
Theremino Automation Language
Più semplice del Basic, più facile di Theremino Script. Pur essendo: “il linguaggio di programmazione più semplice, nell’universo conosciuto“, è anche abbastanza potente. Con due o tre parole, si ottengono risultati che altrimenti, richiederebbero pagine di codice.
Dalla versione 2.7 si possono anche associare i tasti,
ad esempio si può aprire un sito web con un tasto o lanciare un video con un’altro.
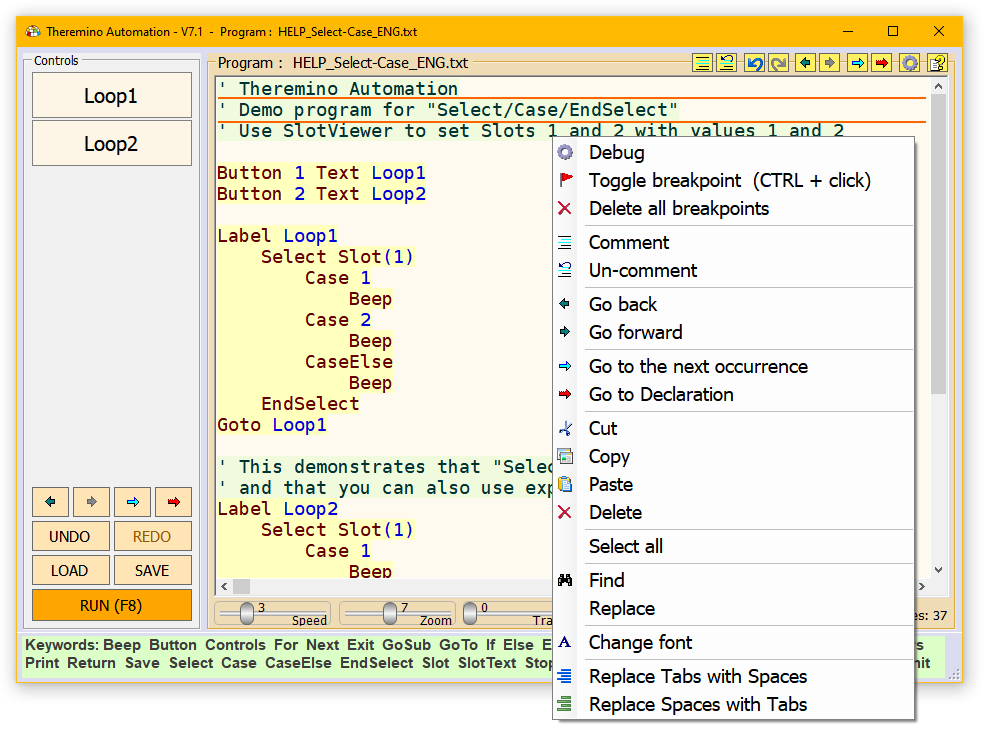
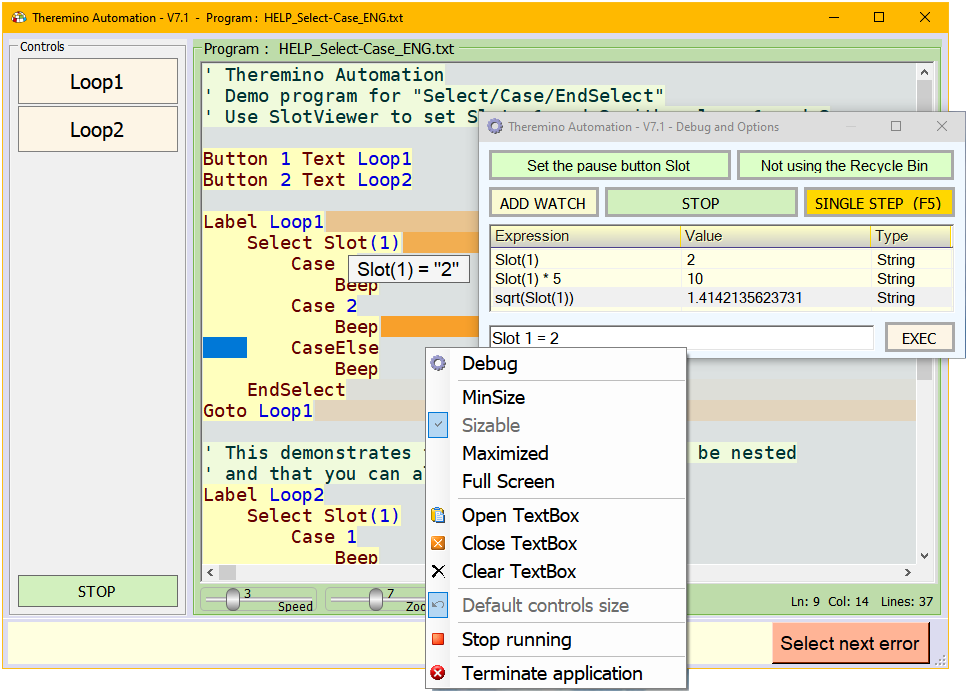
Dalla versione 4.x esistono anche i Breakpoints, i Watches, la “Esecuzione passo passo”
e altre nuove istruzioni (tra cui il Select Case e le istruzioni per andare a tutto schermo.
La versione 4.x rappresenta un notevole miglioramento per questa applicazione.
Leggete la documentazione per conoscere tutte le novità.
Finalmente c’è la anche documentazione in formato PDF, scaricatela da questa pagina.
Con la versione 5.x abbiamo introdotto anche le variabili con nomi dati dall’utente.
Ci sono anche i cicli FOR e un gran numero di nuove funzioni e di miglioramenti.
La qualità dell’editor in alcune aree (coloramento degli errori)
è anche migliore dei più grandi editor, ad esempio VisualStudio.
Dalla versione 7 si possono utilizzare anche gli SlotText per scambiare stringhe tra applicazioni.
Ci sono numerose funzioni nuove e tutto il sistema è stato migliorato per un uso ancora più comodo.
La versione 7.1 contiene grandiosi miglioramenti – scaricatela !
Automation sta diventando un vero linguaggio di programmazione,
ma resta semplice e facile da utilizzare
anche per chi non è un programmatore professionista.
– – – – – –
Potendo leggere e scrivere gli Slot, si possono accendere Led, muovere Servo motori, regolare temperature e livelli. Ma si possono anche controllare altre applicazioni. Ad esempio si può indicare a Theremino ARM, quale GCode eseguire. E poi attendere, che il braccio robotico abbia completato la sua azione, prima di eseguire l’operazione successiva.
Questo non è un vero Basic. Contiene solo le funzioni per le applicazioni di automazione. Non lo complicheremo troppo, altrimenti diventerebbe soltanto, una brutta copia del Visual Basic. Chi vuole un linguaggio più potente, può usare VbNet o CSharp.
