità si possono misurare velocità fino a 150 Km/h.
Per aumentare la velocità massima misurabile, si possono eliminare i condensatori C4 e C6. Il segnale diventa leggermente più rumoroso, ma la banda passante si estende fino a 20 KHz, che corrispondono a 1000 Km/h.
Misurare la velocità degli eventi atmosferici
Per misurare la velocità di caduta di pioggia, grandine e neve si dovrebbe posizionare il sensore all’aperto, rivolto verso l’alto, in una scatola non metallica e perfettamente stagna. Non è facile ottenere una totale resistenza alle intemperie ma, fortunatamente si possono ottenere buoni risultati con il sensore all’interno di una finestra. Si deve scegliere una finestra non riparata da tettoie e si deve posizionare il sensore vicino al vetro, rivolto a circa 70 gradi verso l’alto.
- Pioggia – Si ottiene uno spettro di distribuzione delle velocità delle gocce. E da esso si può ricavare uno spettro delle dimensioni delle gocce (le gocce piccole cadono più lentamente)
- Grandine – Si ottiene uno spettro di distribuzione delle velocità e quindi delle dimensioni dei chicchi.
- Neve – Dalla velocità media si può ricavare il tipo di neve, cioè se si tratta di neve secca e leggera (che cade lentamente), oppure di neve bagnata (che cade più velocemente).
Per le velocità medie di pioggia, grandine e neve, vedere: Theremino_DopplerMeter
– – – – – –
Download del progetto del Doppler – Versione 2
Circuito stampato in formato Eagle, immagini, simulazioni LTSpice e schemi:
Sensor_Doppler_V2.zip
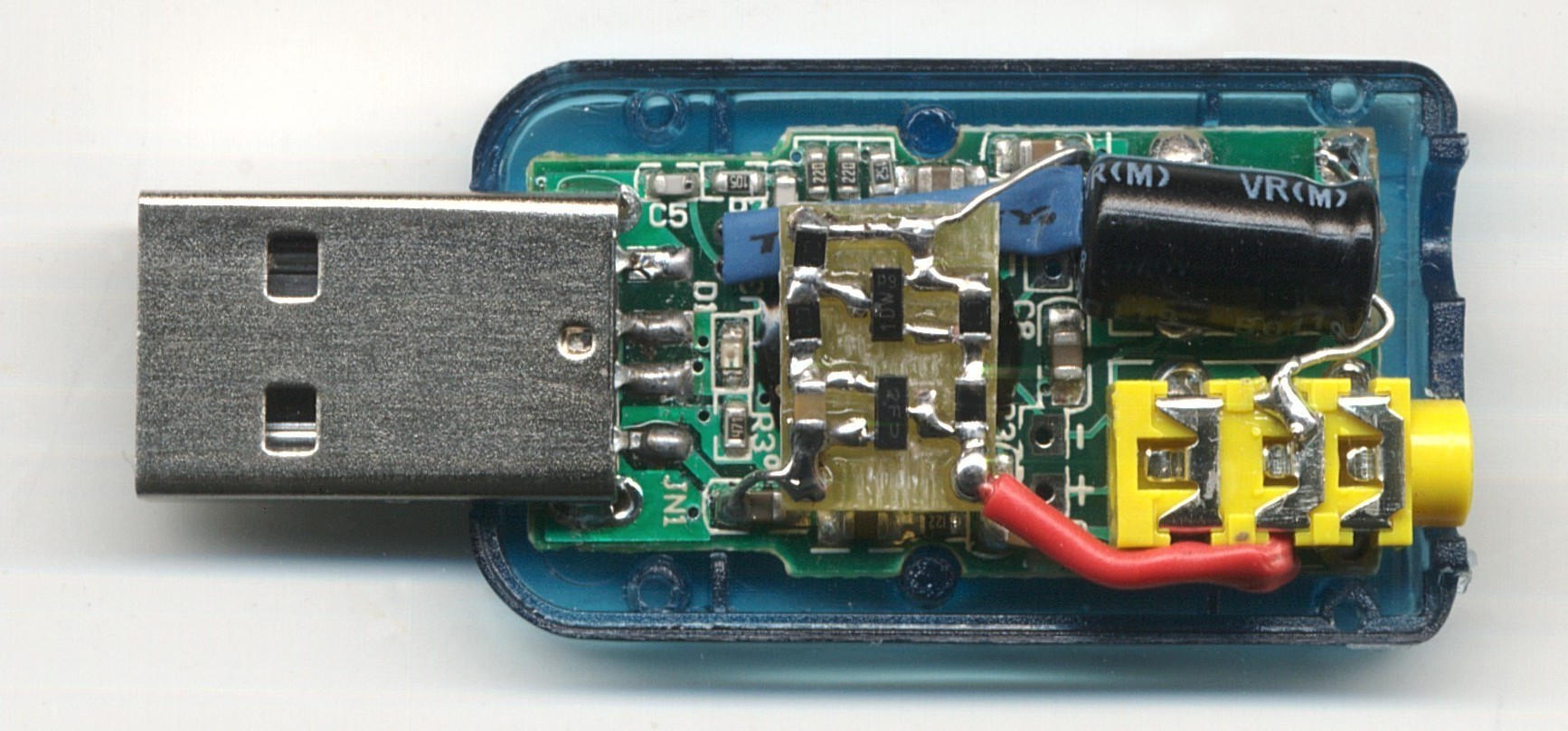
UpConverter per SDR
Tutti i veri makers dovrebbero, almeno una volta, esplorare il magico mondo delle onde corte e lunghe. Quello che fino a pochi anni fa era accessibile solo a radioamatori benestanti, disposti a spendere grandi cifre, ora è accessibile a tutti, con una spesa non superiore a qualche decina di Euro. E si ha anche la soddisfazione di costruire il ricevitore con le proprie mani.
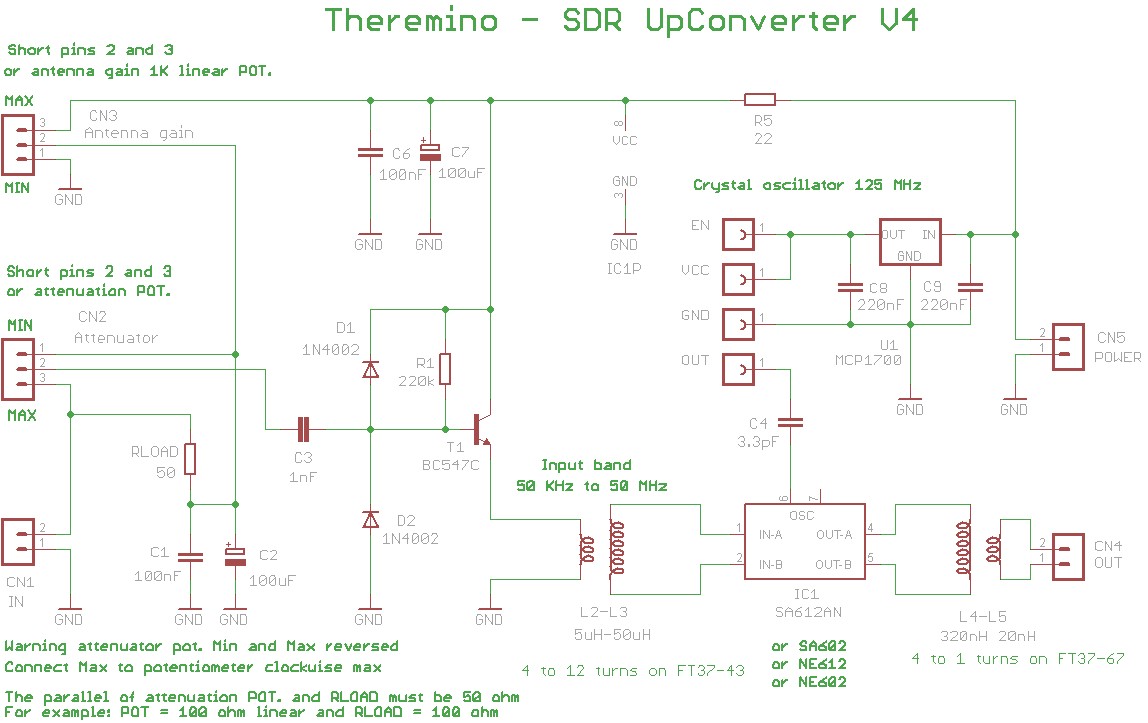
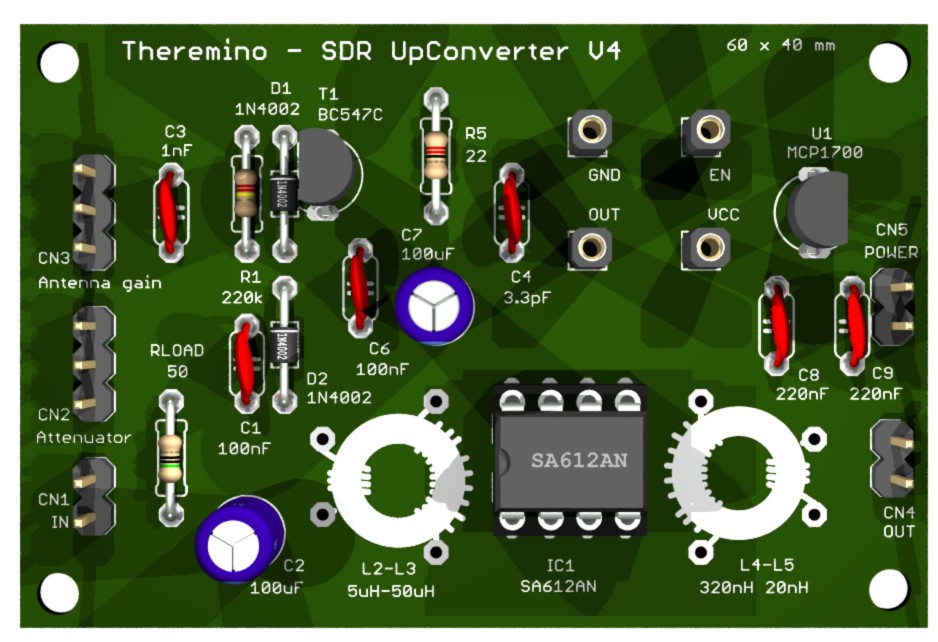
Con questo modulo la applicazione Theremino SDR può ricevere anche le onde lunghe, medie e corte da 10 KHz a 50 MHz. La sensibilità è ottima e nelle giornate migliori si ricevono centinaia di radioamatori da tutto il mondo (Nota 1). Ma anche in assenza di propagazione si ricevono molti QSO locali, nonché i segnali di tempo sulle VLF (onde lunghissime), i radiofari degli aeroporti, le trasmissioni commerciali in onde lunghe e medie, centinaia di trasmissioni meteorologiche, telescriventi e comunicazioni in alfabeto morse e codificate in vari formati digitali.
In questo adattatore si usano solo componenti comuni e sono tutti disposti a passo 2.54 mm. Per cui si può anche utilizzare una basetta mille-fori al posto del circuito stampato.
Progetti correlati: applicazione Theremino SDR, applicazione Theremino SignalDecoder e Theremino ActiveAntenna. Per maggiori informazioni leggere i file di documentazione che si scaricano con la applicazione Theremino SDR.
(Nota 1) Attenzione: Ci vuole per forza la Theremino ActiveAntenna oppure, ma molto più ingombrante, una lunga antenna filare. E l’antenna deve essere posizionata all’esterno della casa, magari su un terrazzo, ma fuori. Con una antenna interna non si riceve niente, solo disturbi provenienti dagli elettrodomestici.
(Nota 2) La alimentazione di questo UpConverter deve essere di 5 volt e la si porta attraverso il connettore “CN5 POWER”. I due fili di alimentazione (GND e 5V) si derivano dalla alimentazione USB del ricevitore SDR. Per poter connettere il ricevitore al PC con un solo cavo USB, consigliamo di utilizzare un cavo di prolunga USB, tagliarlo a metà, spellare i suoi quattro fili e collegarsi ai suoi due fili di alimentazione che solitamente sono nero (GND) e rosso (+5V). Fate attenzione a collegarli giusti e eventualmente misurate il 5 volt con un tester e controllate che il negativo sia collegato a GND prima di collegare la presa CN5 e alimentare l’UpConverter. Se sbagliate si possono bruciare sia l’integrato IC1 che il regolatore U1.
Componenti
Questo progetto comprende alcuni componenti speciali, che non si trovano normalmente nei cassetti del laboratorio.
- Circuito integrato convertitore: Si consiglia di cercarlo su eBay come “NE602”, “NE612” “SA602” o “SA612” (sono tutti uguali). Dovrebbe costare circa cinque euro. Per chi risiede in Europa si consiglia di comprarlo in Germania, così arriva in tre giorni e non si devono attendere 20 o 30 giorni dalla Cina.
- Oscillatore quarzato a 125 MHz: Si consiglia di cercarlo su eBay come “Oscillator 125MHz”. Fare molta attenzione che sia del tipo quadrato e che sia da 3.3 Volt. Anche qui è meglio se lo si trova da un venditore già in Europa.
- Nuclei toroidali in ferrite: Si possono-acquistare-qui, oppure su eBay cercando “FT37-43” e “FT37-67”. Acquistandone 25 pezzi per tipo, li si potrebbero pagare circa 30 centesimi a pezzo. Chi ne volesse di meno, dovrà prenderli su eBay e pagarli circa due Euro al pezzo.
Tutti i componenti per costruire il Theremino UpConverter (e anche molti altri kit) saranno disponibili su thereminostore. Ma potrebbero volerci mesi, perché sono molti i progetti in corso. E per ognuno i cinesi devono imparare i particolari di costruzione e di collaudo, fare i PCB, trovare i produttori dei componenti… Consigliamo quindi di arrangiarsi, oppure di scrivere ad Alessio e vedere se ne ha comprati un po’ per gli amici.
Consigli per la costruzione
Un transistor disaccoppia i filtri di ingresso dal cavo e permette di avere una impedenza di ingresso puramente resistiva e costante, su tutta la gamma di frequenze ricevibili.
Questo schema di terminazione permette anche di fornire la alimentazione alla antenna attiva, attraverso lo stesso resistore di terminazione, semplificando il circuito di alimentazione, eliminando la bobina di iniezione della corrente (che per frequenze molto basse diventa problematica), e eliminando anche il rumore proveniente dall’alimentatore. La alimentazione viene iniettata sul lato “freddo” del resistore di terminazione e non contribuisce al rumore, invece altri schemi, che non usano questo sistema, hanno costanti problemi di rumore, tanto che molti consigliano di usare una pila per alimentare la antenna.
Se non si usa la antenna attiva allora si potrebbe non montare il potenziometro “Antenna Gain”, oppure si potrebbe tenerlo al minimo, per non mandare tensione alla antenna. Ma anche se lo si alza la corrente inviata alla antenna è minima e non comporta nessun problema o rischio.
Se non si usa la antenna attiva, non potendo regolare il guadagno con il potenziometro “Antenna Gain”, si dovrà per forza montare il potenziometro “Attenuator”. Questo potenziometro dovrebbe essere un lineare da 100 ohm e si dovrà anche sostituire RLOAD, con un resistore da 100 ohm. In questo modo il potenziometro e RLOAD in parallelo, formeranno una impedenza di ingresso di 50 ohm e il cavo schermato da 50 ohm sarà terminato correttamente.
Cablaggi del convertitore
Il connettore di antenna è solitamente un BNC, ma stiamo trattando frequenze basse, inferiori ai 50 Mhz, quindi vanno tutti bene.
I collegamenti tra il connettore della antenna e l’ingresso del convertitore e poi dalla uscita al ricevitore SDR, andrebbero fatti con un piccolo cavo schermato da 50 ohm. Si consiglia di tagliare in tre parti il cavetto della antennina, che si riceve con il convertitore, in modo da avere un cavo con il piccolo connettore dorato da un lato, e un altro pezzo di cavo per fare i cablaggi. Tanto poi la antenna la si potrebbe ricollegare con un connettore. La antennina è carina da vedere, ma in pratica non la si userà più, perché un qualunque pezzetto di filo, lungo una spanna, va altrettanto bene.
