
Theremino NDVI
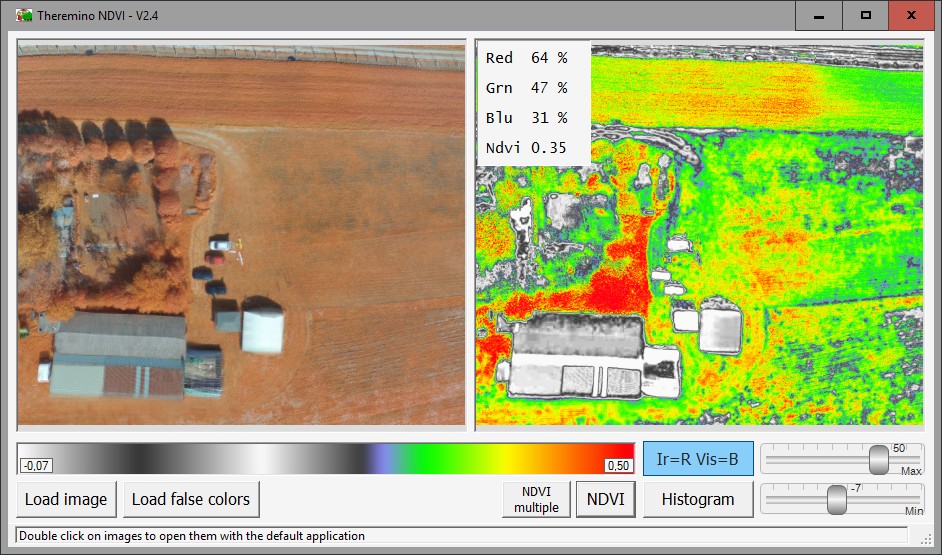 Images NDVI (Indice de végétation différence normalisée), afficher la santé de la végétation à une échelle de fausses couleurs. Végétation saine reflète plus de végétation sèche infrarouge ou de malades. Pourquoi vous utilisez une caméra modifiée et puis vous traitez les images avec l’application Theremino NDVI.
Images NDVI (Indice de végétation différence normalisée), afficher la santé de la végétation à une échelle de fausses couleurs. Végétation saine reflète plus de végétation sèche infrarouge ou de malades. Pourquoi vous utilisez une caméra modifiée et puis vous traitez les images avec l’application Theremino NDVI.
Il y a aussi des applications commerciales qui effectuent cette conversion, mais ils sont coûteux et complexe. Vous pourriez également utiliser Infragram, mais il est uniquement utilisable sur le Web et inflexible.
Modifier un appareil photo
Certains appareils sont plus adaptés que d’autres, mais en général peuvent s’adapter à tous les appareils numériques de l’entreprise. L ’ l’opération plus difficile est d’enlever le filtre infrarouge, située à l’intérieur de ’ but. Ensuite, vous ajoutez un filtre bleu devant la caméra, ou à l’intérieur, et la transformation est terminée.
J’ai l’habitude d’utiliser un filtre bleu qui laisse même infrarouge et vous obtenez des images qui contiennent des infra-rouge et bleu. Infrarouge sont stockés dans le canal rouge, le bleu dans le canal bleu et le vert n’est pas utilisé.
Selon nos tests, un bon filtre est sur “Rosco nuit bleu # 74”, C’est une gelée de filtre pas cher et a une bonne réponse. Mais il existe de nombreux autres filtres, Certains ont même très cher. Certains auteurs préfèrent les filtres rouges.
Les détails de ces changements sont présentés dans de nombreux articles dans Internet. Recherche “Salle de NDVI”, “Filtres infrablue”, “Rosco infrarouge”, “Filtres NDVI” etc.…
Les liens suivants sont des exemples, Parmi les nombreux sites sur les caméras
http://diydrones.com/profiles/blogs/photosynthesis-assessments
http://www.instructables.com/id/Turn-to-Canon-camera-into-a-Plant-Health-Analyzer-u
https://publiclab.org/notes/cfastie/04-26-2014/mobius-ndvi
Ce sont des sites qui parlent de filtres
https://www.rosco.com/filters/supergel.cfm
http://purposefulscience.blogspot.it/2014/09/comparing-rosco-infrablue-filters-2007.html
https://publiclab.org/notes/nedhorning/10-30-2013/red-vs-blue-filters-for-ndvi
https://publiclab.org/notes/nedhorning/11-01-2013/why-a-red-filter-should-work-well-for-ndvi
Et sur ce site, vous pouvez trouver beaucoup d'informations utiles sur les drones:
https://hobbyhelp.com/drones
Caractéristiques du NDVI Theremino
- Avec les options Min et Max s’adapte l’opération même pour les images avec la balance des blancs incorrecte ou prise dans des conditions d’éclairage non optimale.
- La fonction “Histogramme” vous aide à trouver la meilleure configuration.