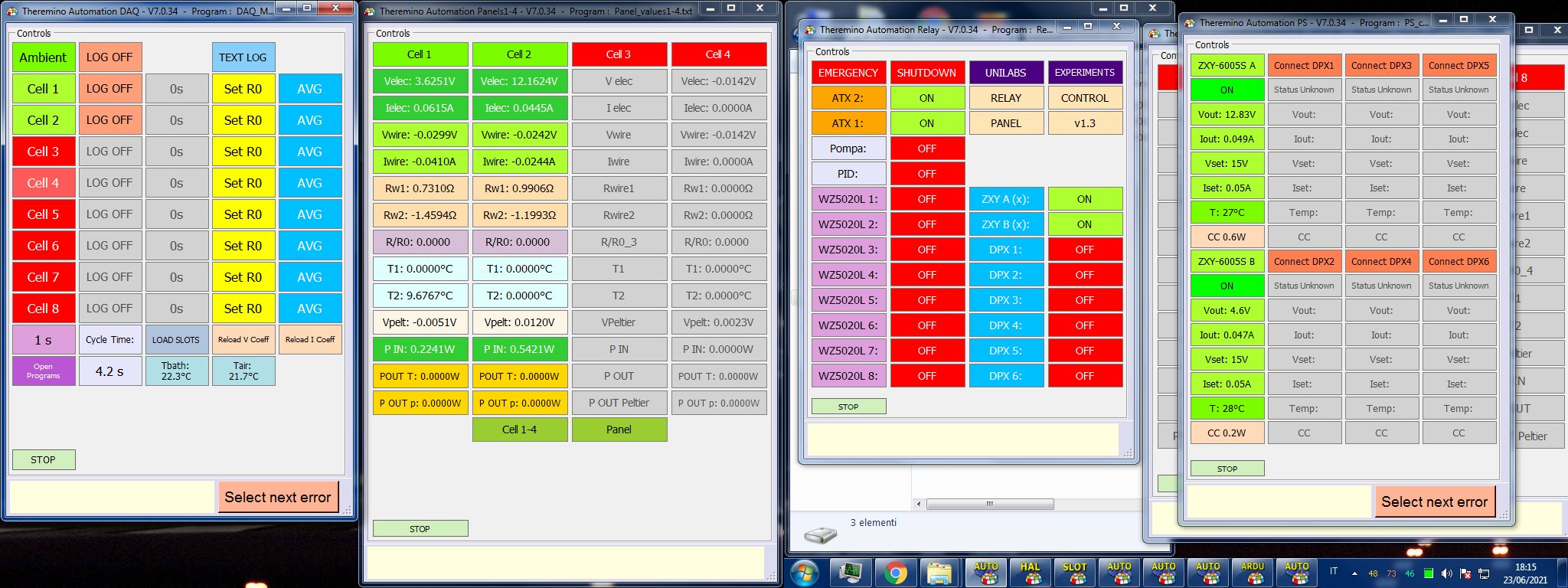
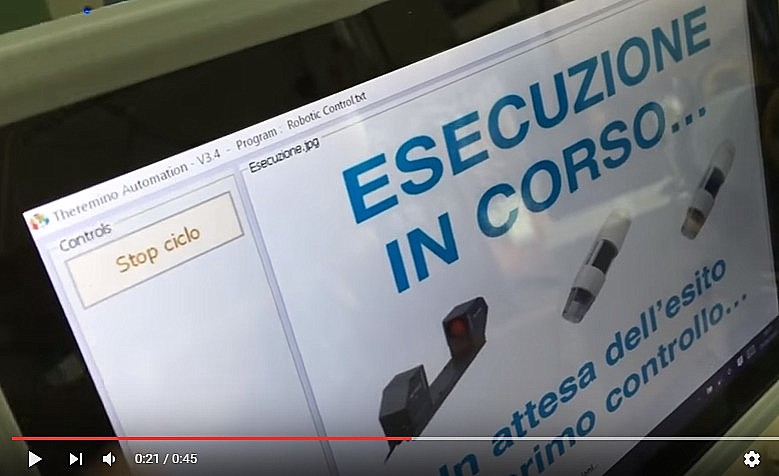
Il Theremino Automation è stato messo alla prova, in una applicazione di automazione complessa. Una intera linea di produzione in miniatura, rapistan, motori, sensori e braccio robotico guidato con i GCode. Si tratta di una applicazione, che avrebbe messo in crisi un PLC con Ladder. Con Theremino Automation è diventata facile da programmare e da usare. Il tutto viene controllato da un Tablet Windows, con i tastoni sul touch screen.
Negli ultimi anni (dal 2017) automation è stato applicato a molte macchine, sia per il controllo qualità che per la produzione, specialmente in Cina. Se avremo tempo pubblicheremo un po’ di video.
Caratteristiche:
- La riga inferiore suggerisce istruzioni dettagliate e su misura per quel che si sta scrivendo.
- Il controllo degli errori avviene direttamente nella finestra di editing con testo colorato.
- Le operazioni di editing sono fluide, anche con programmi di migliaia di righe.
- Si possono anche caricare immagini, suoni e video, per creare sinottici statici o animati.
- Per quanto il linguaggio sia interpretato l’esecuzione è velocissima. Le righe di programma vengono eseguite in circa dieci micro secondi (su macchine mediamente veloci). Sono 100 000 istruzioni al secondo!
Perché un nuovo linguaggio?
Esistono decine di linguaggi di programmazione, uno più bello dell’altro. Sono veloci, potenti e flessibili… sembra assurdo doverne scrivere uno nuovo. Ma purtroppo tutti i linguaggi (VbNet, CSharp, VB6, C++, Java, Phyton etc..) prevedono tecniche complesse e poco intuitive anche per le operazioni più semplici.
Gli utenti si aspettano, come minimo, di poter eseguire una istruzione e poter specificare un tempo di attesa, ad esempio trenta secondi, prima di eseguire la istruzione successiva. Quando provano a scriverlo, la interfaccia utente si blocca per trenta secondi, i pulsanti non rispondono più, e il programma diventa inusabile. Abbiamo provato a spiegare, che si devono usare i Thread, la “Programmazione a Eventi” e le “Macchine a Stati“, ma ci siamo accorti che sono tecniche troppo complesse, comprensibili solo a chi programma da anni.
Theremino Automation colma questa lacuna. Le operazioni di base (fare qualcosa quando avviene qualcos’altro, aspettare un certo numero di secondi, suonare un brano musicale, visualizzare un video, aprire un sito web, etc…), sono facili e intuitive.
Questa applicazione è il primo gradino, l’anello di congiunzione evolutivo, tra il bimbominkia e il Maker. Da oggi il sistema Theremino è in prima linea, nella lotta al bimbominkismo!
Applicazioni
Le prime versioni sono state sviluppate, per controllare un modello di linea di produzione con robot verniciatori in miniatura. Inizialmente si pensava di usare un linguaggio Ladder, ma purtroppo appena il progetto si complica, i Ladder diventano un groviglio di righe incomprensibile. In seguito abbiamo provato Theremino Script, ma i tecnici della officina che produce il robot, non essendo programmatori, trovavano difficile costruire la struttura di Eventi e Thread, necessaria per separare la interfaccia utente, dalla automazione vera e propria. Infine il Theremino Automation ha permesso, non solo di controllare il robot in modo semplice, ma anche di controllare la applicazione RobotArm, cambiare i GCode, controllare una ventina di sensori, servo comandi, motori in continua e relè. Tutto questo scritto in quindici giorni da non-programmatori.

Un tablet Windows controlla una intera linea di produzione in miniatura, rapistan, motori, sensori e braccio robotico. Il tutto con quattro tasti sullo schermo touch. In questi ultimi giorni, i tecnici della officina che produce il robot verniciatore, stanno completando la loro applicazione con sinottici animati (grazie alle nuove funzioni che permettono di caricare anche immagini e video).
Una dosatrice per riempire barattoli


Ringraziamo la ditta Hobbyfarm per questo bell’esempio di utilizzo del sistema theremino. Si tratta di un prototipo di dosatrice per riempire barattoli di miele.
Cliccate su questo link per vedere meglio i particolari in un video.