Nel ricevitore si può anche usare un doppio commutatore per “saltare” il convertitore e togliergli la alimentazione, quando si vogliono ricevere frequenze da 50 MHz in su.
Il potenziometro “Antenna Gain” lavora in continua quindi si può collegarlo con fili non schermati e lunghi a piacere. Invece per i collegamenti al potenziometro “Attenuator” si dovrebbero usare due piccoli cavi schermati, oppure tenere i fili abbastanza corti (cinque centimetri al massimo).
Caratteristiche del convertitore
Lo schema è molto semplice, niente filtri ellittici con decine di poli, che si vedono nei progetti simili, ma provatelo prima di giudicare. Le prime versioni erano più complesse, c’erano trappole e filtri notch, preselettori commutabili e bobine da regolare. Ma abbiamo scoperto che non si guadagnava niente. Quello che invece serve davvero è un perfetto adattamento della impedenza del cavo e il bilanciamento in ingresso e uscita con trasformatori toroidali. Ed è anche importantissimo poter controllare la attenuazione in modo continuo, per ottenere la minima intermodulazione e quindi la massima sensibilità. Progetti simili al nostro, con attenuatori copiati dai libri di scuola, forniscono attenuazioni fisse, a scatto, e lavorano sempre lontani dalle condizioni migliori. E così perdono per strada i segnali più deboli e interessanti.
Confrontando questo convertitore con moduli commerciali apparentemente migliori, si scopre che non solo non va peggio ma, in molte situazioni, va molto meglio. Ne siamo sicuri perché abbiamo provato.
Questa è una dimostrazione che per fare buoni progetti, non basta aggiungere componenti su componenti. Si devono invece fare molti esperimenti e non dare niente per scontato. Ci vuole molta esperienza, ma anche centinaia di ore di prove. L’elettronica analogica sorprende sempre e spesso quello che sembrerebbe essere superiore, super complesso e super preciso, è solo il frutto di una cattiva progettazione.
Comparazione tra lo NE602 e i mixer a diodi
Molti autori sconsigliano lo NE602, per la sua scarsa tolleranza ai segnali forti. Alcuni arrivano addirittura a scrivere che un ricevitore, con questo integrato, diventa automaticamente un giocattolo. Leggete ad esempio questo: Why_NOT_to_use_the_NE602.pdf
Documenti come questo ci hanno fatto perdere mesi di tempo. Abbiamo provato ogni tipo di mixer a diodi, ma puntualmente tutte le prove si concludevano con risultati peggiori dello NE602. Abbiamo provato mixer a diodi considerati molto buoni (ADE-1), mixer auto-costruiti con diodi 1N4148, con diodi shottky e con diodi al germanio, seguendo le regole classiche, ad esempio queste istruzioni e anche queste.
Ma tutti gli up-converter per RTL2832, con mixer a diodi, andavano peggio di quello di riferimento, con NE602. Per cui alla fine ci siamo messi seriamente a fare i conti e abbiamo capito il perché. I calcoli che confermano la superiorità dello NE602 sono a pagina 29 delle istruzioni di Theremino SDR.
– – – – – – – – –
Download del progetto del circuito stampato in formato Eagle, con immagini, simulazioni LTSpice e schemi:
https://www.theremino.com/wp-content/uploads/files/SDR_UpConverter_V4.zip
Antenna Attiva per le onde corte, medie, lunghe e VLF
Questa antenna è lunga pochi centimetri e riceve meglio delle enormi antenne che si vedono sui tetti dei radioamatori. Naturalmente c’è un rovescio della medaglia, può solo ricevere.
Progetti correlati: applicazione Theremino SDR, applicazione Theremino SignalDecoder e adattatore UpConverter. Per maggiori informazioni leggere i file di documentazione che si scaricano con la applicazione Theremino SDR.
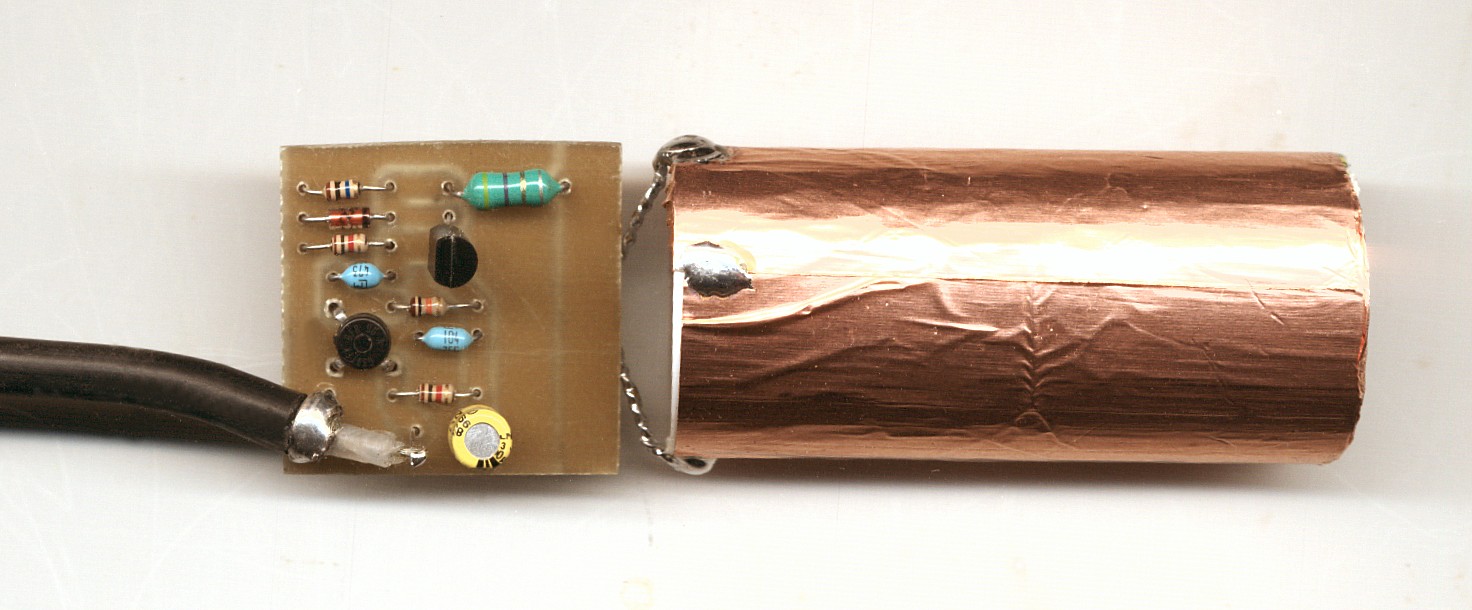
Le classiche antenne filari si accoppiano sia con il campo elettrico che con quello magnetico, sono più efficienti in alcune direzioni e lavorano solo in una ristretta banda di frequenze. Invece questa antenna riceve il solo campo elettrico, riceve da tutte le direzioni con la stessa efficienza e lavora a larga banda da pochi KHz fino a 50 MHz.
Ricevere la componente elettrica, invece di quella magnetica, permette di eliminare i disturbi che provengono dagli impianti elettrici. Il campo elettrico non attraversa i muri delle case per cui il rapporto tra segnale e disturbi è migliore.
Alle frequenze più basse questa antenna è notevolmente migliore di una antenna a filo. Sembra strano, perché di solito più le frequenze sono basse e più la antenna dovrebbe essere grande, ma è proprio così. Il motivo è che le antenna filari devono avere una lunghezza paragonabile alla lunghezza d’onda, che per le frequenze basse è da centinaia di metri a decine di chilometri. Naturalmente non è possibile costruire antenne così lunghe per cui le antenne filari alle frequenze basse funzionano molto male. Invece una antenna attiva è in pratica un condensatore accoppiato con il campo elettrico presente nell’aria. E basta che questo condensatore sia di una trentina di centimetri quadri, per ottenere la massima sensibilità, indipendentemente dalla frequenza, anche a poche decine di KHz, dove le lunghezze d’onda sono di decine di chilometri.
Anche poter ricevere con la massima sensibilità da tutte le direzioni è molto comodo. L’antenna non deve essere ruotata, la si posiziona su un terrazzo o sul tetto, ci si dimentica che esiste e si ricevono i radioamatori da tutto il mondo. Provare per credere.
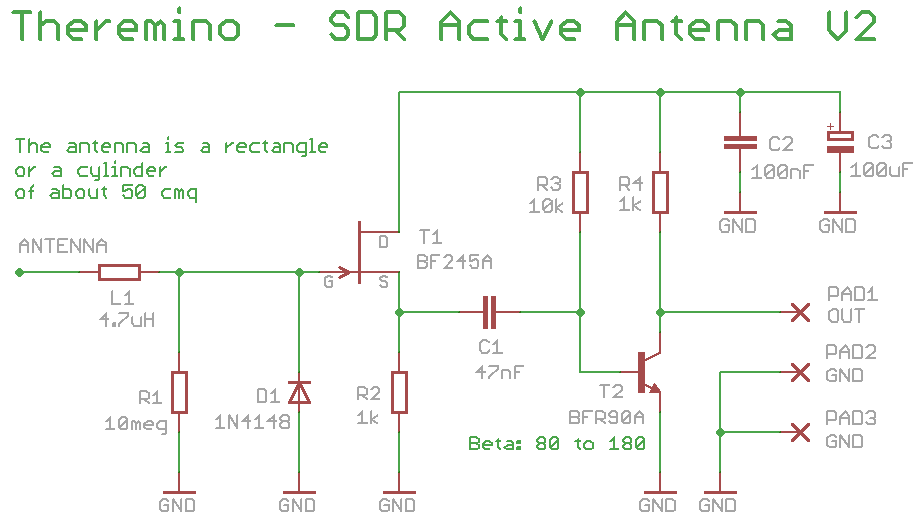
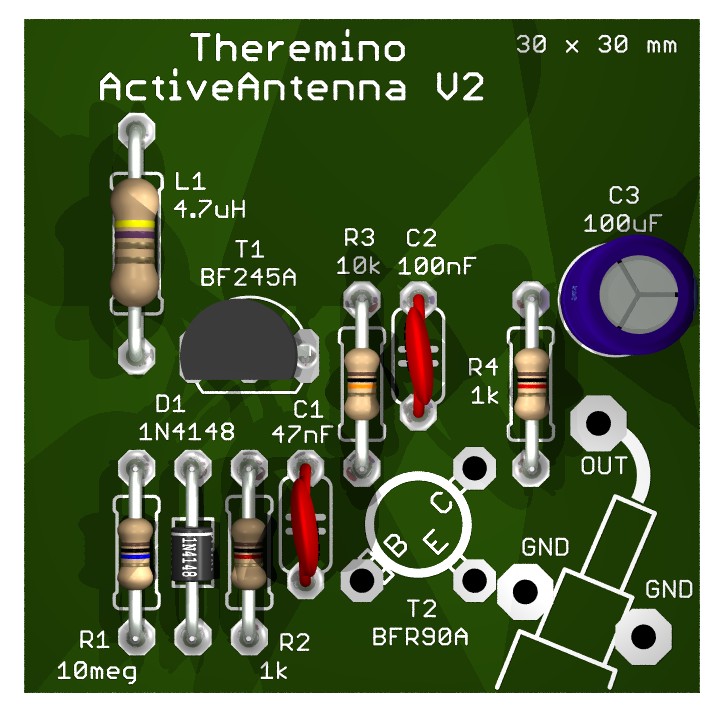
Consigli per la costruzione
Per ottenere una banda passante piatta fino a 50 Mhz, il transistor del secondo stadio deve avere una frequenza di taglio di molti GHz. Il miglior transistor è sicuramente il BFR90A, che è economico e reperibile facilmente su eBay. Chi volesse sperimentare potrebbe provare i BFR35A e BFR93A, oppure anche i SS9018 F/G/H, gli MPSH10 e i BF199A. Sostituendo il BFR90A con altri transistor la curva di risposta peggiora nella zona alta (da 10 a 50 MHz). Ma si potrebbe accettarlo, dato che i segnali più interessanti sono nella zona tra 10 KHz e 10 MHz.
La curva di risposta ha una zona di grande attenuazione intorno ai 100 MHz. Questo accorgimento serve per eliminare i forti segnali delle stazioni commerciali della banda FM (da 88 a 108 MHz). Per ottenere la massima attenuazione la induttanza L1 deve essere “a cavallo” di una zona di massa. Questa massa fa da schermo tra la antenna e le aree di rame sensibili collegate al Gate del FET. La induttanza L1 deve avere una frequenza di auto-risonanza intorno ai 100 MHz. Sono ottime le piccole induttanze che sembrano resistori da 1/8 watt, ma sono di colore colore acqua-marina. I valori di induttanza più adeguati, per ottenere la massima attenuazione a 100 MHz, sono 3.3 uH, 3.9 uH oppure 4.7 uH, a seconda del costruttore.
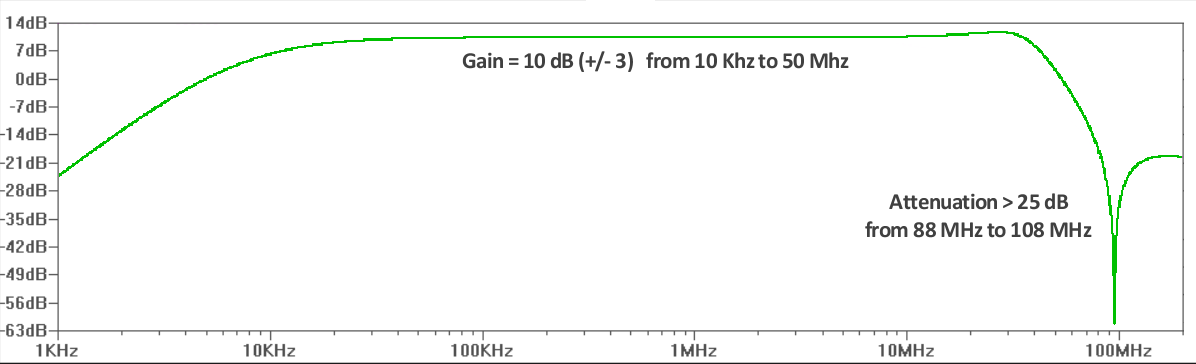
Costruzione meccanica
L’elemento ricevente deve essere conduttivo con un’area di almeno 25 centimetri quadri. Una antenna attiva è un puro condensatore e la sua capacità deve essere almeno alcune volte maggiore della capacità di ingresso del circuito amplificatore. Il miglior circuito di ingresso con i migliori FET e un diodo di protezione ha circa 2 pF di capacità, quindi se la antenna fosse da 2pF si perderebbe metà del segnale (6 decibel). Con 50 cmq la capacità elettrica è circa 10 pF e si perde solo una frazione di dB.
Per i particolari della costruzione guardare con attenzione le immagini che si trovano nella cartella “Construction” del file “SDR_ActiveAntenna_V2.zip”.
Le dimensioni sono:
- Diametro del tubo esterno (da impianto elettrico) = 32 mm (esterno) e 28 mm (interno)
- Lunghezza del tubo esterno (da impianto elettrico) = 100 mm
- Diametro del tubo interno ricoperto di nastro di rame adesivo = 27 mm
- Lunghezza del tubo interno ricoperto di nastro di rame adesivo = 60 mm
L’insieme del circuito stampato e tubo interno dovrebbero strisciare leggermente nel tubo esterno. Deve essere possibile infilarli e sfilarli facilmente, ma devono rimanere stabili anche in caso di scossoni provocati dal vento. Si ottiene questo limando lateralmente il circuito stampato, e posizionando dei goccioloni di stagno sul cilindro di rame per ingrandirlo. Quando si infila l’insieme interno si preme il cilindro esterno sul tavolo, in modo da ovalizzarlo un po’ e facilitare l’inserimento.