- En double cliquant sur le ’ histogramme s’ajustent automatiquement Min et Max.
- En double cliquant sur les images que vous envoyez au programme image par défaut.
- Avec bouton “NDVI multiples” Vous pouvez traiter toutes les images dans un dossier et ses sous-dossiers.
- Avec la touche de couleur, vous pouvez utiliser les deux filtres bleus classiques, Filtres rouges.
- Choisir entre une douzaine fausses couleurs écailles, Vous pouvez améliorer les meilleures caractéristiques de la végétation.
- Vous pouvez créer de nouvelles images de fausses couleurs avec n’importe quel logiciel de montage (comme la peinture). Images en fausses couleurs doivent se trouver dans le dossier “FalseColors_Scales” et ils sont normalement PNG de 256 x 32 pixels (Theremino NDVI les accepte dans d’autres formats).
Notes de versions
Version 1.5: Première version publiée.
Version 1.6: Correction d’une erreur dans la conversion de NDVI avec largeur d’image autre qu’un multiple de quatre. Corriger le TrackBar à travailler même avec la nouvelle souris, avec molette micrométrique (sans coups).
Version 2.4: L ajouté ’ histogramme et nombreuses autres fonctions. Lire le “Caractéristiques” au-dessus de.
Version 2.5: Maintenant, les images sont converties en 24 pas un multiple de type bit avec taille horizontale 4.
Télécharger Theremino NDVI – Version 2.5
Theremino_NDVI_V 2.5
2.4 Theremino_NDVI_V _WithSources (design complet pour les programmeurs)
Version pour toutes les fenêtres 32 et 64 bit. Pour Pi framboise, Linux, Android et OSX, lire le notes d'installation.
Pilote de drone Theremino Log (Journal pilote UAV)
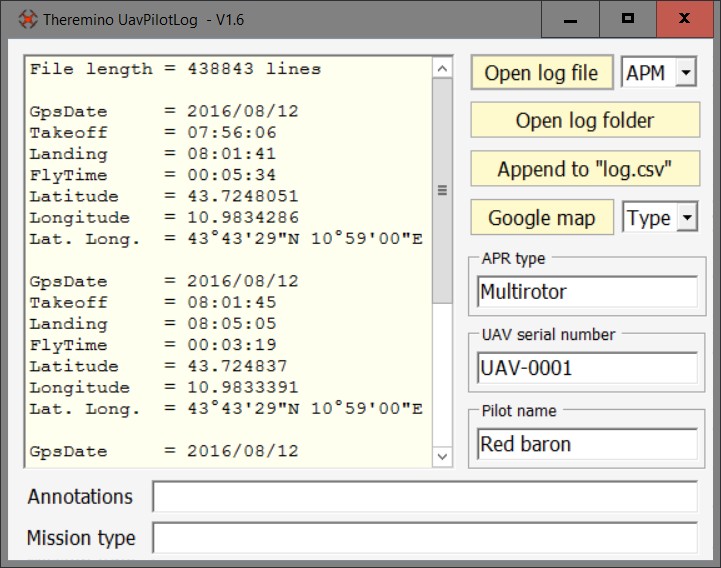
Journaux de l’UAV (Véhicules aériens sans pilote) sont long et complexe de fichier. Ces fichiers sont produits par Logiciels libres DroneCode ou d’autres logiciels commerciaux. Quelques lignes du journal, disséminés parmi des milliers d’autres informations, contiennent les données que le pilote professionnel doit copier dans son “Journal de bord” Après chaque vol. Faire cela manuellement est difficile et lent car certaines données sont codées et presque impossible à lire pour un être humain.
Avec l’application Theremino UavPilotLog mise à jour le pilote personnel Loogbook devient une opération rapide et simple.
Les données qui sont extrait et ajoutées au personnel du journal de bord sont:
- Jour, mois, année
- Type de drone
- Numéro de série
- Coordonnées du décollage
- Heure de départ
- Coordonnées de l’atterrissage
- Moment de l’atterrissage
- Nom du pilote
- Annotations
- Type de mission
- Minutes et secondes de vol
Si le journal contient plusieurs vols sont ajoutés plusieurs lignes pour le journal de bord.
Cartes
Avec un clic de la souris, vous pouvez également afficher l’emplacement sur Google Maps ou Google Earth. Si le journal contient plus de vols, vous pouvez choisir les coordonnées en cliquant avec la souris sur les lignes de Latitude et Longitude de chaque vol.


Versions et téléchargements
Notes de versions
Version 1.6: Première version publiée.
Télécharger Theremino UavPilotLog – Version 1.6
Theremino_UavPilotLog_V 1.6
Theremino_UavPilotLog_V 1.6 _WithSources (design complet pour les programmeurs)
Version pour toutes les fenêtres 32 et 64 bit. Pour Pi framboise, Linux, Android et OSX, lire le notes d'installation.