Una applicazione esemplare
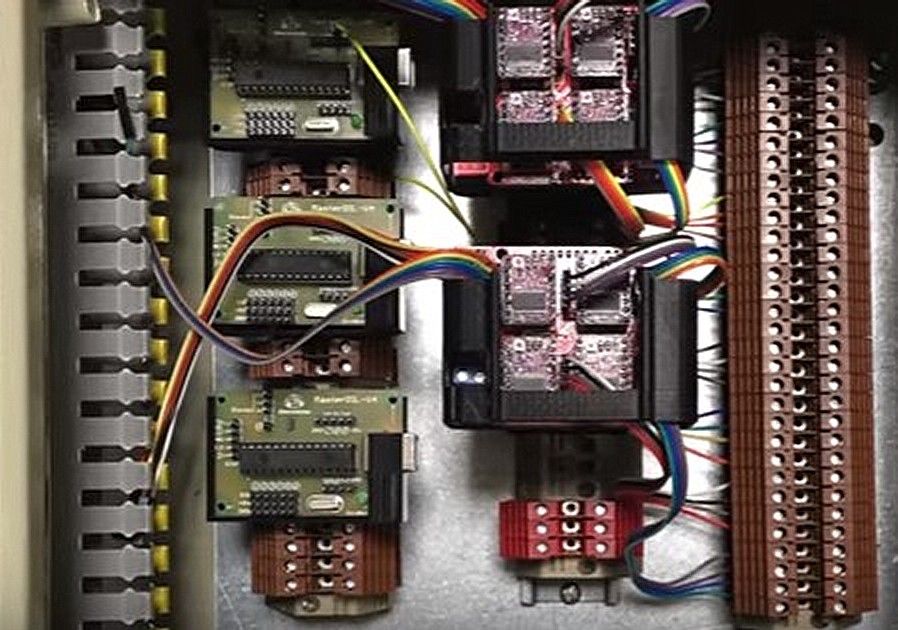

In questo video si vede una applicazione professionale di Theremino Automation e dei componenti hardware del sistema Theremino. Ringraziamo Fabrizio per averci inviato un esempio cosi significativo e ben progettato. Il cablaggio dei moduli Master e dei Driver è perfetto. Un ottimo esempio per chi deve costruire apparecchi simili.
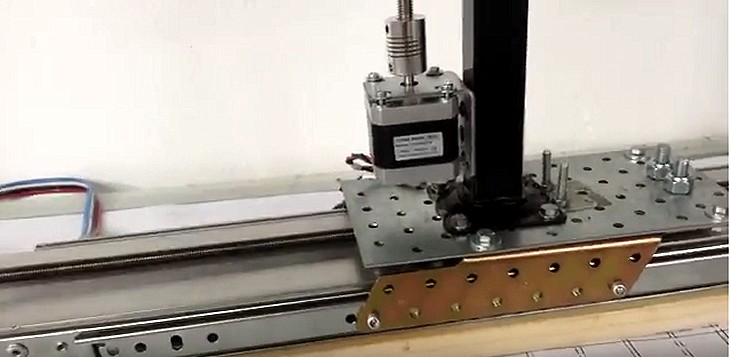
In questo secondo video si vede un test a vuoto dei due bracci robotici, che lavorano in modo coordinato, guidati da un semplice programma scritto con Theremino Automation,
Per maggiori informazioni leggere le note che si trovano sotto ai video di YouTube.
I bracci robotici che si vedono in questi video sono costruiti con stampante 3D, secondo il progetto Zortrax. Non consigliamo di seguire quel progetto perché richiede una infinità di tempo e i risultati non sono soddisfacenti. Stiamo preparando la possibilità di costruire qualcosa del genere in fai da te, ma usando cinghie dentate, al posto degli imprecisi ingranaggi in plastica del progetto Zortrax.
Documentazione
Se non è aggiornata alla ultima versione, cancellate la cache del browser
Theremino_Automation_Help_ITA
Theremino_Automation_Help_ENG
Theremino_Automation_ODT_and_PDF_Docs (documentazione OpenOffice per i traduttori)
Note per le versioni
Per leggere le note relative alle versioni precedenti scaricate questi file:
Theremino_Automation_VersionNotes_ITA.rtf
Theremino_Automation_VersionNotes_ENG.rtf
Versione 7.x
——————————————————————————
QUESTE VERSIONI CONTENGONO NOVITA’ SOSTANZIALI
——————————————————————————
CENTINAIA DI MIGLIORAMENTI IMPORTANTI
E MIGLIAIA DI PICCOLE CORREZIONI
——————————————————————————
Sono così tanti che è impossibile elencarli qui
Leggete la documentazione che si scarica dal paragrafo precedente
——————————————————————————
Versione 7.2
Pagina 48 – Migliorato PressKeys con i comandi per il mouse (LButtonDOWN LButtonUP MButtonDOWN MButtonUP RButtonDOWN RButtonUP)
Pagina 57 – Aggiunti i comandi TTS (Text to Speech)
Pagina 66 – Aggiunto il test StringContains(String, TextToSearch)
Pagina 69 – Aggiunti i test della posizione del cursore MouseX, Y, XP e YP
Pagina 70 – Aggiunte le funzioni di test dei colori (GetCursorPixelColor GetPixelColor(X, Y) GetColorRed GetColorGreen GetColorBlue GetColorHue GetColorSaturation GetColorLightness GetColorIndex GetSaturatedColorName GetNearestColorName)
Versione 7.3
– I caratteri cinesi non cambiano più il font in modo casuale.
– Dopo “Copia e Incolla” i colori e la posizione del cursore sono corretti.
– Dopo “Replace” la posizione di scroll e del cursore sono corretti.
– Wait AppRunning() corretto (pagina 61)
– AppRunning() (pagina 77)
– PauseSlot migliorato (pagina 90)
– Pagina 57 – La lingua del TTS ora si imposta con la sigla ISO della lingua (prima si usava un numero e quindi la lingua poteva cambiare casualmente da un computer all’altro).
Versione 7.4
– Quando si incolla del testo ora il cursore si posiziona sempre alla fine del testo. Non è stato facile e ci abbiamo messo anni perché i controlli RichTextBox fanno come gli pare a loro e sono difficili da addomesticare. Forse col senno del poi avremmo fatto meglio a fare l’editor da zero.
– Automation dalla versione 7.4 può anche scrivere e leggere gli SlotText.
– Automation può anche comunicare con la nuova applicazione Cobot, la quale può ricevere comandi dall’esterno e anche inviare comandi asincroni ad Automation per mezzo dell’evento “Commands From Cobot”.
Versioni 7.5 e 7.6
– Eliminato un errore che accadeva leggendo frequentemente gli StringSlots.
– Miglioramenti nella regolazione delle dimensioni dei pulsanti
– Il passaggio parametri alle funzioni non controllava tutti gli errori
– Doppio click durante run, NON manda più il cursore all’nizio
– Beep-freq-duration su tutti i PC (senza Console-Beep)
– Load CloseApp chiude le applicazioni anche se maiuscole e minuscole non corrispondono.
– I parametri stringa che si passano alle funzioni devono essere racchiusi tra doppi apici.
– Il resize dei controlli si può fare con CTRL-SHIFT + frecce oppure + muovi mouse (senza pulsanti).
– La horizontal scroll bar ora funziona bene mentre prima era difficile da usare.