Si devono anche trovare due tappi in plastica, uno superiore e uno inferiore, che calzino perfettamente uno all’esterno e uno all’interno del tubo. Per trovarli si fruga in bagno tra i vari flaconi di shampoo, deodoranti e profumi e anche tra i medicinali. I flaconi delle grosse pastiglie effervescenti di vitamina C, o di integratori alimentari, dovrebbero essere adatti per la parte inferiore.
Il tubo esterno dovrebbe essere bianco, per scaldarsi meno quando c’è il sole. E all’interno del tubo interno ricoperto di rame, si deve posizionare un sacchetto di gel di silice, per assorbire l’umidità residua.
Fare molta attenzione a rendere tutto perfettamente stagno, con nastro di teflon, colla, silicone e ogni altro accorgimento necessario. Attenzione che alcuni tappi di deodoranti hanno un piccolo forellino per far passare l’aria, in tal caso si deve chiuderlo con colla o con un ferro caldo. La antenna dovrebbe poter stare sott’acqua per anni senza far entrare una sola goccia, altrimenti non resisterà nemmeno al primo inverno.
Posizionare l’antenna
Acquistare un tubo da impianto elettrico da 32 mm di diametro  e lungo 100 o 150 centimetri. Deve essere un tubo del tipo con un lato più grande per infilare il tubo seguente.
e lungo 100 o 150 centimetri. Deve essere un tubo del tipo con un lato più grande per infilare il tubo seguente.
L’antenna non deve stare per forza in verticale sul tetto. Potrebbe anche sporgere da una finestra con un tubo di un metro o due. Oppure il tubo potrebbe passare tra le tegole e uscire orizzontale dal tetto di fianco alla grondaia. O si potrebbe fascettare il tubo al palo di antenna e farlo sporgere in alto, sopra alla antenna della televisione, o anche sotto ma di fianco in modo da allontanare la antenna dal palo. O magari legarlo alla ringhiera di un terrazzo, con il tubo inclinato un po’ in fuori.
L’importante è che l’antenna sia all’esterno, più lontano possibile dall’impianto elettrico della casa, in posizione più alta possibile e più lontano possibile dai muri e ringhiere.
Fissare l’antenna sul tetto
Fissare il tubo a una ringhiera metallica, o sul tetto, con la parte ingrandita in alto. Infilare la antenna in alto, facendo passare il cavo schermato nel tubo e facendolo uscire da sotto.
Per poter scollegare e ricollegare facilmente la antenna, il suo cavo schermato deve essere corto (circa due metri) e lo si deve giuntare al lungo cavo di discesa. Si fa questa giunta alla base del tubo e la si isola dalla umidità con un sacchetto di plastica. Si avvolge il sacchetto e lo sigilla attorno ai cavi con molti giri di nastro o di corda. E infine si infila il sacchetto nella base del tubo della antenna in modo che stia al riparo dalla pioggia e dal sole.
Non fatevi problemi a fare giunte “laterali”, non stiamo lavorando con le microonde. Per cui qualunque tipo di giuntura non influisce sulla ricezione. Non importa la forma e l’aspetto della giuntura. Basta che sia elettricamente ben collegata, ben isolata e perfettamente al riparo dalla umidità. E per ottenere questo il modo migliore è arrivare con i due cavi paralleli e ben spellati e giuntarli arrotolando le due calze e i due fili interni.
Non fatevi tentare da connettori o da giunture di bell’aspetto. Una giuntura laterale grossolana e semplice è la soluzione più sicura, e anche la più comoda da collegare e scollegare.

Infine si piega la calza all’indietro, si sigilla in un sacchetto e si inserisce il tutto nella base del tubo.
Download del progetto completo contenente i file Eagle del circuito stampato, le simulazioni e immagini relative alla costruzione:
https://www.theremino.com/wp-content/uploads/files/SDR_ActiveAntenna_V2.zip
Adattatore tra Antenna Attiva e ricevitori onde corte
La Theremino ActiveAntenna è progettata per collegarla al Theremino UpConverter che le fornisce la alimentazione e la regolazione di sensibilità. Il particolare circuito di ingresso dell’UpConverter fornisce una banda passante perfettamente piatta senza usare componenti speciali. Ma soprattutto elimina i disturbi provenienti dalla alimentazione in modo elegante, fornendo la alimentazione al lato “freddo” del resistore di terminazione da 50 ohm.
Se si vuole collegare questa antenna a un ricevitore per onde corte che non invia la alimentazione sul cavo stesso. Si deve utilizzare un alimentatore esterno da 5 Volt (o meglio da 12 Volt).
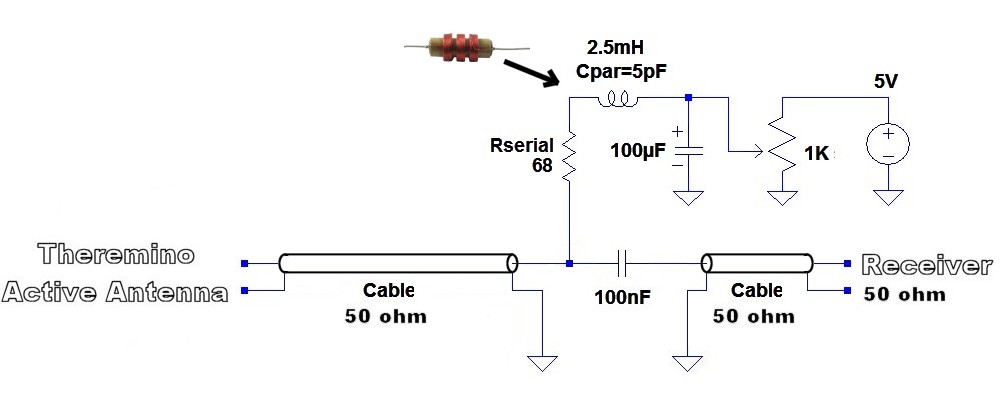 Descrizione del circuito
Descrizione del circuito
Questo è lo schema classico che si usa normalmente per alimentare le antenne attive. Il punto debole di questa configurazione è l’induttore, che dovrebbe essere di valore molto alto (oltre i 10 mH), per non danneggiare la risposta alle frequenze più basse. Ma induttori di valore così alto avrebbero troppa capacità parassita e quindi danneggerebbero la riposta alle frequenze alte. Per cui si sceglie un compromesso e si usano induttori da pochi mH e avvolti in sezioni multiple. Questi induttori sono difficili da trovare, costano molto e la banda passante non è mai perfettamente piatta. Vedremo alla fine di questo articolo come fare a meno di questo componente.
Il potenziometro (lineare) da 1k serve per regolare la sensibilità della antenna. Il campo di regolazione va da +8dB fino a una forte attenuazione. Si regola per la massima sensibilità, ma senza arrivare al punto dove i segnali forti iniziano a generare disturbi di inter-modulazione. Il punto di migliore regolazione varia a seconda dell’ora del giorno e della propagazione per cui questa regolazione è importante e molto utile.
Il condensatore da 100 uF elimina il rumore proveniente dalla alimentazione. Se l’alimentatore produce disturbi nelle bande delle onde corte è bene usare un condensatore a basso ESR, oppure aggiungergli, in parallelo, uno o più condensatori ceramici da 100 nF o 1 uF, fino a eliminare o attenuare i disturbi a sufficienza. Questo è un punto critico di questo adattatore, eventualmente provare anche a cambiare alimentatore e scartare assolutamente gli alimentatori di tipo switching.
La resistenza “Rserial” serve per limitare la corrente di alimentazione della antenna, che non deve superare una quindicina di milliAmpere, per non danneggiare il suo transistor di uscita. Questa resistenza deve valere circa da 50 a 80 ohm e comprende anche la resistenza interna dell’induttore. Quindi si deve misurare l’induttore con un tester e variare questo resistore di conseguenza. Se ad esempio l’induttore ha una resistenza interna da 25 ohm, useremo una “Rserial” da 33 o da 47 ohm.
L’induttore marcato 2.5 mH è il componente più difficile da trovare, deve avere una bassa capacità parallela. L’immagine con la freccia indica il tipo di induttore che potrebbe andare bene. Sono induttori a sezioni separate per diminuire la capacità. Non è facile trovarli, questo è un esempio di rivenditore con un prezzo ragionevole.
Se l’induttore ha una capacità parallela troppo alta la banda passante diventa meno lineare, come visibile nella prossima immagine.
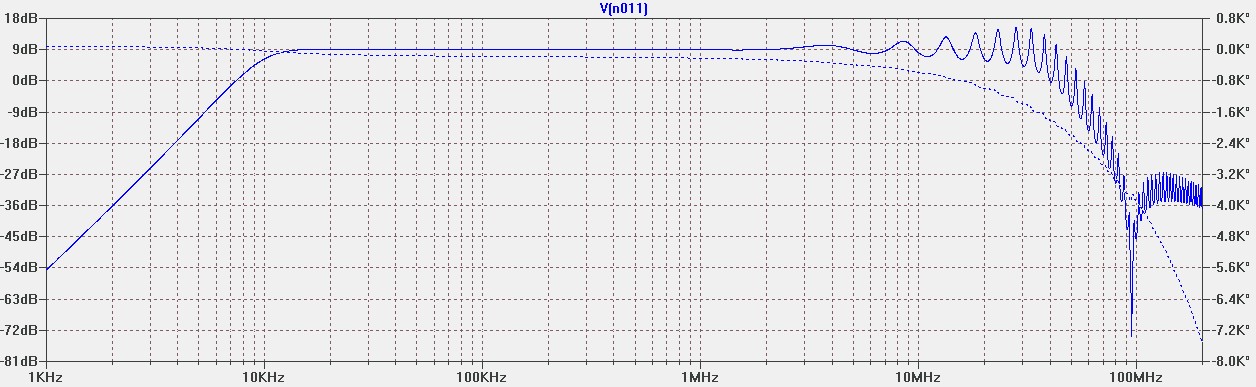
Induttori inadatti, ad esempio avvolti su ferrite non progettata per queste frequenze, possono causare variazioni anche maggiori e, nei casi peggiori, eliminare completamente alcune bande di frequenza.
Versione senza induttore
Una ottima alternativa (ma solo se si dispone di una alimentazione da 12 Volt) è eliminare completamente sia l’induttore che “Rserial”, e sostituire ambedue con un resistore da 470 ohm.
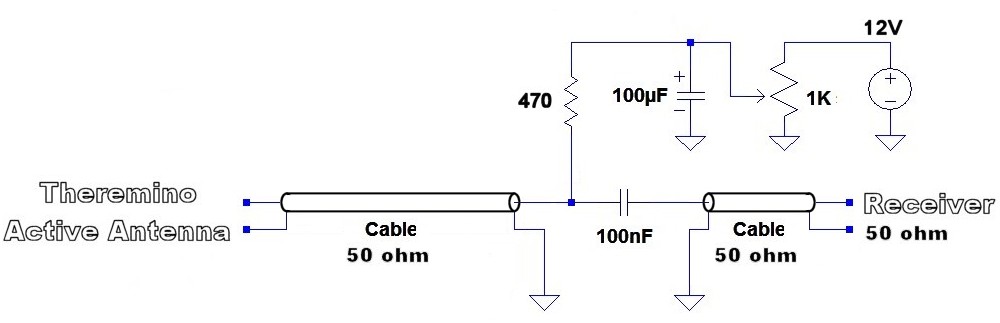
Questa versione è più facile da costruire, non usa componenti speciali, ha un’ottima risposta in frequenza e anche una certa attenuazione dei disturbi provenienti dalla alimentazione.
Accettando un leggero peggioramento della risposta in frequenza, si potrebbe anche alimentare questo circuito con 9 Volt al posto del 12 Volt (sostituendo il resistore da 470 ohm con uno da 220 ohm). Ma è del tutto sconsigliabile usare batterie da 9 Volt perché si scaricherebbero in meno di un giorno. Impossibile ridurre ulteriormente la tensione di alimentazione, altrimenti si dovrebbe ridurre troppo il resistore e la risposta in frequenza peggiorerebbe in modo intollerabile.
Download delle simulazioni LTSpice e delle immagini per le varie versioni di questo adattatore:
ActiveAntennaToStandardReceiverAdapter.zip
Adattatore tra Antenna Attiva e ricevitori che alimentano la antenna attraverso il cavo
Se si vuole collegare la Theremino ActiveAntenna a un ricevitore che fornisce tensione sul connettore di antenna si deve interporre un adattatore. Se la si collegasse direttamente si potrebbe danneggiare il suo transistor di uscita inviandogli troppa corrente.
Questa versioni di adattatori sono semplici, non utilizzano componenti difficili da trovare e permettono anche di regolare il guadagno della antenna. Regolare il guadagno è molto importante per far lavorare sempre la antenna al massimo della sensibilità senza superare il punto che produce disturbi da inter-modulazione.
Versione per ricevitori che forniscono 5 volt sul cavo (da esempio RTL-SDR V3)

Versione per ricevitori che forniscono 12 volt sul cavo
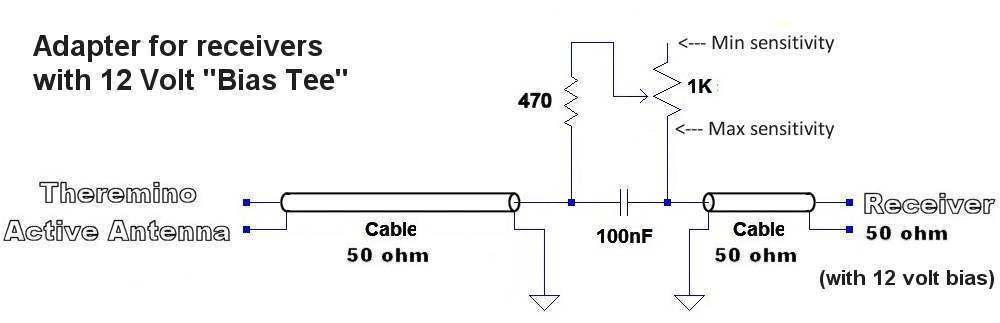
ADC a 24 bit e 16 canali
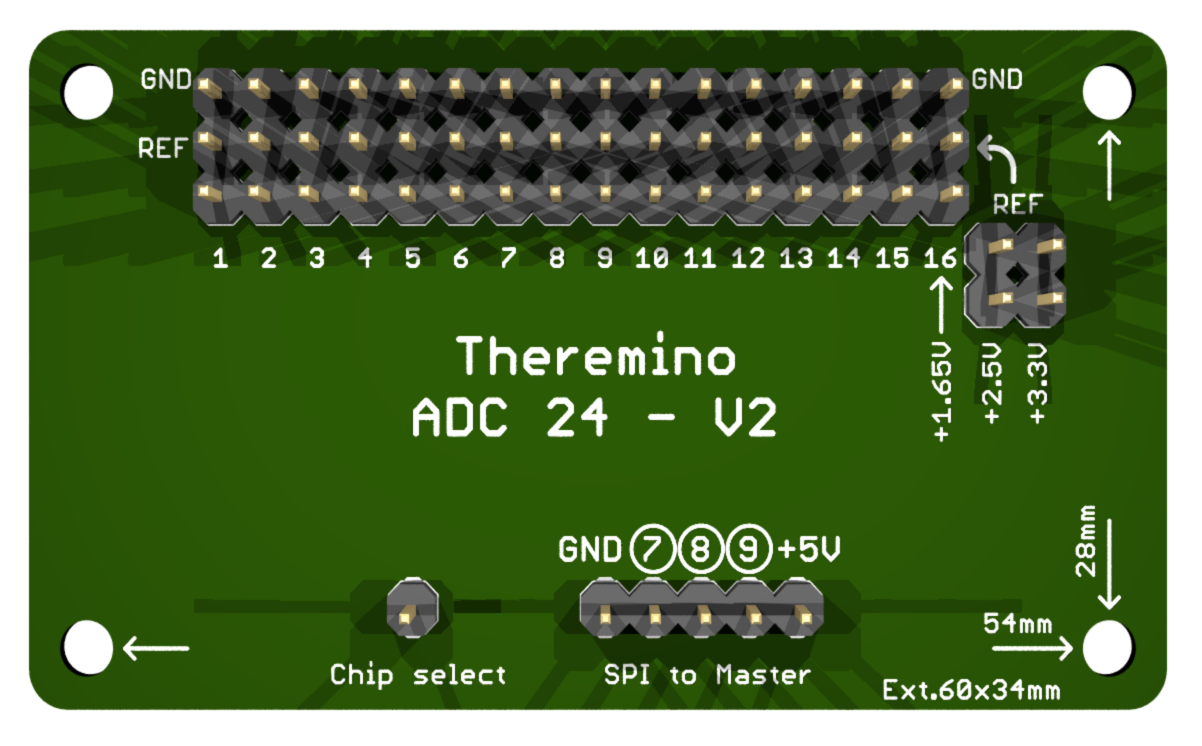
Questo modulo apre la strada a mille possibili applicazioni. Con poca spesa si entra nel mondo delle misure di alta precisione.