Versione 7.7
– All’avvio della applicazione lo zoom è quello selezionato col cursore
– Il pulsante “Select next error” fa un ColorAllLines()
– CTRL-V e Paste NON fanno un ColorAllLines()
– Sono stati aggiunti quattro font cinesi che rendono più leggibili i caratteri cinesi
– Corretto il bug di Microsoft che imponeva l’auto selezione delle parole intere
– Eliminato l’errore che accadeva se mancava il file Automation.INI
– La History ora inizia vuota
– Default controls size disabilitato quando si è in RUN altrimenti creava problemi
– Le dimensioni dei controlli si regolano anche con CTRL SHIFT e frecce su/giù
– Non vengono più lasciate righe rosse per errore quando si seleziona in giù e poi in su
– I suoni ora vengono attesi correttamente con “Wait Not MediaPlaying”
(provare con “Demo Programs\LOAD and MEDIA functions\TestSound.txt”)
– Wait TTSready funziona correttamente
– Quando si seleziona verso destra l’ultimo a-capo viene eliminato automaticamente
– I pulsanti UNDO, REDO e HISTORY ora hanno la autoripetizione
– I file vengono caricati e la applicazioni aperte anche se nelle stesse cartelle ci sono percorsi oltre i 260 caratteri (ma i file e le applicazioni da aprire non devono avere percorsi oltre i 260 caratteri)
Versione 7.8
– I comandi esterni possono anche eseguire i buttons per nome !
– Aggiunta la ScrollBar con indicazioni varie e segnalibri.
– Tutte le funzioni SewMachine ora sono libere, senza password
– Si possono aprire i file con “Load FilePathAndName” anche se non si trovano nella cartella Files
– Si possono aggiungere le immagini ai Button (leggete la documentazione e guardate gli esempi)
– Si possono creare variabili senza il prefisso “Variable”, basta “Numeric” o “String”.
– Ci sono i nuovi array, da Array1 a Array9 e le funzioni ArrayLength() e ArrayClear()
– I colori si possono scrivere anche come RGB o ARGB
Per utilizzare le comunicazioni tra Automation e la applicazione COBOT leggete le pagine seguenti nel file di istruzioni di Automation:
- SlotText
- Event_CommandsFromCobot
- I comandi da COBOT a Automation
- I comandi da Automation a COBOT
– Leggete tutte le novità nella documentazione che si scarica dal paragrafo precedente –
Scaricare la applicazione
Download di Theremino Automation – Versione 7.8
Theremino_Automation_V7.8
Theremino_Automation_V7.8_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino Blockly
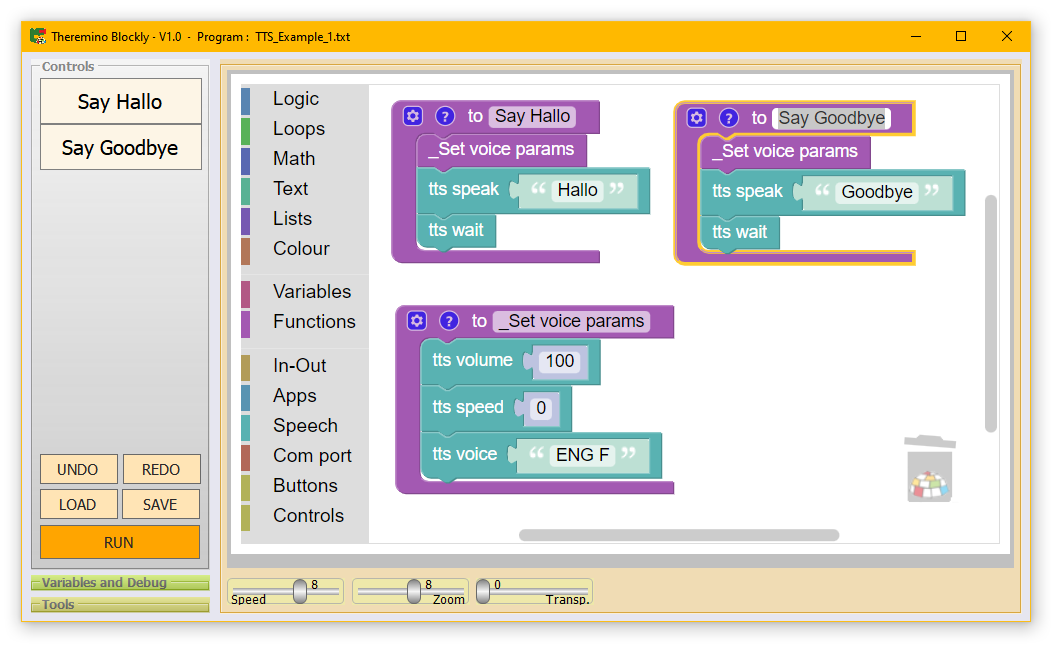
Con Blockly si impara a programmare senza bisogno di studiare la sintassi dei comandi. Collegare i blocchi è facile e intuitivo anche per i più piccoli e il programma viene creato automaticamente.
Theremino_Blockly è il fratello minore di Theremino_Automation, è più semplice ma può comunque accedere a tutte le funzioni principali del nostro sistema, dai semplici input-output alla sintesi e al riconoscimento vocale, al controllo dei robot collaborativi, alla misura delle radiazioni e del radon, al controllo delle aritmie cardiache, alle analisi chimiche, alle misure con oscilloscopi e analizzatori di spettro, ecc…
In questa pagina trovate un indice delle (quasi duecento) applicazioni del nostro sistema, tutte gratuite e Open-Source.
I file che disegnano i blocchi sono derivati dal progetto Open Source di Google e vengono eseguiti da Microsoft Edge. Tutti i file necessari sono già presenti sia in Windows 10 che in Windows 11, senza installazione e senza collegarsi a Internet.
Documentazione
Questo sono i documenti in formato PDF, gli stessi che si scaricano con la applicazione.
Theremino_Blockly_Help_ENG.pdf
Theremino_Blockly_Help_ITA.pdf
Theremino_Blockly_Help_CHN.pdf
Theremino_Blockly_Help_JPN.pdf
Questo sono i documenti originali, in formato OpenOffice, per i traduttori.
Theremino_Blockly_OpenOffice
Versioni
Versione 1.2
– La cartella dove c’è il file Blockly.exe contiene solo le DLL effettivamente utilizzate.
– I comandi dagli Slot vengono eseguiti anche se ci sono solo le funzioni, senza i pulsanti relativi.
Versione 1.3
– Ora si riescono a editare i nomi anche se ci sono più di 16 blocchi.
Scaricare la applicazione
Download di Theremino Blockly – Versione 1.3
Theremino_Blockly_V1.3
Theremino_Blockly_V1.3_WithSources
Questa applicazione e Theremino_GPT sono le uniche del nostro sistema a funzionare solo su Windows 10 e Windows 11 (e forse anche Windows 7, ma non lo abbiamo provato). Inoltre chi volesse ricompilarle dovrà utilizzare Visual Studio 2022 Community (gratuito).
Queste limitazioni sono dovute al cuore di Blockly, scritto da Google, che funziona solo sulle versioni più recenti dei browser e che quindi ci ha costretto a utilizzare WebView2, cioè le stesse funzioni utilizzate dal browser Microsoft Edge. E questo, a catena, ci ha costretto a utilizzare Visual Studio 2022 che è notevolmente più lento e scomodo del Visual Studio 2008.
Theremino CNC

La applicazione Theremino CNC è stata progettata per la massima semplicità. C’è un solo sistema di coordinate, si porta la fresa nel punto di inizio, si azzerano gli assi e si parte. Praticamente il funzionamento è tutto qui.
Ma questa semplicità non deve far pensare a risultati scadenti. I calcoli sono fatti con la massima precisione e si ottengono ottimi risultati.
Chi non fosse contento di questa semplicità, può sfruttare la precisione degli impulsi, generati dal nostro firmware, anche con Mach3. Dato che Mach3 fa di tutto e di più (Nota 1), può sicuramente inviare le coordinate, ai nostri Slots. Il difficile, come ogni altra cosa su Mach3, sarà convincerlo a farlo (probabilmente con un PlugIn).
(Nota 1) Mach3 cerca di fare tutto (anche le più astruse opzioni, che non usa mai nessuno) e questo lo rende difficile da usare per tutti. Il suo comportamento è talmente complesso, che spesso non si sa bene, se sta facendo quello che si crede, o qualcos’altro. Con Mach3 anche fare le Skin è difficile! A volte i file di Mach3 si danneggiano, e i pannelli di regolazione non si aprono più, ma i file di controllo sono scritti in sanscrito (XML) e sono difficili da leggere e da correggere. Per questi motivi, abbiamo deciso di scrivere Theremino CNC.
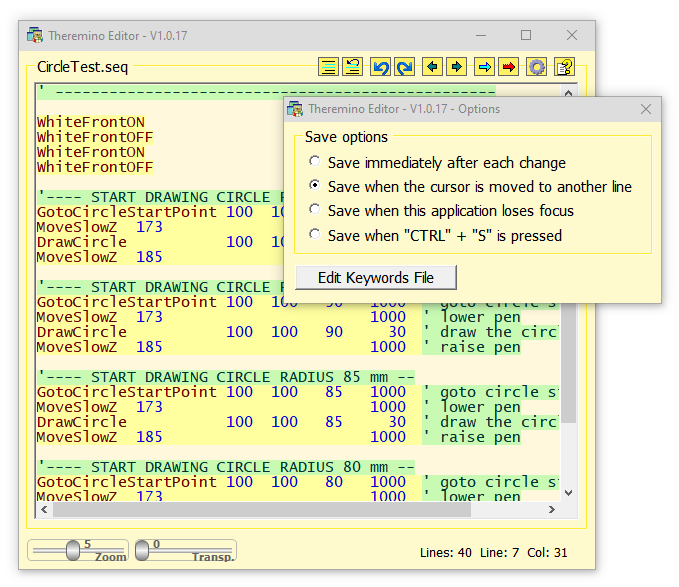
Colori e forme (Skins) modificabili dall’utente
 << Cliccare sulla immagine per vedere le Skin
<< Cliccare sulla immagine per vedere le Skin
Siamo stati criticati per i colori troppo neutri delle nostre applicazioni. Dato che è difficile accontentare tutti, abbiamo aggiunto la possibilità, di cambiare sia i colori, che la forma dei controlli. Theremino CNC ha già una ventina di Skin pronte. Per cambiare Skin (anche durante la lavorazione), basta premere il pulsante “Selected skin”. Chi non fosse ancora contento, può modificare il file dei colori. Se non bastasse, le immagini della cartella Skins sono modificabili. Ma si possono anche aggiungere nuove immagini e creare nuove Skin.
Macchine combinate
Theremino CNC sfrutta la modularità del sistema Theremino e ha ingressi e uscite sugli Slot per ogni tipo di sensore e attuatore. A differenza di altre applicazioni CNC, che sono predisposte per uno scopo preciso, si possono facilmente costruire macchine “combinate”, che sfruttano una stessa meccanica per più lavorazioni. In questo modo gli stessi motori e la stessa meccanica (che costituiscono le parti più costose) potranno servire sia per la fresa CNC, che per le incisioni con il laser, che per la stampa 3D e anche per macchine particolari, come, ad esempio, il taglio del polistirolo.
Buoni esempi di variazione, rispetto alla solita CNC a tre assi, sono le macchine per il taglio polistirolo, visibili nei seguenti video e links:
https://www.youtube.com/watch?v=tjPG4KdE7Mg
https://www.youtube.com/watch?v=ayC2gRUJn8o
https://www.youtube.com/watch?v=_S2smZKZWRI
https://www.youtube.com/watch?v=NCjrHcDag6w
rcgroups – Interessante forum per i costruttori di modelli radiocomandati e droni.
baronerosso – Forum sul taglio polistirolo con Theremino CNC. Il thread contiene molte utili informazioni e ottime immagini per realizzare una meccanica a quattro assi con filo caldo.
Precisione delle coordinate
Le caselle che indicano la posizione degli assi, mostrano tre cifre decimali dopo la virgola. Questo serve per facilitare la lettura, ma i calcoli vengono fatti in “Floating point double precision” (con vettori a 5 dimensioni). E anche le coordinate dei GCode, vengono lette con tutte le cifre decimali disponibili (fino a 16 cifre dopo la virgola). Questa precisione potrebbe apparire esagerata, ma ci assicura che in ogni situazione i risultati saranno perfetti. Leggere questo articolo, che mostra l’imprecisione di Mach3, per lavorazioni molto piccole (le due foto a confronto).
Funzionamento sui vecchi computer
Sia Theremino CNC che Theremino HAL funzionano bene su qualunque computer o notebook, da WindowsXP fino a Windows 10, sia a 32 che a 64bit.

Qui si vede il computer che usiamo normalmente in laboratorio, per fare i PCB con la fresa Proxxon. Si tratta di un notebook, in funzione da oltre dodici anni, con Windows XP, processore Celeron single core, poca cache e scheda video antiquata. Dalla poca memoria che c’è (1GB), la scheda video mangia 300 MegaByte, lasciando solo 700 MegaByte al sistema operativo. In queste condizioni preistoriche, HAL viaggia a oltre 400 FPS (potrebbero essere anche di più, ma sono stati limitati da “Comm speed = 10”) e Theremino CNC muove i motori fluidamente, mentre aggiorna la grafica del toolpath e la trasla per seguire la lavorazione. Infine si può notare, in basso a destra, l’icona del “Task Manager” (quadratino verde), che indica un consumo di CPU di circa il 30%.
Theremino CNC Adapter o USB nativa?
Le vecchie macchine, predisposte per Mach3 o LinuxCNC, venivano normalmente collegate, tramite una “Porta parallela”. Oggi le porte parallele sono praticamente estinte, e le si devono simulare, con costosi adattatori PCMCIA. Inoltre far fare gli step, uno per uno, direttamente al PC, porta a una grande instabilità degli impulsi, vedere questa sezione. Per collegare la macchina via USB, si potrebbe rifare il suo cablaggio, e dotarla di un Master e di porta USB. Oppure si può staccare il cavo dalla parallela, collegarla a un Theremino CNC Adapter, e ricominciare subito a lavorare.
Quali controller usare per i motori stepper?
Sono assolutamente da evitare i costosi cnc-controller con i driver saldati su un unica piastra. Al primo difetto si deve buttare l’intero controller. Quindi si spende molto, si spreca e si inquina, andando anche contro alle nostre regole per limitare gli sprechi. Una buona soluzione è invece usare i drivers con i connettori, in modo da poterli sostituire o aggiungere per aumentare il numero di assi.

Non fatevi ingannare dai venditori che non pubblicano gli schemi e “lasciano pensare” che i loro driver siano migliori. Quando si va a controllare i chip sono gli stessi di questi driver, si tratta sempre degli ottimi A4988 (o equivalenti) prodotti da Allegro.
Maggiori informazioni e schemi nelle note sui Controllers e sulle Driver Board.
Driver Board – Una base di supporto per i driver
Non acquistate costosi cnc-controller con i chip direttamente saldati sulla piastra! I driver devono sempre essere sostituibili, come nelle Driver Board di queste immagini.