Semplicemente collegando qualche filo, si realizzano applicazioni che altrimenti richiederebbero instabili pre-amplificatori, difficili da costruire e da regolare. Buoni esempi sono la lettura delle celle di carico e la amplificazione diretta dei Geofoni e degli accelerometri.
Si possono misurare tensioni e correnti, con precisione superiore a quella di un buon tester e con risoluzione anche mille volte superiore. Si possono collegare fotodiodi per illuminazioni debolissime, come gli analizzatori di spettro a fenditura, ma anche magnetometri, microbarometri, potenziometri lineari per la rilevazione di spostamenti e fratture, celle di carico, bilance analitiche, misuratori di pressione, sensori di flessione meccanica, termocoppie, misuratori di pH, datalogger di tensioni e correnti, etc…
CONSIDERAZIONI DI SICUREZZA
La massima tensione applicabile agli ingressi va da zero Volt a 3.3 Volt positivi. Gli ingressi possono essere connessi direttamente ai sensori (ad esempio Geofoni o Celle di carico), ma per costruire un data-logger, in grado di misurare tensioni più alte (e sopportarle senza rompersi), si dovranno aggiungere due resistori per ogni ingresso.
Per il funzionamento dell’Adc24 sono necessari:
1) Applicazione HAL con versione 6.6 (o seguenti), che si scarica da questa pagina.
2) Un modulo Master con firmware 5.0 (o seguenti), che si scarica da questa pagina.
Download della documentazione con immagini ed esempi:
Theremino_ADC24_ITA.pdf
Theremino_ADC24_ENG.pdf
Download dei documenti originali, in formato ODT, per i traduttori:
Theremino_ADC24_Original_Docs.zip
Connessione e configurazione
Il modulo ADC24 si collega al connettore del modulo Master, tramite cinque cavetti Dupont, di tipo femmina femmina, reperibili su thereminostore,

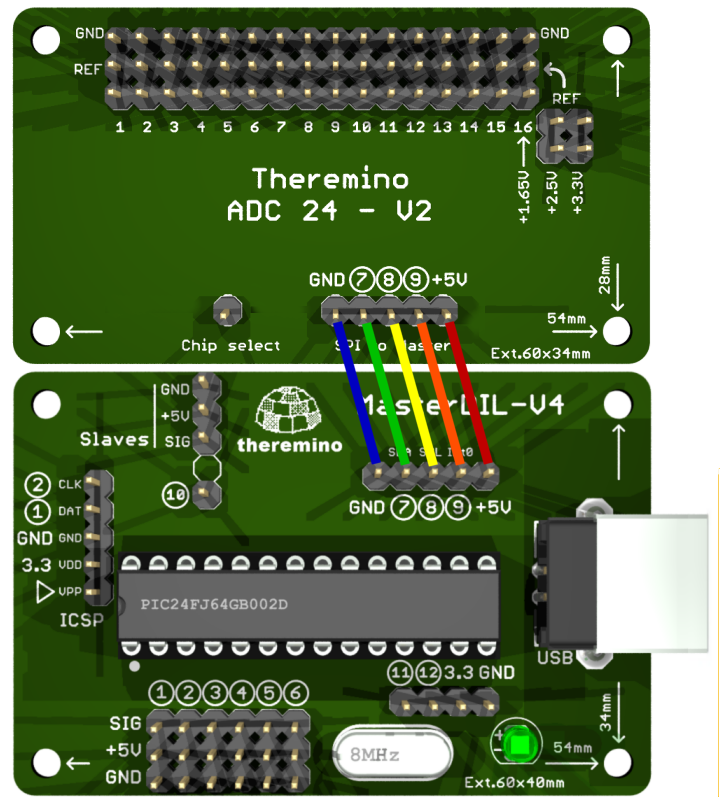
I cavi di collegamento possono essere lunghi da 5 cm in su (anche fino a molti metri). Non trovandoli della lunghezza giusta si potrebbe cercarli su eBay, oppure usare connettori femmina da saldare o da crimpare.
Collegare correttamente il cavo. Il giusto ordine è GND, 7, 8, 9, +5, come indicato nella serigrafia.
Per iniziare si avvia la applicazione HAL, si seleziona il Pin 7 e si sceglie il tipo ADC24.
Se non si riesce a impostare il tipo Adc24 nel Pin 7 allora il Master non ha il firmware aggiornato (versione 5.0 o seguenti), oppure non si è scaricato l’HAL aggiornato (versione 6.6 o seguenti).
A questo punto dovrebbero apparire i 16 Pin dell’ADC24.
Sul Pin 7 si regolano le caratteristiche comuni per tutti i sedici Pin di ingresso: Il numero di Pin abilitati, il numero di campionamenti al secondo e il tipo di filtraggio (Il numero effettivo di campionamenti per ogni ingesso decresce se si usano numerosi ingressi e filtri lenti).
Inizialmente i Pin dell’ADC24 sono tutti “Unused” e sono ancora da regolare. Le regolazioni sono molto simili ai normali Pin del sistema Theremino. Le uniche novità sono la velocità generale (10, 12, 20, 30, 50, 60, 100, 120 … fino a 19200 campioni al secondo), la amplificazione per ogni singolo canale (1, 2, 4 … fino a 128), e il tipo di canali (Single ended, Pseudo differenziali, o Differenziali).
In tutti i casi la tensione minima misurabile è zero Volt e la massima è 3.3 Volt. Per misurare tensioni al di fuori di questo campo si devono usare componenti aggiuntivi.
Importante notare che gli ingressi sono sempre a coppie (1-2, 3-4, 5-6 ….. 15-16) e che le regolazioni valgono per tutti e due gli ingressi della coppia. L’unica regolazione indipendente, che è possibile abilitare o disabilitare su ogni singolo Pin è “Biased to Vmax/2”.
Il modo più semplice di utilizzo è:
- Impostare gli ingressi come Differenziale (quindi lavorano a coppie)
- Collegare direttamente fino a otto geofoni ai Pin 1-2, 3-4, 5-6, 7-8, 9-10, 11-12, 13-14, 15-16.
- Scegliere il guadagno preferito per ogni geofono (tutti a 1 per i terremoti, tutti a 64 per HVSR)
- Polarizzare il secondo Pin di ogni coppia abilitando “Biased to Vmax/2”
- IMPORTANTE: Controllare che solo il secondo Pin della coppia sia polarizzato.
Istruzioni più dettagliate nel manuale di utilizzo (che si scarica all’inizio di questo capitolo) e nelle istruzioni che si scaricano con la applicazione HAL.
Costruzione
Il circuito stampato è molto curato. Piste robuste, isolamenti generosi e grande attenzione nella disposizione dei componenti. La topologia delle connessioni alle massa è ottimizzata, con aree analogiche e digitali ben separate, per minimizzare il rumore. Il PCB è a singola faccia e tutti i connettori sono a passo 2.54, anche tra i connettori distanti tra loro.
Sono disponibili anche i file STL per stampare un supporto in plastica per il modulo Adc24 con le stampanti 3D.
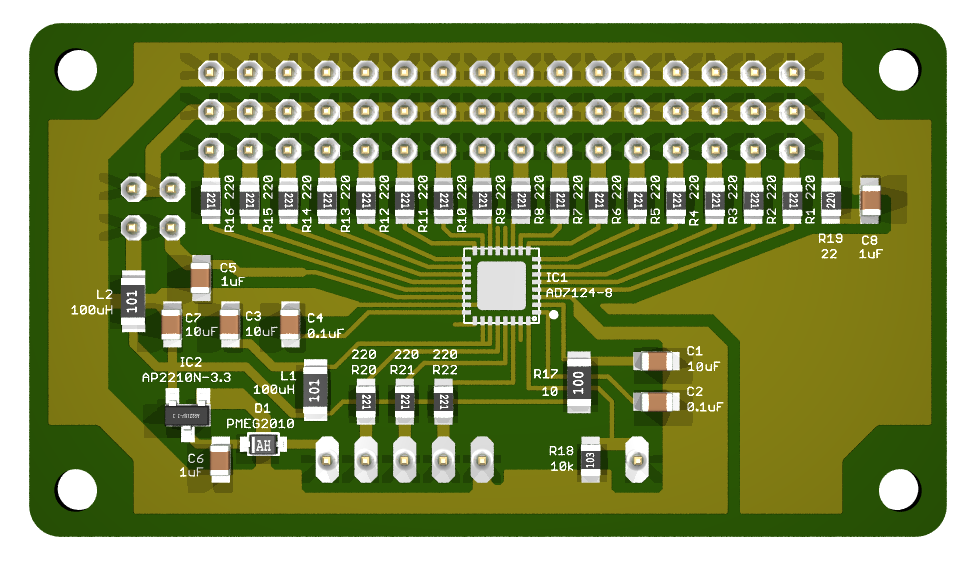
Questa è la versione definitiva dell’ADC24, si consiglia di rinfrescare la pagina con il tasto F5, per essere sicuri di vedere le immagini aggiornate (con la sigla V2).
Il modulo Adc24 è molto piccolo, è largo 60 mm come un Master, ma alto solo 35 mm. I canali sono 16 single ended, 15 pseudo differenziali, oppure 8 differenziali. Le velocità sono regolabili da 10 a 19200 campionamenti al secondo. Questo vuol dire che si può arrivare oltre i 1000 campioni al secondo per tutti i sedici canali contemporaneamente attivi. Il guadagno di ogni canale è regolabile da 1 a 128. Il rumore è molto basso e può quasi competere con i Theremino GeoPreamp.
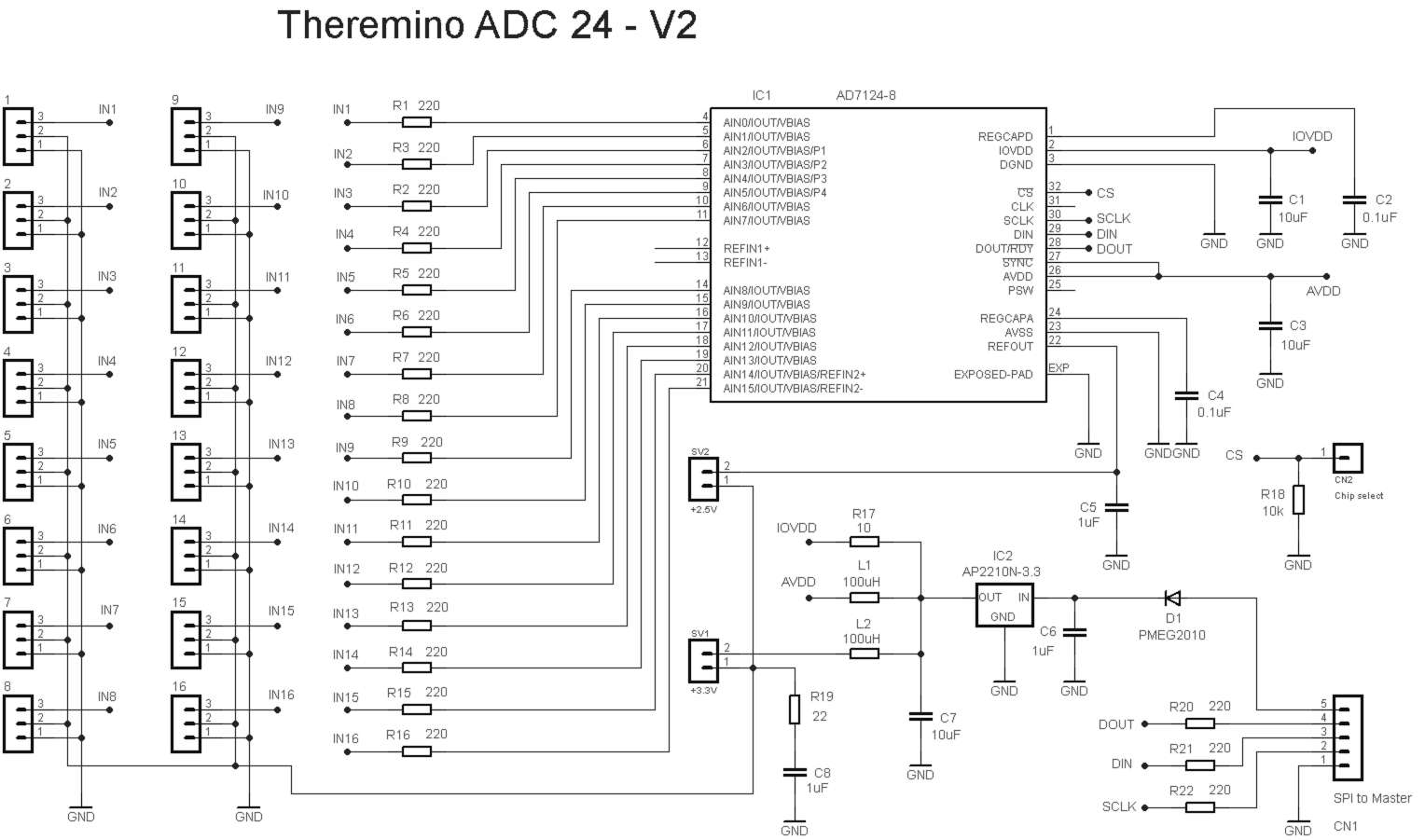
L’ADC usato è un AD7124-8 di Analog Devices, con caratteristiche superiori ai classici LTC2499, che si usano sugli Shield di Arduino. Ha un amplificatore interno, regolabile da 1 a 128 volte, mentre allo Shield di Arduino si dovrebbe aggiungerlo esternamente. Ha un rumore estremamente basso (circa 25 nV rms contro 600 nV rms), ed è anche velocissimo (fino a 19200 campioni al secondo contro 15 circa). Quindi è più semplice da usare, venti volte meno rumoroso, e oltre mille volte più veloce, dell’ADC dello Shield di Arduino. Un AD7124-8 costa due o tre Euro in più di un LTC2499, ma le sue ottime caratteristiche li valgono tutti.
Lo AD7124 ha anche caratteristiche superiori rispetto agli ADC dei logger commerciali. Come è possibile? Perché lo AD7124 è stato progettato nel 2015, mentre gli apparecchi in commercio, anche i più costosi, contengono ADC che hanno mediamente una decina di anni.
Download del progetto completo contenente i file Eagle del circuito stampato, gli schemi, le immagini i e la lista dei componenti:
Adapter_ADC24_V2.zip
Attenzione: La serigrafia dei primi lotti di Adc24_V2, che si acquistano su eBay e thereminoshop, indicava una altezza e un interasse verticale leggermente maggiori del reale. L’altezza è 34 mm (non 35) e l’interasse verticale è 28 mm (non 30). Nei lotti seguenti questo errore è stato corretto.
Applicazione Theremino AdcTester
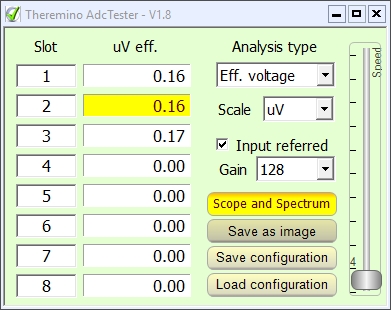
Con l’AdcTester si possono controllare il guadagno, il rumore di fondo e la intermodulazione tra i canali, sia degli Adc a 8 e 16 bit, che di quelli a 24 bit.
L’AdcTester è stato scritto per controllare le prestazioni degli Adc24. I successivi test hanno dato valori conformi alle caratteristiche dei data-sheet e in alcuni casi anche migliori. Inoltre tutti gli esemplari di Adc24 e tutti i canali, hanno dato valori molto simili tra loro.
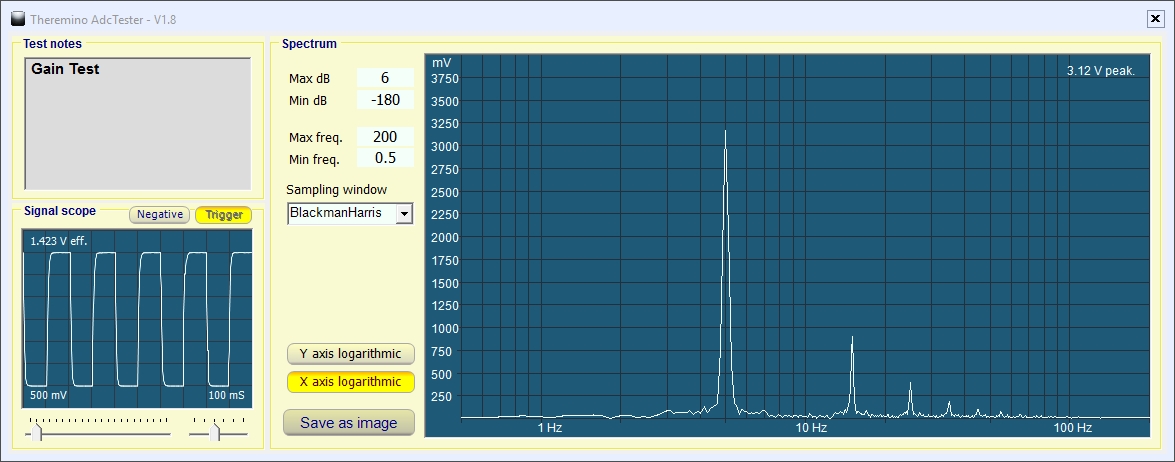
Il rumore degli Adc24 è risultato di 0.17 uV efficaci, solo leggermente superiore a quello dei GeoPreamp che era di 0.10 uV efficaci. Il guadagno identico entro lo 0.01 % (tra i canali) e entro l’1% (tra diversi dispositivi). La intermodulazione tra i canali è risultata così bassa da essere difficilmente misurabile.
Le prove con questa applicazione ci hanno permesso di individuare i punti critici dei primi prototipi di tromografo. I difetti maggiori stavano nei cavi di collegamento non schermati, nella mancanza del condensatore di filtro antialiasing e nella imprecisa regolazione dei parametri.
Per consigli su come costruire perfetti tromografi leggere la documentazione di questa applicazione (che si scarica nelle prossime righe) e la documentazione dell’Adc24 (che è nel capitolo precedente).
– – – –
Download della documentazione con immagini ed esempi
Theremino_AdcTester_ITA.pdf
Theremino_AdcTester_ENG.pdf
Download dei documenti originali, in formato ODT, per i traduttori
Theremino_AdcTester_Original_Docs.zip
– – – –
Note per le versioni
Versione 1.8: Prima versione pubblicata. A differenza delle versioni precedenti ora il valore efficace è il vero valore efficace (ottenuto con la radice della media degli scarti quadratici – Root Mean Square)
Versione 1.9: Grazie al nuovo timer di precisione (nella classe “Accurate Timer”) le frequenze misurate sono molto più precise e non dipendono dal carico di lavoro del sistema operativo e della CPU.
Versione 2.0: Migliorato il trigger.
Downloads di Theremino_AdcTester – Versione 2.0
Theremino_AdcTester_V2.0
Theremino_AdcTester_V2.0_WithSources
Per tutti i sistemi Windows a 32 e 64 bit. Per Raspberry Pi, Linux, Android e OSX, leggere le note di installazione.
Adc con Trigger di Schmitt
In alcuni casi può essere utile trasformare gli ingressi digitali in Adc. Ad esempio potrebbe accadere di utilizzare i NetModule basati su ESP8266, che hanno un solo Adc, e aver bisogno di più ingressi analogici. Oppure i sei ingressi Adc del Master potrebbero non essere sufficienti.
In altri casi potrebbe essere necessario aggiungere uno Schmitt Trigger a un ingresso che non lo ha. Ad esempio utilizzare gli ingressi digitali di un NetModule con segnali di ingresso analogici.
I circuiti seguenti risolvono questi casi in vari modi.
Aumentare il numero di ingressi Adc
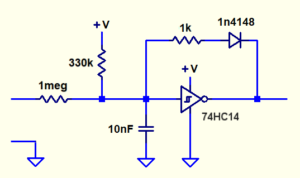
Questo circuito è un oscillatore che varia la sua frequenza di uscita da 500 a 1000 Hz (circa) a seconda della tensione di ingresso. Lo si collega a un ingresso di un NetModule o di un Master configurato come “Period”. Poi si imposta l’ingresso con “Converti in frequenza” e infine si regolano le due caselle “Frequenza minima” e “Frequenza massima”, per ottenere che il segnale di uscita abbia la normale estensione da zero a mille.
Se si utilizza questo circuito con un NetModule, la tensione +V sarà collegata al 3.3 volt o al 5 volt a seconda che si abbiano segnali di ingresso con escursione di 3.3 volt o di 5 volt. Se invece si utilizza questo circuito con il modulo Master allora il +V deve essere collegato al 3.3 volt.
Aggiungere uno Schmitt Trigger agli ingressi
Gli ingressi digitali dei NetModule basati sullo ESP8266 non sono di tipo Schmitt-Trigger, per cui per evitare falsi conteggi si dovrebbe aggiungere esternamente uno Schmitt-Trigger. Ad esempio i 74C14, 74HC14, CD40106 o HEF40106 che ne contengono sei, oppure il 74v1g14 che è piccolo e ne contiene uno solo.
Questo circuito è simile al precedente. Basta eliminare tutti i componenti che non servono (resistori condensatore e diodo) e si possono utilizzare gli stessi circuiti stampati del precedente anche per questo.
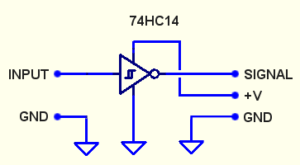
La tensione +V sarà collegata al 3.3 volt o al 5 volt del NetModule, a seconda che si abbiano segnali di ingresso con escursione di 3.3 volt o di 5 volt.
Con il modulo Master questo circuito non è mai necessario, perché il Master ha già gli Schmitt Trigger al suo interno.
Ingresso singolo di tipo Schmitt Trigger o Adc
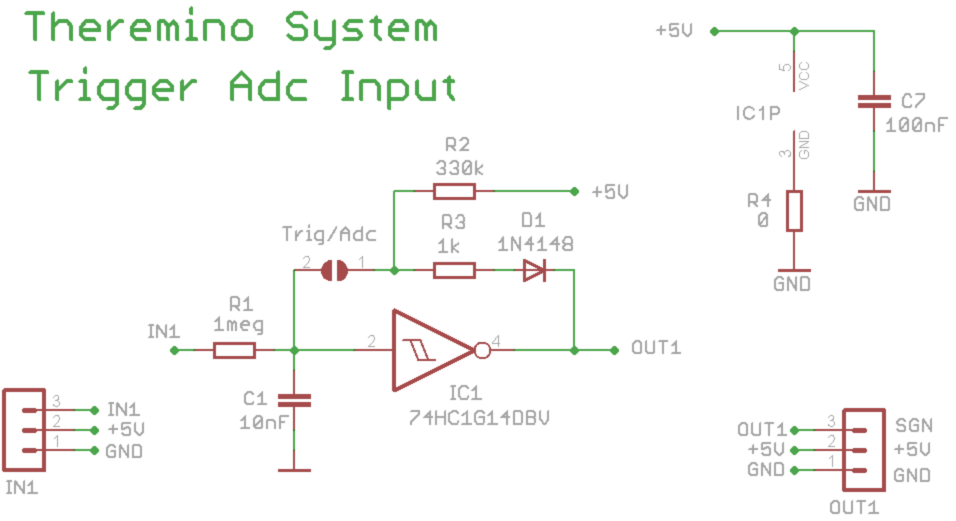
Questa versione è molto piccola, appena 12.5 x 25 mm, per cui si può tagliare a metà un cavetto femmina femmina e saldarlo di piatto sulle sei piazzole di ingresso uscita. Poi lo si ricopre con una guaina termo-restringente e si ottiene un convertitore che sta lungo il cavo, non occupa spazio e non richiede di essere avvitato o fissato in qualche modo.
Troverete questa versione con tutti i componenti già saldati su thereminostore o su eBay. La si può avere (o modificare facilmente) in due versioni:
- Con una goccia di stagno sul ponticello Trig/Adc, si ottiene un oscillatore che trasforma gli ingressi digitali in Adc.
- Senza goccia di stagno si ottiene un Trigger di Schmitt, con filtro passa basso in ingresso.
Per ottenere una buona stabilità con le variazioni di temperatura il condensatore C1 non deve essere ceramico ma in poliestere. In genere quelli rettangolari sono in poliestere, mentre quelli a goccia sono ceramici e non vanno bene.
Download del progetto del circuito stampato con immagini 3D e schemi elettrici
Adapter_TriggerInput.zip
Sei ingressi di tipo Schmitt Trigger o Adc
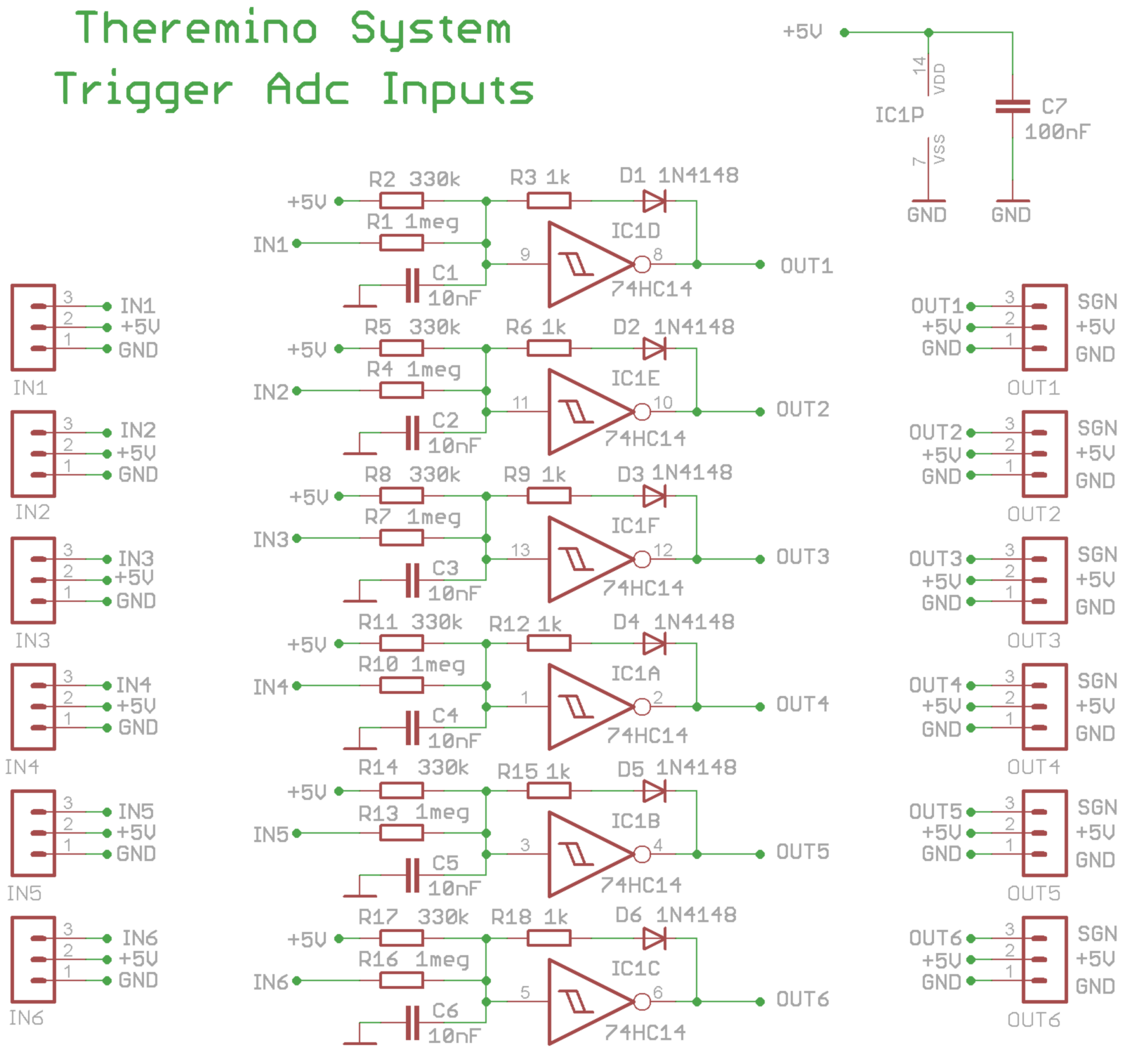
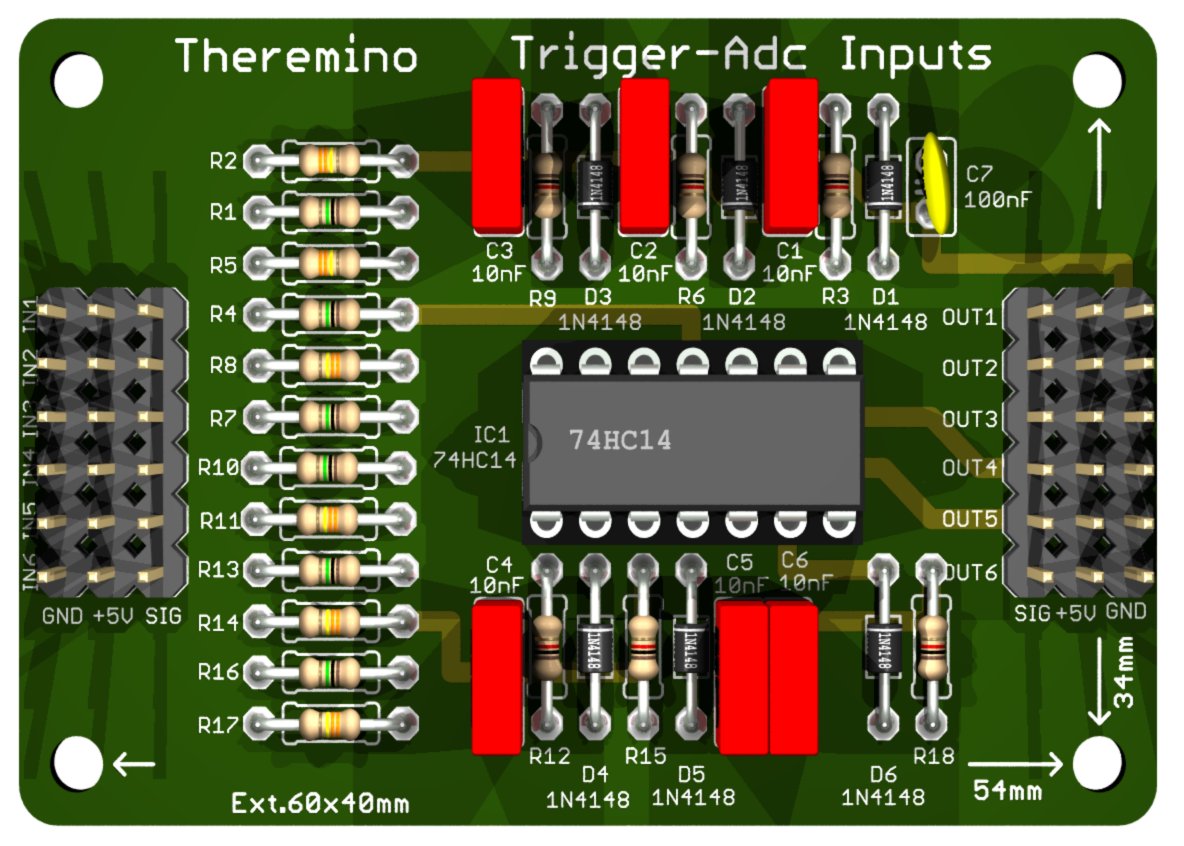
Chi avesse bisogno di sei ingressi Adc o Trigger di Schmitt potrebbe preferire questa versione. L’abbiamo progettata senza utilizzare componenti a montaggio superficiale, in modo da facilitare l’autocostruzione.