Per ospitare i driver, consigliamo di mantenersi completamente modulari, con tutti i componenti sostituibili singolarmente, nel pieno rispetto dei nostri nostri principi per limitare gli sprechi.
Maggiori informazioni e schemi nelle note sui Controllers e sulle Driver Board.
Incidere PCB
Tra i file di esempio di Theremino CNC ci sono praticamente tutti i circuiti stampati del sistema Theremino, se ne mancassero chiedeteli via mail o nel blog e li aggiungeremo.
I file GCode sono stati scritti dalla estensione FastGcode che abbiamo scritto per Eagle e i file di Eagle sono nei download di tutti i progetti.
FastGcode e alcune spiegazioni per Eagle sono qui:
https://www.theremino.com/downloads/uncategorized#eagle
Il nostro modo di fare i PCB (prototipi) prevede isolamenti da 0.8 mm, per cui si possono fresare solo PCB con componenti non troppo piccoli. Tutti gli integrati DIL vanno bene e si possono usare facilmente anche i componenti SMD (dimensioni 1206 e 0805). Se si fresa con molta cura, tenendo lo zero un po’ alto, si arriva anche ai chip SOIC.
Frese Proxxon
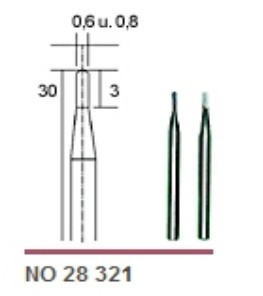
La fresa che utilizziamo normalmente è una Proxxon 28 321, facilmente reperibile nei Brico Center. Una confezione da due frese (0.6 e 0.8 mm) costa circa otto euro. Purtroppo la 0.6 mm si rompe troppo facilmente, ma con la 0.8 si fa tutto in una sola passata (scontornamenti, fori e taglio finale).
Abbiamo utilizzato queste Proxxon per anni fino a che abbiamo scoperto che esiste di meglio a cifre ragionevoli.
Frese migliori delle Proxxon
Da quando abbiamo scoperto queste è tutto un altro andare.

- Questo è il modello 626, diamantato da 0.8 mm.
- Taglia in modo perfetto.
- Ha la punta piatta e lascia il fondo che sembra fatto con la fotoincisione.
- Non lascia cordoli tra una passata e l’altra. Con le Proxxon si doveva utilizzare una sovrapposizione da 0.2 – 0.3 mm per evitare che rimanessero sbavature, con queste frese si può ridurla a 0.1 o anche 0.05 e il tempo di lavorazione si dimezza.
- I bordi delle piste sono talmente netti che non si deve nemmeno più passare la carta vetro finale.
- I fori sono perfetti quasi come se fossero fatti con la punta da trapano.
- Anche dopo molti PCB continua a tagliare bene.
Per acquistarle andate qui: http://www.mjcnc.com/fresa-626.html
(4.5 Euro + 8 Euro spedizione. Quindi 5 pezzi fanno 30.5 Euro)
Garantiamo che non si tratta di pubblicità, la ditta mjcnc non sa nemmeno che li abbiamo linkati. Magari ci darebbero qualcosa se lo sapessero. Ma non abbiamo tempo per raccogliere spiccioli in questo modo, abbiamo altre ambizioni, una delle quali è di mantenere questo sito “pulito”, totalmente senza pubblicità. Perché le stiamo suggerendo allora? Perché avremmo preferito scoprirle cinque anni prima e ci dispiace che altri possano trovarsi nella stessa situazione.
Aggiornare Theremino CNC a una nuova versione
Quando si scarica una nuova versione è bene non sovrascrivere i propri file di configurazione, sia del CNC che dell’HAL. Un modo sicuro per non perdere niente è copiare la cartella principale di ThereminoCNC, che quindi diventerà “ThereminoCNC..-Copia”, quindi sovrascrivere tutto e infine andare a riprendere le proprie configurazioni dalle cartelle della copia.
I file di configurazione personali, da conservare e ripristinare, sono:
Theremino_CNC_INI.txt
Theremino_HAL_ConfigDatabase.txt
Theremino_HAL_INI.txt
Te mperatureTables.txt
Se passate a CNC 5.4 dovete prendere i parametri del PID dal nuovo file TemperatureTables
Downloads
PRE-RELEASE – Versione 3.27 – La documentazione è approssimativa e solo in italiano. Due nuove versioni di Look Ahead, permettono di non tagliare le curve, senza la forte penalizzazione di tempo, provocata dall’ExactStop. I comandi di azzeramento e di Home non sono ancora funzionanti. La visualizzazione del Toolpath contiene imprecisioni che metteremo a posto al più presto.
PRE-RELEASE – Versione 3.28 – Nella versione precedente il LookAhead conteneva un errore (l’ultimo segmento del file veniva calcolato male). Ora i due LookAhead sono diventati uno solo, semplificato e ben testato. I comandi di azzeramento e di Home non sono ancora funzionanti. La visualizzazione del Toolpath contiene ancora imprecisioni, che metteremo a posto al più presto.
PRE-RELEASE – Versione 3.29 – La visualizzazione del Toolpath è ancora da migliorare. I due pulsanti “Calibrate” sono da finire. Nove pagine dell’help sono da finire. Tutto il resto è OK.
PRE-RELEASE – Versione 3.30 – Nella 3.29 c’era un grosso baco, dopo un M-zero, il motore del mandrino non si riavviava e c’era il rischio di rompere l’utensile. Ora questo errore è sistemato. La visualizzazione del Toolpath è ancora da migliorare. I due pulsanti “Calibrate” sono da finire. L’help in italiano è finalmente completo.
PRE-RELEASE – Versione 3.31 – La visualizzazione del Toolpath è quasi finita, ora indica correttamente anche il primo segmento e sono disponibili nuove viste per gli assi A e B. I due pulsanti “Calibrate” sono da finire.
PRE-RELEASE – Versione 3.32 – I due pulsanti “Calibrate” sono da finire. Tutto il resto è a posto. Le variazioni di velocità durante il JOG sono risolte. Molte piccole imprecisioni sono corrette. Ora si possono caricare i file GCode da percorsi a piacere, anche non contenuti nelle cartelle di Theremino CNC.
PRE-RELEASE – Versione 3.33 e 3.34 – I pulsanti “Calibrate” sono diventati tre. La pagina di regolazione delle calibrazioni è finita. Il nuovo segnale Enable OUT è funzionante. Il file di Help è aggiornato. Restano da finire gli azzeramenti e le compensazioni a fine calibrazioni. Se nessuno inventa nuove cose da fare, in pochi giorni riusciremo a finirlo.
PRE-RELEASE – Versione 3.35 – Aggiunto il controllo dell’asse Zeta con i tasti Z e X per le tastiere senza PageUp/Down. Aggiunti i tasti di ZOOM anche per il ToolPath. Sistemata la chiusura dei pannelli quando il mouse si allontana. Migliorato il testo del titolo dei Box di messaggi. Il nuovo segnale Enable OUT non viene abilitato se si lancia una applicazione con il pulsante “IN OUT enable” disabilitato. Il file di Help è aggiornato. Restano da finire gli azzeramenti e le compensazioni a fine calibrazioni. Se nessuno inventa nuove cose da fare, in pochi giorni riusciremo a finirlo.
PRE-RELEASE – Versione 3.36 – Speed anche negative per mandrino antiorario. Calibrazioni completate. Il pulsante “IN OUT enable” può essere disabilitato per fare prove senza motori e senza perdere l’allineamento con la macchina.