Potrete trovare i circuiti stampati su thereminostore o su eBay. Le dimensioni sono le stesse dei moduli Master e dei NetModule.
Per ottenere una buona stabilità con le variazioni di temperatura i condensatori da C1 a C6 non devono essere ceramici ma in poliestere. In genere quelli rettangolari sono in poliestere, mentre quelli a goccia sono ceramici e non vanno bene.
Download del progetto del circuito stampato con immagini 3D e schemi elettrici
Adapter_TriggerInputHex.zip
Caratteristiche degli Adc che si ottengono con questi circuiti
Questi adattatori hanno un rumore intrinseco maggiore degli Adc del Master. Li si può paragonare ad un Adc da 8 o 9 bit e con frequenza di campionamento di 500 Hz. Sono caratteristiche modeste ma sufficienti per molte applicazioni.
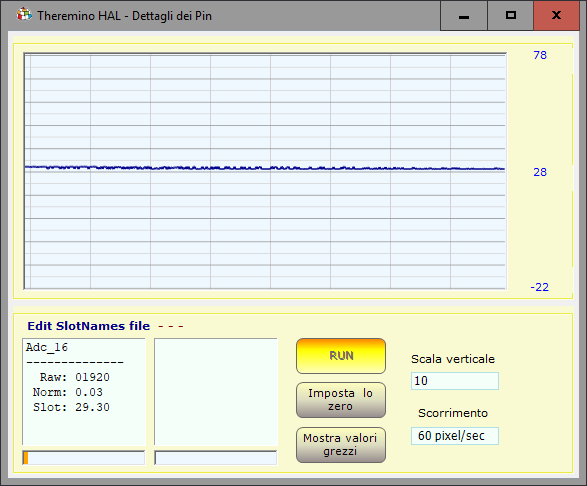
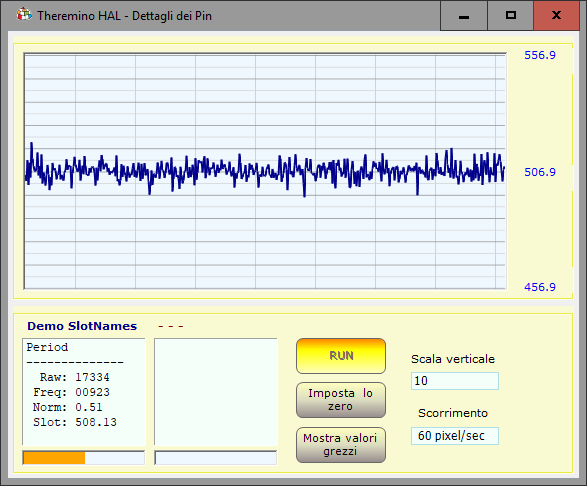
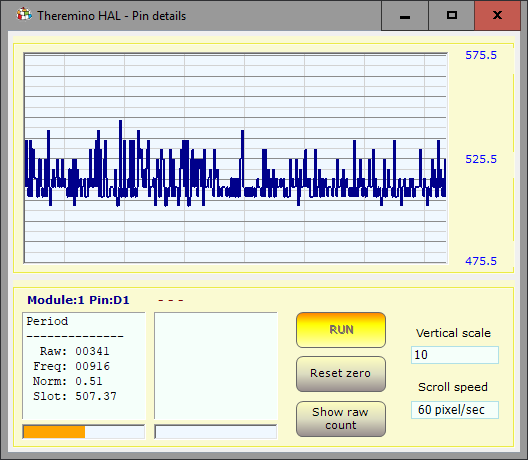
In queste immagini, da sinistra a destra, si vede il rumore degli Adc del Master, di un modulo TriggerAdc collegato a un Master e di un modulo TriggerAdc collegato a un NetModule.
In queste immagini la scala verticale è molto ingrandita per evidenziare il rumore. Ma guardando i tre segnali nelle normale scala da 0 a 1000, apparirebbero praticamente identici.
Regolare i convertitori Trigger-Adc nella applicazione HAL
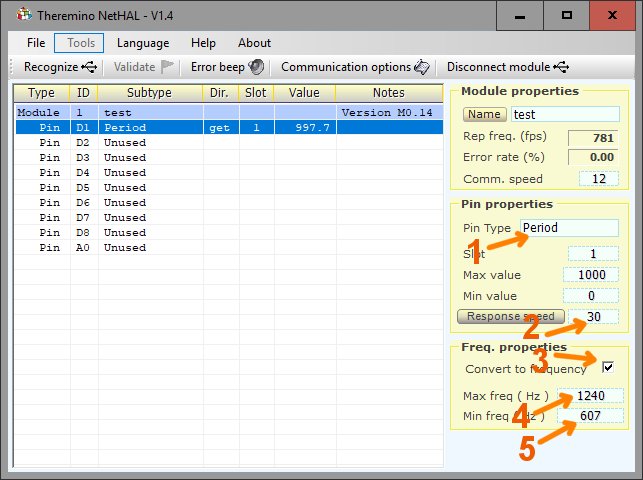
Con le opzioni delle applicazioni HAL e NetHAL si possono regolare gli ingressi in modo che questi Adc generino un segnale “normalizzato” da 0 a 1000.
- Si imposta il tipo di Pin come “Period”
- Si regola la casella “Response speed” con il valore 30
- Si preme il quadratino “Convert to frequency”
- Si porta l’ingresso del segnale alla massima tensione (3.3 o 5 volt) e si regola MaxFreq per ottenere approssimativamente il valore 1000 sullo Slot.
- Si porta l’ingresso del segnale alla minima tensione (zero volt) e si regola MinFreq per ottenere approssimativamente il valore zero sullo Slot.
Per i punti 4 e 5 è comodo avere un potenziometro collegato all’ingresso. Ed è anche utile fare doppio click sul Pin usato nella lista dei Pin in modo da aprire l’oscilloscopio.
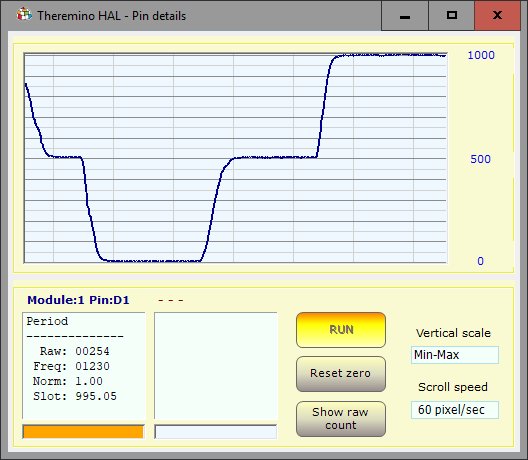
Con i valori “Freq:” e “Slot:” si può regolare l’Adc velocemente.
– Si mette a zero la tensione di ingresso, si legge il valore “Freq:” e lo si scrive nella casella “Min freq”.
– Si alza la tensione di ingresso al massimo, si legge il valore “Freq:” e lo si scrive nella casella “Max freq”.
Poi si aggiustano “Max freq” e “Min freq”, con la rotella del mouse, per leggere approssimativamente zero e 1000 nella casella “Slot:”.
Theremino PowerMeter
Questa applicazione concentra le migliori tecniche per misurare tensione, corrente e potenza (sia AC che DC). Come tradizione nel nostro sistema, non leggiamo i sensori direttamente, ma valori preparati negli Slot (solitamente da un HAL). In questo modo la flessibilità è totale e l’utente stesso può stabilire quali circuiti di misura utilizzare, da dove prendere i dati e come prepararli.
Il modulo di ingresso dei dati nel PC potrà essere un theremino Master che fornisce la massima semplicità o anche un Arduino, più difficile da usare perché va programmato, ma anche più flessibile. Per ottenere la potenza reale e il fattore di potenza bisogna per forza utilizzare il modulo Arduino.
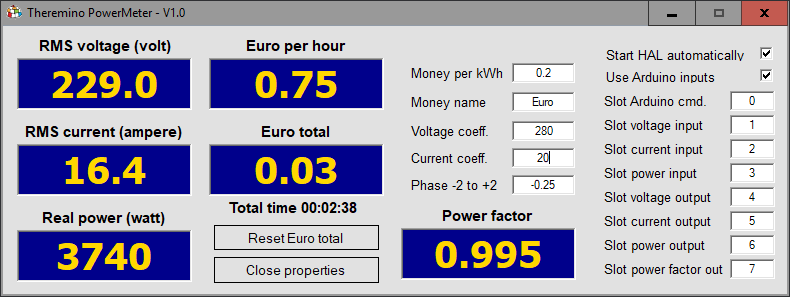
Per mezzo dei controlli sulla destra si può configurare la applicazione per differenti misure:
- Misurare solo la tensione.
- Misurare solo la corrente.
- Misurare tensione e corrente e calcolare la potenza apparente.
- Misurare i valori efficaci (RMS) di tensione e corrente.
- Correggere gli sfasamenti dei circuiti di misura.
- Tenere conto della forma d’onda di tensione e corrente.
- Calcolare la potenza reale e il fattore di potenza.
- Calcolare gli Euro (o altre monete) che si spendono ogni ora.
- Calcolare gli Euro (o altre monete) totali spesi dall’ultimo azzeramento.
- Inviare agli Slot di uscita i valori calcolati in modo che altre applicazioni possano utilizzarli.
Circuiti di misura per tensione e corrente
- Per misurare tensioni continue (riferite a massa), si utilizza semplicemente un partitore resistivo.
- Per misurare correnti continue si può utilizzare il sensore di corrente illustrato in questa pagina.
- Per misurare tensioni e correnti alternate (apparecchi collegati alla rete elettrica AC o potenza generata dai pannelli solari), abbiamo preparato tre tipi di circuiti di misura adattabili a diversi fondo-scala, da pochi volt a migliaia di volt, e da pochi ampere fino a migliaia di ampere.
Qui riportiamo solo le immagini che potrebbero essere utili per i collegamenti.
Le istruzioni complete e i particolari di tutti i circuiti di misura, sono nei file PDF della documentazione.
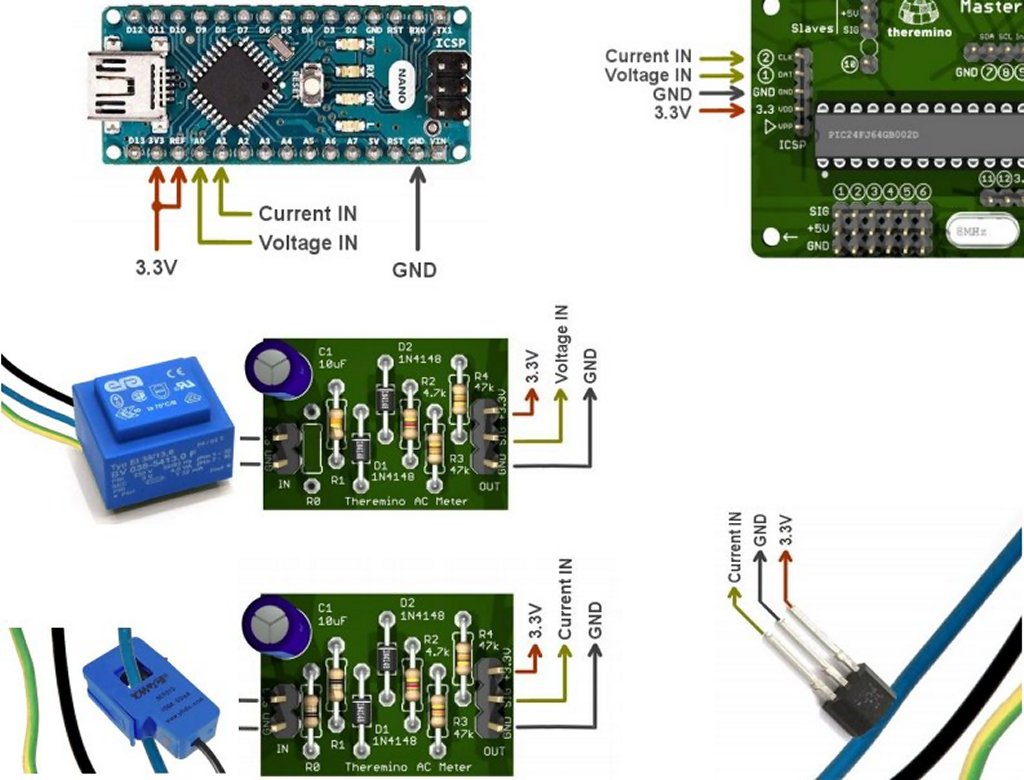
I due schemi seguenti sono i circuiti di ingresso per misurare la tensione e la corrente di rete. Il piccolo componente nero che sembra un transistor è un sensore di Hall per misurare la corrente in modo molto semplice.
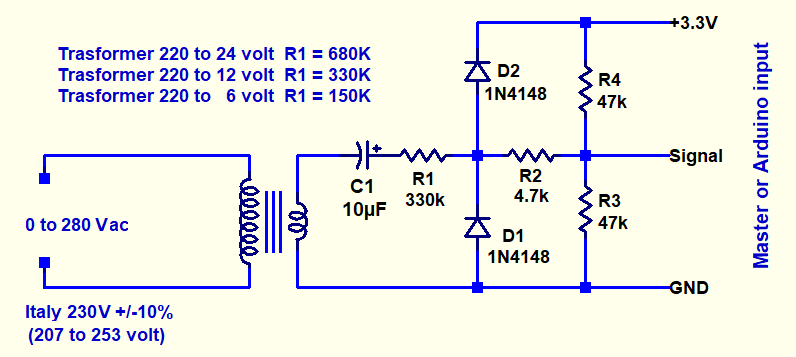
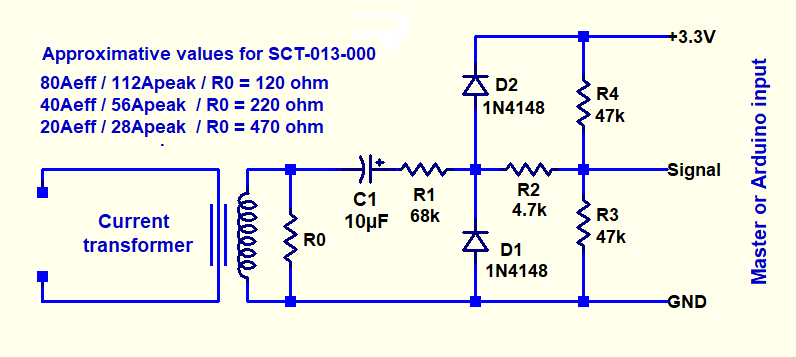
– – – –
Download del progetto dei circuito stampati in formato Eagle, con immagini e schemi elettrici
Adapter_ACmeter.zip
– – – –
Download dei file di documentazione (aggiornati il 2 dicembre 2018)
Theremino_PowerMeter_Help_ITA.pdf
Theremino_PowerMeter_Help_ENG.pdf
Download dei documenti originali, in formato ODT, per i traduttori (aggiornati il 2 dicembre 2018)
Theremino_PowerMeter_Original_Docs.zip
– – – –
Download del firmware per Arduino
Theremino_PowerMeter_ArduinoFirmware.zip
– – – –
Downloads di Theremino_PowerMeter – Versione 1.0
Theremino_PowerMeter_V1.0
Theremino_PowerMeter_V1.0_WithSources
Per tutti i sistemi Windows a 32 e 64 bit. Per Raspberry Pi, Linux, Android e OSX, leggere le note di installazione.
Telecomando a onde convogliate
Questo progetto può essere utile per accendere e spegnere apparecchi collegati alla rete elettrica, ad esempio pompe dell’acqua, sistemi di illuminazione, sistemi di irrigazione o di aerazione per una serra, ecc..
Quando non è possibile aggiungere fili agli impianti preesistenti basta disporre di una presa di corrente per il trasmettitore e una per il ricevitore.
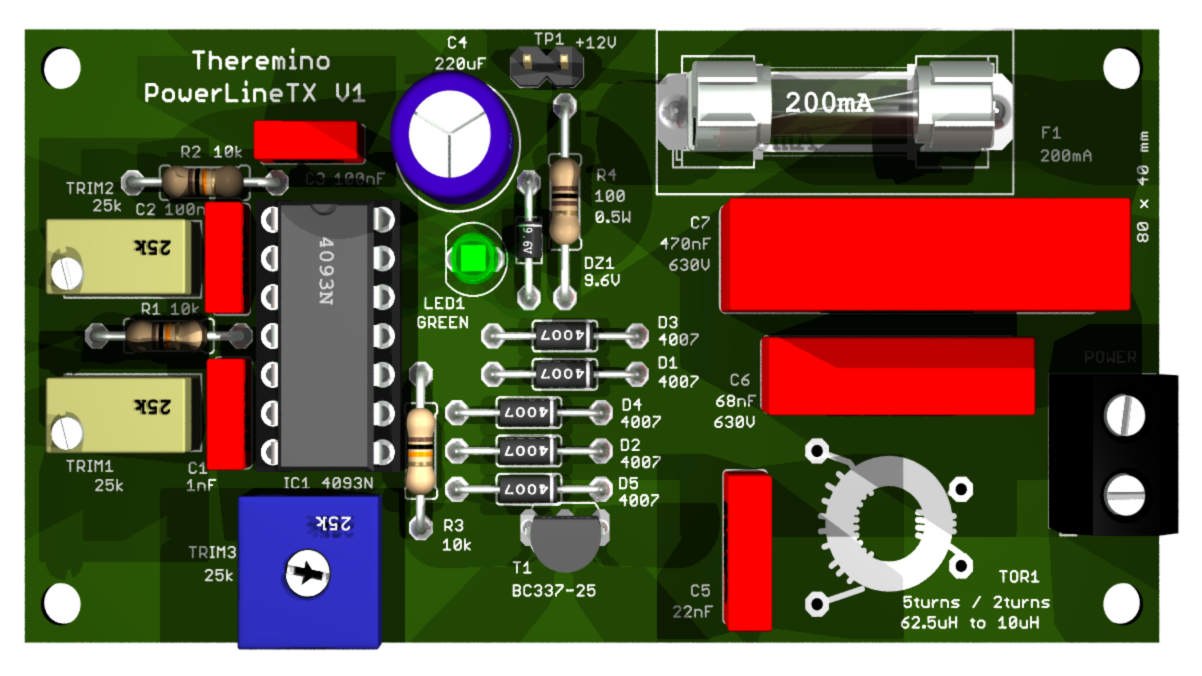
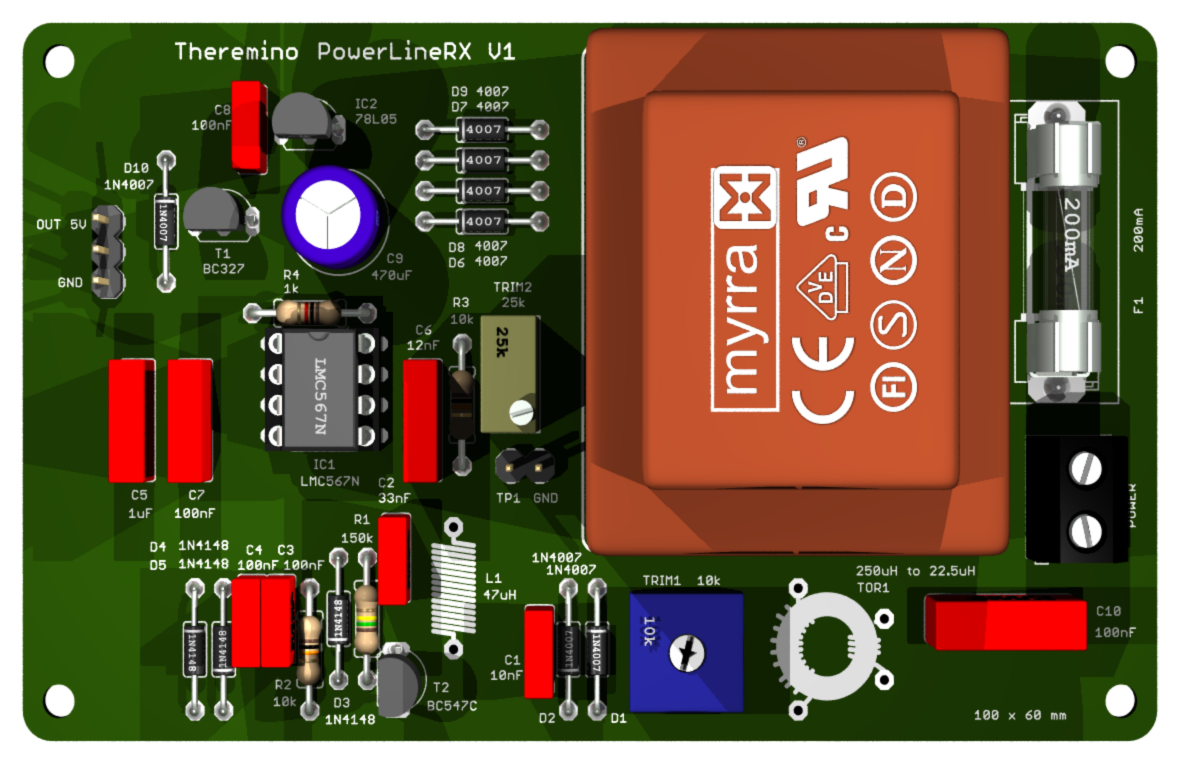
La distanza di trasmissione può essere di molte centinaia di metri (o anche chilometri se si regolano bene i due moduli) e non viene influenzata dalla presenza di muri, alberi o pioggia, come invece succederebbe con i telecomandi via radio e WiFi.
Però il trasmettitore e il ricevitore devono essere collegati alla stessa sezione di impianto elettrico. In pratica si deve controllare che tra i due non ci siano magneto-termici, differenziali o contatori.
Se necessario si possono utilizzare più sistemi indipendenti nella stessa sezione di impianto elettrico. Regolando gli oscillatori di modulazione su frequenze diverse si può ottenere che non interferiscano uno con l’altro.
UTILIZZARE SISTEMI INDIPENDENTI
Se il sistema è uno solo regolatelo a 1500 Hz. Se sono più di uno andranno regolati con frequenze diverse almeno del 30% uno dall’altro. Nel caso più comune, quando i sistemi sono al massimo due o tre, consigliamo di spaziarli del 50% e utilizzare le frequenze di: 1000, 1500 e 2200 Hz.
E’ bene ricordare anche che i trasmettitori non devono trasmettere tutti insieme. Non abbiamo provato a farlo ma quasi certamente non si riceve più niente (se qualcuno avrà il tempo di provare ci faccia sapere se funzionano anche contemporaneamente). In ogni caso i trasmettitori vanno utilizzati con un pulsante, quindi per brevi istanti, e volendo tenere acceso qualcosa a lungo si utilizzerà un relè passo passo, che al primo impulso accende e al secondo spegne.
AUMENTARE IL NUMERO DI SISTEMI
Se necessario si potrebbe anche arrivare a una decina di sistemi indipendenti utilizzando, ad esempio, le seguenti frequenze: 450, 600, 800, 1000, 1300, 1700, 2200, 2800, 3600, 4600 Hz.
Per evitare interferenze le frequenze devono essere distanti almeno del 30% una dall’altra e bisognerà anche tarare con buona precisione tutti gli oscillatori, sia dei trasmettitori che dei ricevitori.
Per ottenere le frequenze più basse (sotto i 1000 Hz), e più alte (sopra i 2200 Hz), si dovranno anche sostituire i condensatori C2 sul trasmettitore e C6 sul ricevitore. La capacità di questi due condensatori dovrà essere raddoppiata per poter regolare i trimmer sulle frequenze basse, oppure dovrà essere dimezzata per regolarli sulle frequenze alte. E ricordate che questi condensatori devono essere stabili con la temperatura, quindi non ceramici ma in poliestere o mylar.
Noi però sconsigliamo di comporre impianti così complessi, sia per la quantità di componenti necessari, sia per la difficoltà di tarare con precisione così tanti trasmettitori e ricevitori. Converrebbe piuttosto utilizzare un mini PC nella postazione remota e comunicare i dati via rete WiFi, tramite la nostra applicazione SlotsOverNet. Oppure si potrebbe utilizzare la nostra applicazione IotHAL e un modulo ESP32. Con queste tecniche si avrebbe il vantaggio di poter comunicare un gran numero di canali indipendenti, anche nelle due direzioni e anche analogici (ADC e PWM).
PRECAUZIONI PER LA SICUREZZA
Prima di proseguire è importante che vi rendiate conto che questo è un progetto difficile e pericoloso.
PROSEGUITE CON QUESTO PROGETTO
SOLO SE CONOSCETE BENE L’ELETTRONICA
ALCUNI ERRORI, O DISATTENZIONI,
POSSONO ESSERE MOLTO PERICOLOSI
Per effettuare le tarature si deve disporre di un oscilloscopio e di un alimentatore da banco regolabile.
Il trasmettitore è collegato alla tensione di rete senza isolamento, bisognerà dunque chiuderlo in un contenitore isolante ed evitare di toccarlo con le mani quando è collegato alla rete elettrica.
Le tarature del trasmettitore andranno fatte alimentandolo provvisoriamente con un alimentatore da banco regolato a 11 volt. Non collegate l’oscilloscopio al trasmettitore quando è collegato alla rete!!!
Il ricevitore ha un trasformatore di isolamento, ma la parte destra del circuito stampato è collegata alla rete e toccarla può essere molto pericoloso.
I rischi non sono solo quelli relativi al toccare con le mani i circuiti collegati alla rete elettrica, ma anche la possibilità che vi “scappi il cacciavite” e faccia un cortocircuito esplosivo, con proiezione di scintille e metallo fuso.
Proseguite solo se avete l’esperienza necessaria e sapete esattamente cosa state facendo.
Ora siete avvertiti per cui decliniamo ogni responsabilità.
IL TRASMETTITORE
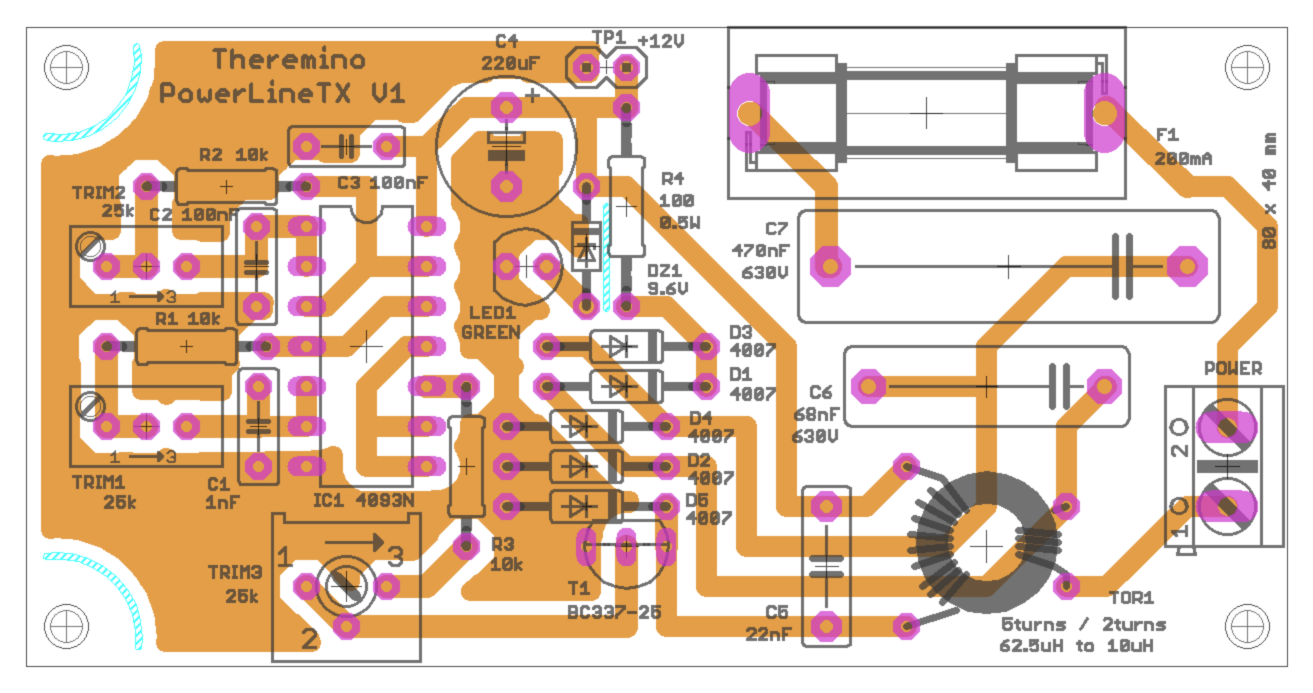

Il trasmettitore invia alla rete elettrica un segnale a 130 kHz della ampiezza di alcuni volt. Questo segnale viene anche modulato, con una frequenza di circa 1 o 2 kHz, in modo da poterlo riconoscere e distinguere dai numerosi disturbi sempre presenti sulle reti elettriche.
Per ridurre le dimensioni e il numero di componenti, il trasmettitore non ha un trasformatore di alimentazione ma è direttamente collegato alla rete. Per cui lo si dovrà chiudere in un contenitore di plastica da cui escono solo i due fili isolati che vanno alla rete elettrica.
Per accendere il trasmettitore si dovrà aggiungere un pulsante manuale (tipo campanello) in serie a uno dei due fili che vanno alla rete.
Nel caso si volesse comandare il telecomando con un segnale digitale (proveniente ad esempio da un Modulo Master collegato in USB al computer) si dovrà assicurare un buon isolamento, per cui al posto del pulsante manuale useremo un relè meccanico oppure un OptoRele.
In quest’ultimo caso fate attenzione che gli OptoRele non tengono la tensione di rete, per cui si dovrà sostituire il PhotoMOS con un PhotoTRIAC. Nella pagina degli OptoRele c’è una tabella con quattro modelli di PhotoTRIAC, consigliamo di usare uno dei primi tre, cioè un MOC3043M, un MOC3063M oppure un MOC3083M.
Componenti del trasmettitore
- La sezione IC1B dell’integrato IC1 oscilla a 130 kHz (regolabile con il TRIM1)
- La sezione IC1A oscilla a bassa frequenza, solitamente intorno a 1.5 kHz (regolabile con il TRIM2)
- La sezione IC1D miscela i due oscillatori e quindi modula la portante a 130 kHz con 1.5 kHz
- La sezione IC1C invia il segnale miscelato verso il transistor T1
- Il trimmer TRIM3 regola la quantità di segnale inviata a T1 e quindi la potenza inviata alla rete elettrica.
- Il transistor T1 amplifica la corrente e pilota il trasformatore di isolamento TOR1
- Il circuito oscillante composto da C5 e il primario di TOR1 (62.5uH), accordato a 130 Khz, trasforma la corrente ad onda quadra prodotta dal transistor in un segnale quasi sinusoidale. Per cui il segnale inviato alla rete elettrica è un 130 kHz quasi puro, che non contiene armoniche ad alta frequenza.
- Il secondario di TOR1 ha una bassa impedenza (10 uH) per ottenere un buon accoppiamento con la bassa impedenza dell’impianto elettrico (normalmente dai 15 ai 50 ohm).
- Il segnale inviato all’impianto elettrico attraverso C6 e C7 ha una ampiezza di alcuni volt, sufficiente a coprire distanze molto grandi.