PRE-RELEASE – Versioni 3.38 e 3.39 – Lo Zoom del Toolpath è molto migliorato – Il Pan si fa trascinando con il mouse – Si può usare un GamePad (anche Wireless) per Joggare e per le principali funzioni – Quando il Toolpath è ingrandito segue automaticamente la lavorazione – Moltissimi altri miglioramenti… vale la pena di rileggere tutto il file di istruzioni.
Versione 4.0 – Le innovazioni sono così tante che è impossibile elencarle qui. Leggete i file di documentazione. Tutte le funzioni richieste nei mesi scorsi sono implementate, anche il controllo delle temperature, per le stampanti 3D, è completo. Ora si possono controllare anche le macchine più strane, laser per incisioni, taglio polistitrolo, eccetera…
Versione 4.1 – Piccoli miglioramenti sulla posizione dei tasti e la dimensione minima della finestra. Con questa versione si riesce a lavorare anche su XP e su computer con schermo piccolo e driver video particolarmente strani.
Versione 4.2 – Eliminata la necessità di installare DirectX!!! E eliminati anche i lampeggiamenti che si verificavano durante l’avvio.
Versione 4.3 – Piccole correzioni nella documentazione. Eliminata la CustomControls.dll che dava problemi a Linux e Mac
Versione 4.4
– I movimenti di Jog sono stabilizzati, la velocità è leggermente maggiore e non miagolano più.
– Nuovo menu Opzioni con FirstSlot e JogSpeed per “Normal, Shift, Alt e Ctrl”.
– Ritardo regolabile per motori del mandrino che si avviano lentamente.
– Possibilità di aprire e salvare i GCode anche attraverso la rete locale.
– I codici G02 e G03 vengono ricordati anche nelle linee seguenti (Gcode test Riccelli).
– La documentazione è migliorata ed è stato corretto un riferimento gli Slot 33 (che erano nominati 27 per errore).
Versione 4.5
Sostituito Theremino HAL con la versione 7.0 (la versione 6.9 dava errori cambiando tipo ai Pin).
Versione 4.6
– La linea selezionata del GCode (evidenziata in blu) ora si trova al centro della zona visibile.
– Il nuovo comando “SlotSkipInput” (Slot 34) termina la linea in esecuzione e passa immediatamente alla seguente. Lo si può usare, ad esempio, per terminare la discesa dell’asse Zeta e fare fori di profondità costante, su materiali di spessore irregolare.
– Il nuovo “Low acceleration compensator” (Menu Opzioni e Appendice 26 del file di Help) permette di avere tolleranze controllate anche su macchine con motori a bassa accelerazione.
– Il “MainEnableOutput” (Slot23) ora viene correttamente impostato anche all’avvio della applicazione.
– Il codice M84 ora oltre allo Slot 23 (Abilitazione generale della macchina), disabilita anche il pulsante “IN OUT enabled”.
– Lo Slot “Emergency” e la barra spazio ora interrompono l’esecuzione in ogni momento e non solo nelle fasi di lavorazione come nelle versioni precedenti.
– Lo Slot “Emergency” e la barra spazio mettono a zero tutti i segnali di controllo dei dispositivi esterni.
Versione 4.7
– Aggiunto messaggio “Premi OK” nella calibrazione, questo permette di leggere la quota prima di azzerare.
Versione 4.8
– Il messaggio “Premi OK” nella calibrazione aveva causato uno stranissimo problema, i tasti SHIFT smettevano di funzionare. Ora per farli ri-funzionare dopo la calibrazione c’è un “Flush” totale della tastiera. Questo si direbbe davvero un baco di Windows, non è facile trovarne perché Windows è esente da piccoli difetti di questo genere, ma forse stavolta ne abbiamo trovato uno.
Versione 4.9
– La “Speed” viene rimessa a zero chiudendo la applicazione, così non accade più che all’avvio il mandrino si metta a girare.
– Le linee G02 e G03 accettano anche errori, ad esempio R = zero. Naturalmente la curva non viene eseguita ma la applicazione non si blocca più con un errore.
Versione 5.0
– Le versioni dalla 4.4 alla 4.9 contenevano un errore che rallentava i movimenti ad ogni curva. Ora i movimenti sono nuovamente fluidi, come nelle versioni 4.3 e precedenti. Inoltre i tempi di lavorazione sono molto ridotti, in alcuni casi quasi dimezzati.
– Corretto lo scroll orizzontale dopo che si esegue un Load-Gcode.
– Aggiunto il modo CoreXY – vedere : http://corexy.com/theory.html
– Aggiunti i suoni di segnalazione per la fine della lavorazione.
– Se il master perde la connessione nel pulsante STOP viene scritto “Master error”.
– Se il master perde la connessione la lavorazione viene fermata.
– Il comando GotoZero muove prima gli assi XY e poi l’asse Z.
– Il comando GotoHome muove prima l’asse Z e poi gli assi XY.
– Ora è possibile eseguire il GCode Step By Step (una riga per volta).
– Le opzioni sono ampliate con molti comandi tra cui la direzione di CalibrateZ.
– Ora con i tasti F5 (RUN) e F8 (STEP) si può avviare il Gcode, fermarlo ed eseguirlo una riga per volta.
– Ora si possono usare i tasti della tastiera e il Joystick anche quando la lavorazione è in PAUSA.
– Queste variazioni, e altre minori, sono spiegate dettagliatamente nella documentazione.
Versione 5.1
– In alcuni casi poteva accadere di non riuscire a fare gli azzeramenti con i sensori di fondo corsa. Questo accadeva se gli “Step Per Millimetro” impostati nell’HAL erano particolarmente bassi (100 o meno). Non bisognerebbe mai trovarsi con “Step Per Millimetro” molto bassi, se accade è bene aumentare i microstep. Comunque questo errore è stato corretto e non accadono più problemi anche con valori molto bassi. Tenere comunque gli “Step Per Millimetro” almeno a 20.
– Abbiamo invertito il funzionamento di F5 e F8 per uniformarlo allo standard di Automation e delle applicazioni Microsoft. Quindi ora F5 = STEP e F8 = RUN.
Versione 5.2
– La pausa per l’avviamento del motore del mandrino ora emette un messaggio con il conto alla rovescia.
– La pausa per l’avviamento del motore del mandrino può avvenire nei cambi da “Rapid” a “Work”, oppure dopo i codici M03, M04, M13, M14.
– Il caricamento di file molto lunghi viene accompagnato con un messaggio di attesa.
– Nelle versioni precedenti i file GCode molto lunghi (oltre le diecimila righe) rallentavano l’esecuzione. Ora l’esecuzione è fluida anche con file da milioni di righe.
Versione 5.3
– Ora si può utilizzare anche lo IOT-HAL al posto dell’HAL, basta che ci sia nella cartella.
– Si possono aprire i file GCODE da linea di comando
– Se per errore si apre CNC due volte la seconda apertura viene eliminata.
– Le applicazioni HAL non vengono aperte due volte se sono già aperte.
– Aggiunte SpeedMax e AccMax nelle opzioni (regolarle uguali ai valori impostati nell’HAL)
– Quando i fine corsa agiscono, si può muovere con SHIFT + Frecce della tastiera
– Migliorato il calcolo del tempo. Tiene conto della accelerazione e anche in parte dei LookAhead
– Aggiustato M05
– Controllo delle temperature migliorato.
– Tabelle delle temperature migliorate. Ora si possono impostare anche i parametri del PID.
– Il primo movimento dopo la attesa che il mandrino si avvii viene eseguito correttamente.