La sezione dell’alimentatore
- Alla frequenza di rete (50 Hz) il condensatore C7 ha una reattanza di circa 7000 ohm e quindi limita la corrente di alimentazione a non più di 30 mA.
- La corrente di alimentazione viene raddrizzata dai diodi D1, D2, D3 e D4.
- Il resistore R4 limita la corrente durante i rapidi transitori di accensione e in caso di extratensioni ad alta frequenza proveniente dalla rete.
- La corrente raddrizzata e limitata mantiene carichi i condensatori C3 e C4 che alimentano l’integrato IC1 e il circuito composto da TOR1 e T1.
- Il diodo zener DZ1, con in serie il LED1 da circa 2.5 volt, limitano la tensione a circa 12 volt.
- Il LED1 aiuta a regolare il trimmer TRIM3.
- Se si regola TRIM3 troppo alto si invia troppa potenza di segnale alla rete, l’alimentatore non riesce più a fornire i 12 volt e il LED si spegne.
- Se si regola TRIM3 troppo basso si invia poca potenza di segnale alla rete e quindi tutta la corrente va sul LED che si accende alla massima luminosità.
- Quindi si deve regolare TRIM3 in modo che il LED si accenda debolmente. Questa taratura va fatta con il trasmettitore collegato alla rete, quindi fate MOLTA ATTENZIONE. Fatela con il circuito nella sua scatola isolante, attraverso un foro preciso che permetta al cacciavite di andare solo sul trimmer.
Il componente TOR1
Se si riescono ad avere toroidi con AL da circa 2.5 o 3, nell’avvolgimento di sinistra si avvolgono 5 spire e in quello di destra (che e va verso la rete elettrica) si avvolgono 2 spire.
Per ulteriori informazioni su come costruire questi trasformatori leggere la sezione “Costruire i trasformatori toroidali” che si trova verso la fine di questo articolo.
Taratura del trasmettitore
DURANTE LA TARATURA IL CIRCUITO SARA’ FUORI DAL CONTENITORE ISOLANTE
LO TOCCHEREMO CON LE MANI E SARA’ COLLEGATO ALL’OSCILLOSCOPIO
QUINDI
NON COLLEGATE IL TRASMETTITORE ALLA RETE ELETTRICA!!!
Per alimentare il trasmettitore durante la taratura si deve regolare un alimentatore stabilizzato da banco a 11 volt e poi collegarlo al TP1. Il negativo dell’alimentatore va collegato sul lato sinistro del TP1 (che va a massa) e il positivo sul lato destro (con la scritta +12V).
L’alimentatore DEVE essere da 11 volt, fino a un massimo di 11.5 volt. L’alimentatore NON deve essere da 12 volt, e nemmeno da 13 volt o superiore, perché altrimenti lo Zener e il LED cercherebbero di stabilizzare la tensione e si sforzerebbero fino a bruciarsi.
- Collegare l’oscilloscopio (o il frequenzimetro) al Pin 4 di IC1 (se viene più comodo si può collegarlo a R1 dal lato più vicino a IC1).
- Regolare TRIM1 fino ad ottenere una frequenza di 130 kHz.
- Collegare l’oscilloscopio (o il frequenzimetro) al Pin 3 di IC1 (se viene più comodo si può collegarlo a R2 dal lato più vicino a IC1).
- Regolare TRIM2 fino ad ottenere una frequenza di 1500 Hz (o una delle frequenze listate nella sezione iniziale di questo articolo, che spiega come utilizzare più sistemi indipendenti).
Adesso si devono scollegare l’alimentatore e l’oscilloscopio e mettere il circuito in una scatola isolante perché la taratura finale la si dovrà fare con la rete elettrica collegata.
Controllare ancora di aver scollegato l’oscilloscopio e l’alimentatore e che il circuito sia completamente inserito nella scatola isolante, con solo un piccolo foro in corrispondenza esatta del trimmer TRIM3 e un secondo foro per vedere il LED1.
- Collegare i punti POWER-1 e POWER-2 con un cavo di alimentazione e una spina alla rete elettrica.
- Ruotare il trimmer TRIM3 fino a che il LED si spegne e poi tornare un po’ indietro fino a che il LED si riaccende debolmente.
La taratura del trasmettitore è finita.
IL RICEVITORE


Il ricevitore è sintonizzato sulla frequenza di 130 kHz (con C2 e L1) e in questo modo vengono eliminati gran parte dei disturbi. La eliminazione completa dei disturbi rimanenti viene poi effettuata da un decodificatore di frequenza (IC1), accordato sulla stessa frequenza di modulazione del trasmettitore (solitamente da 1 a 2 KHz). Il decodificatore permette anche di appaiare ogni ricevitore con il suo trasmettitore e quindi di avere più telecomandi sulla stessa rete che non si disturbano uno con l’altro.
Componenti del ricevitore
- Nella parte superiore dello schema il regolatore IC2 stabilizza la tensione di 5 volt che alimenta T2 e IC1.
- La alimentazione viene prelevata dalla rete elettrica per mezzo di un trasformatore da 6 o 9 volt e poi raddrizzata dai diodi D6, D7, D8 e D9.
- Se il trasformatore è da 9 volt si possono usare dei diodi comuni, ad esempio dei 4002, 4003 … fino a 4007.
- Se il trasformatore è da 6 volt allora i diodi dovrebbero essere a bassa caduta di tensione, quindi degli Schottky, ad esempio degli 1N5819.
- Il condensatore C10 e il toroide TOR1 prelevano dalla rete le frequenze alte e quindi il segnale a 130 Khz in arrivo dal trasmettitore.
- Il trimmer TRIM1 regola la sensibilità. Di solito lo si regolerà al massimo ma può essere utile abbassarlo durante le prove per simulare una grande attenuazione sulla linea e perfezionare la taratura della frequenza di ricezione. In qualche raro caso, se la rete contiene disturbi così forti da innescare il ricevitore anche senza segnale del trasmettitore, si potrebbe abbassarlo un po’ per eliminare questi disturbi.
- I diodi D1 e D2 effettuano una prima limitazione in caso di segnali molto forti e nel contempo proteggono i componenti successivi in caso di fulmini.
- L’amplificatore composto da C1, T2, R1, C2 e L1 è accordato sulla frequenza della portante del trasmettitore (130 kHz +/-5 kHz), la amplifica di una trentina di volte e elimina gran parte dei disturbi alle frequenze basse e alte.
- I componenti D3, C3, R2 e C4 estraggono la modulazione a bassa frequenza dalla portante a 130 Khz.
- I diodi D4 e D5 limitano il segnale a bassa frequenza tra +0.6 e -0.6 volt in modo da non sovraccaricare IC1 che accetta un massimo di due volt picco picco.
- IC1 decodifica la frequenza in arrivo. Se la frequenza ricevuta corrisponde a quella regolata con TRIM2 entro il +/- 15%, allora IC1 abbassa il Pin 8 di uscita e mette in conduzione il transistor T1.
- Il transistor T1 fornisce in uscita una corrente sufficiente a comandare un piccolo relè da 5 volt. Nel caso si volesse un segnale logico si dovrà aggiungere un resistore da 1 a 10k verso massa.
- Il diodo D10 protegge il transistor dalle extra-tensioni di ritorno provocate dalle bobine dei relè.
Il componente TOR1
Se si riescono ad avere toroidi con AL da circa 2.5 o 3, nell’avvolgimento di sinistra si avvolgono 10 spire e in quello di destra (che e va verso la rete elettrica) si avvolgono 3 spire.
Per ulteriori informazioni su come costruire questi trasformatori leggere la sezione “Costruire i trasformatori toroidali” che si trova verso la fine di questo articolo.
Taratura del ricevitore
Prima di tutto si collega il ricevitore alla rete elettrica. Tutta la parte sinistra del ricevitore è isolata ma si deve fare attenzione che la parte destra è collegata alla rete, quindi non toccatela con le mani e non appoggiate il circuito su superfici metalliche.
Poi si collega anche il trasmettitore (già tarato) alla rete elettrica. Lo si collega in modo che sia sempre acceso, quindi se c’è un pulsante manuale lo si deve saltare.
- Regolare il TRIM2 fino a che il segnale del ricevitore viene riconosciuto.
- Abbassare TRIM1 in modo da rendere difficile la ricezione e regolare nuovamente TRIM2.
- Ripetere i punti precedenti fino a riuscire a ricevere anche con TRIM2 regolato quasi al minimo.
- In alternativa è possibile collegare un oscilloscopio (o un frequenzimetro) al TP1 e regolare la frequenza di oscillazione al doppio di quella di trasmissione. Cioè nel caso che il trasmettitore sia regolato a 1500 Hz, si dovrà regolare TRIM2 per ottenere 3000 Hz.
COSTRUIRE I DUE TRASFORMATORI TOROIDALI
Quando si cercano i toroidi su eBay controllare che siano di circa 14 mm di diametro esterno (minimo intorno ai 12 mm e massimo intorno ai 20 mm).

Se i toroidi sono troppo piccoli sarà difficile avvolgere le spire e non si riuscirà a mantenere ben separati i due avvolgimenti. Se invece sono troppo grandi sarà difficile farli stare sullo stampato. In tutti i casi non li si dovrà posizionare come disegnati sui circuiti stampati, ma in verticale. Se il filo utilizzato è rigido i torodi staranno al loro posto facilmente, altrimenti li si può fissare con la colla a caldo.
Il filo per gli avvolgimenti deve essere isolato, quello rosso e nero degli impianti telefonici va molto bene ma si può utilizzare qualunque tipo di filo isolato, sia con l’interno rigido che multifilare. Il filo deve essere ben isolato, ma abbastanza piccolo da poterlo avvolgere mantenendo ben separati i due avvolgimenti.
Non utilizzate filo di rame smaltato, lo smalto potrebbe essere graffiato o crepato e comunque è troppo sottile per dare la totale sicurezza di cui abbiamo bisogno.
Bisogna procurarsi dei toroidi con K (uH/spira) da circa 1 fino a 6, ma è meglio se li si trova con un K di circa 2.5, così si potranno usare i numeri di spire indicati negli schemi e non le si dovranno ricalcolare.
Il valore K indica quanti uH si ottengono avvolgendo una singola spira su quel determinato tipo di toroide. Attenzione che alcuni costruttori danno il valore in AL che è diverso dal K di mille volte, cioè invece dei micro-Henry danno i nano-Henry per spira.
In genere i toroidi di colore verde e di diametro esterno tra i 12 e i 16 mm, dovrebbero avere un K adatto al nostro uso. Ma purtroppo i costruttori non hanno uno standard di colori sicuro e i venditori non pubblicano i valori di uH per spira.
Se il venditore non indica il valore di uH per spira acquistarli è un azzardo, un po’ come comprare “cibo” senza sapere se sono funghi, pomodori o cavallette. Esistono toroidi con K bassissimi, anche inferiori a 0.1 e in tal caso si dovrebbero avvolgere centinaia di spire, che non potrebbero proprio starci, nemmeno utilizzando un filo esageratamente piccolo.
CALCOLARE I VALORI DI K e AL
 Se il venditore pubblica una foto con alcune spire sul toroide e indica l’impedenza, allora è possibile risalire al valore di uH per spira, contando le spire e calcolandoli con la formula seguente:
Se il venditore pubblica una foto con alcune spire sul toroide e indica l’impedenza, allora è possibile risalire al valore di uH per spira, contando le spire e calcolandoli con la formula seguente:
- K = Impedenza totale in uH / (N * N)
- (dove N è il numero di spire)
Se ad esempio la foto mostrasse un toroide con 10 spire, e il venditore scrivesse che è da 300 uH, faremmo il calcolo: 300 / (10 * 10), quindi 300 / 100, e quindi si otterrebbe K = 3 (e quindi AL = 3000)
CALCOLARE IL NUMERO DI SPIRE
Una volta che si conosce il valore di K si calcola il numero di spire con la seguente formula:
- NUMERO SPIRE = Radice quadrata di (Impedenza in uH da ottenere / K)
- (e infine si approssima il numero di spire all’intero più vicino)
Ecco una tabella con i numeri di spire per K che va da 1 a 6
| K (uH/sp) |
AL (nH/sp) |
Trasmettitore 62.5 uH |
Trasmettitore 10 uH |
Ricevitore 250 uH |
Ricevitore 22.5 uH |
| 1 | 1000 | 8 spire | 3 spire | 16 spire | 5 spire |
| 1.5 | 1500 | 7 spire | 3 spire | 13 spire | 4 spire |
| 2 | 2000 | 6 spire | 2 spire | 11 spire | 4 spire |
| 2.5 | 2500 | 5 spire | 2 spire | 10 spire | 3 spire |
| 3 | 3000 | 5 spire | 2 spire | 9 spire | 3 spire |
| 3.5 | 3500 | 4 spire | 2 spire | 9 spire | 3 spire |
| 4 | 4000 | 4 spire | 2 spire | 8 spire | 3 spire |
| 4.5 | 4500 | 4 spire | 1 spira | 8 spire | 3 spire |
| 5 | 5000 | 4 spire | 1 spira | 7 spire | 2 spire |
| 5.5 | 5500 | 3 spire | 1 spira | 7 spire | 2 spire |
| da 6 a 9 | 6000 | 2 spire | 1 spira | 6 spire | 2 spire |
ACQUISTARE I TOROIDI
Dato che i venditori non pubblicano dati precisi dei toroidi, ne abbiamo acquistati una decina di modelli, per misurare le loro caratteristiche e potervi consigliare quali prendere. Nella lista seguente riportiamo i più adatti per questo progetto. Le misure in millimetri si riferiscono al solo toroide, senza avvolgimenti.
- 20 pezzi da 14 x 6 mm, con K = 8 (circa) per circa 5 Euro.
- 10 pezzi da 14 x 6 mm, con K = 8 (circa) per circa 3 Euro.
- 10 pezzi da 14 x 5.3 mm, con K = 5.5 (circa) per circa 10 Euro.
- 10 pezzi da 12 x 6 mm, con K = 3.5 (circa) per circa 10 Euro.
- 10 pezzi da 10 x 5.3 mm, con K = 6 (circa) per circa 9 Euro.
Alcuni di questi toroidi hanno già uno o due avvolgimenti, dovrete svolgerli e rifarli con filo piccolo e rigido ricoperto con un buon isolante in plastica o teflon. Se invece deciderete di utilizzare del filo smaltato (ad esempio quello recuperato dai toroidi acquistati) fate molta attenzione che i due avvolgimenti siano ben separati.
In tutti i casi fate in modo che il filo di un avvolgimento non si avvicini mai a quello dell’altro, in nessun punto, per meno di tre millimetri. Questo serve per garantire con assoluta sicurezza che le extra-tensioni della rete elettrica (magari in caso di fulmini), non si trasferiscano sulle parti a bassa tensione, che in alcuni casi potrebbero anche essere collegate al computer o toccate con le mani.
Le ultime (da 12 x 6 mm) sono un po’ piccole, abbastanza costose e con un K di 3.5 che richiede più spire. Potete comunque usarle se trovate un buon filo che sia bene isolato ma piccolo. E il risultato sarebbe anche più piccolo e più facile da far stare e incollare sul circuito stampato.
Naturalmente questi link non dureranno per sempre per cui vi diamo anche i link ai negozi dei venditori, i quali in futuro potrebbero avere altri modelli simili.
Lo abbiamo già scritto ma è bene ricordare che i toroidi di colore verde e di diametro esterno tra i 12 e i 20 mm, dovrebbero avere un K adatto al nostro uso. E in genere quelli da 10 mm dovrebbero avere un K intorno a 2, quelli da 12 mm un K di circa 3.5, quelli da 14 mm un K di circa 8 e quelli più grandi anche fino a dieci e oltre.
Non è necessario ottenere una impedenza precisa per cui potreste cavarvela anche solo considerando il colore e le dimensioni. Ma volendo stare più sicuri utilizzate solo quelli di cui diamo le caratteristiche oppure misurateli.
DOWNLOAD DEI CIRCUITI STAMPATI, IMMAGINI E SCHEMI
Progetti completi in formato Eagle, immagini 3D, schemi e data-sheets dei componenti:
Actuator_PowerLine_V1.zip