Versione 5.4 (Aprile 2023)
– Aggiunte le opzioni SpeedMax e AccMax che
– Quando i fine corsa agiscono, per sbloccare si usa SHIFT + Frecce della tastiera
– Aggiunti i parametri dei PID per le temperature
– Il comando MoveTo 10 20 ora muove solo gli assi X e Y
– Il comando MoveTo — — 30 ora muove solo l’asse Z
– Le rotazioni ora agiscono attorno allo zero o attorno all’angolo inferiore sinistro.
– Aggiunte le opzioni “First Slot” e “First TextSlot” per impostare gli slot di comunicazione
– L’elenco completo dei comandi via SlotText e i consigli per usarli sono nella Appendice 27
– Ora si possono eseguire comandi inviati da altre applicazioni. Si può quindi automatizzare un intero processo, ad esempio utilizzando un braccio robotico e una applicazione che controlla sia CNC che i movimenti del braccio.
– Tra i comandi più importanti c’è la possibilità di avviare un GCode, metterlo in pausa, fermarlo, eseguirne una parte o anche una sola riga, caricare un altro GCode, cambiare i parametri di velocità, andare in posizioni predefinite o in posizioni che si specificano nel comando stesso, effettuare gli azzeramenti, leggere lo stato della macchina, ecc..
Versione 5.5 (Marzo 2024)
– Ora il percorso dee file GCODE viene memorizzato in relativo e la cartella dei file viene mantenuta anche se il file non viene trovato.
Versione 5.6 (Aprile 2024)
– Nelle versioni 5.4 e 5.5 mancavano le due DLL di DirectX per cui su molti Windows davano un errore e non si aprivano. La versione 5.6 corregge questo problema
– – – – – –
Le versioni 5.x contengono notevoli miglioramenti.
Scaricate la 5.6 e sostituitela alla versione che state utilizzando.
Per mantenere le stesse impostazioni della versione precedente
si consiglia di copiare i seguenti file, dalla vecchia versione:
“Theremino_HAL_INI.txt”
“TemperatureTables.txt” (ma aggiornare i PID dal nuovo file)
“Theremino_CNC_INI.txt”
Dovete sovrascrivere i file della nuova versione
come spiegato anche nel paragrafo precedente.
– – – – – –
ATTENZIONE
Nelle versioni 5.4 e 5.5 mancavano le due DLL di DirectX
per cui su molti Windows davano un errore e non si aprivano.
La nuova versione 5.6 corregge questo problema.
Download di Theremino CNC – Versione 5.6
Theremino_CNC_V5.6.zip
Theremino_CNC_V5.6_WithSources.zip
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Questa applicazione potrebbe non avviarsi perché usa DirectX. Se necessario scaricate la versione di DirectX, da noi consigliata e seguite le note di installazione.
Documentazione
Questo sono i documenti in formato PDF, gli stessi che si scaricano con la applicazione.
G_and_M_codes_ITA.pdf
G_and_M_codes_ENG.pdf
Theremino_CNC_Help_ITA.pdf
Theremino_CNC_Help_ENG.pdf
Questo sono i documenti originali, in formato OpenOffice, per i traduttori.
G_and_M_codes_ITA_OpenOfficeDocument
G_and_M_codes_ENG_OpenOfficeDocument
Theremino_CNC_Help_ITA_OpenOfficeDocument
Theremino_CNC_Help_ENG_OpenOfficeDocument
Questi sono due video sul nuovo stabilizzatore di velocità (spiegazioni nel file di help):
ThereminoCNC_V3.31_Without_Stabilizer.avi
ThereminoCNC_V3.31_With_Stabilizer.avi
Theremino Replicator

“Theremino Replicator” – alias “3D Printers” è stato fagocitato da Theremino CNC. E lo stesso è accaduto per le macchine per il taglio laser, per le incisioni e per il taglio del polistirolo con filo caldo.
Manteniamo questo spazio che verrà probabilmente riempito con “Theremino UvPrinter”
UvPrinter?
Sarà una specie di “Stereolitografia a ultravioletti” ma non si chiamerà STL, perché è un nome orribile. Negli STL di “Stereo” non c’è proprio niente e la litografia era un processo completamente diverso.
In sostanza la applicazione Theremino UvPrinter servirà per costruire macchine che polimerizzano una resina con immagini a ultravioletti. Il risultato è di creare oggetti molto più velocemente che con le stampanti 3D. Ma anche la possibilità di creare particolari incredibilmente precisi. Inoltre la meccanica è più semplice, non servono tre assi ortogonali, ma un unico asse che sale e scende.
Theremino QRcodes
Questo progetto è composto da due applicazioni Theremino QRcode e Theremino QRdecoder, che codificano e decodificano tutti i tipi di QRcode (etichette quadrate) e di BarCode (codici a barre).
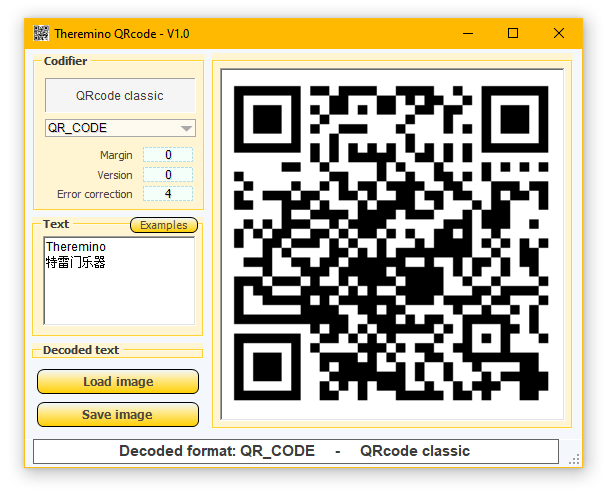
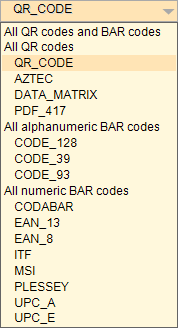
Si possono utilizzare quindici tipi diversi di codici, quattro codici QR e undici codici a barre, di cui tre alfanumerici e otto numerici.
Sia il codificatore che il decodificatore sono molto veloci, per cui mentre si scrive nella applicazione che codifica, si vede la grafica del codice che cambia e contemporaneamente si vede anche il testo decodificato che si modifica immediatamente nelle altre applicazioni.
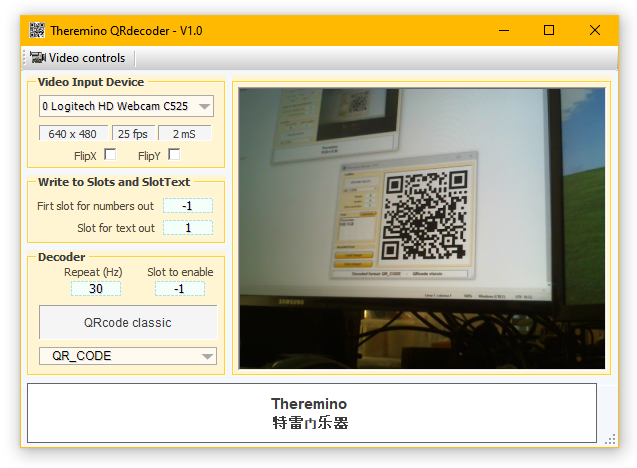
Le applicazione QRdecoder, oltre a inviare il testo decodificato verso uno SlotText, può anche decodificare dei numeri che si trovano nel testo e inviarli a numerosi Slot numerici. Nel testo del codice si deve scrivere ad esempio: “Slots 33 44 55” e i numeri 33, 44 e 55 verranno inviati a tre Slot successivi, partendo dallo slot indicato dalla casella “First slot”.
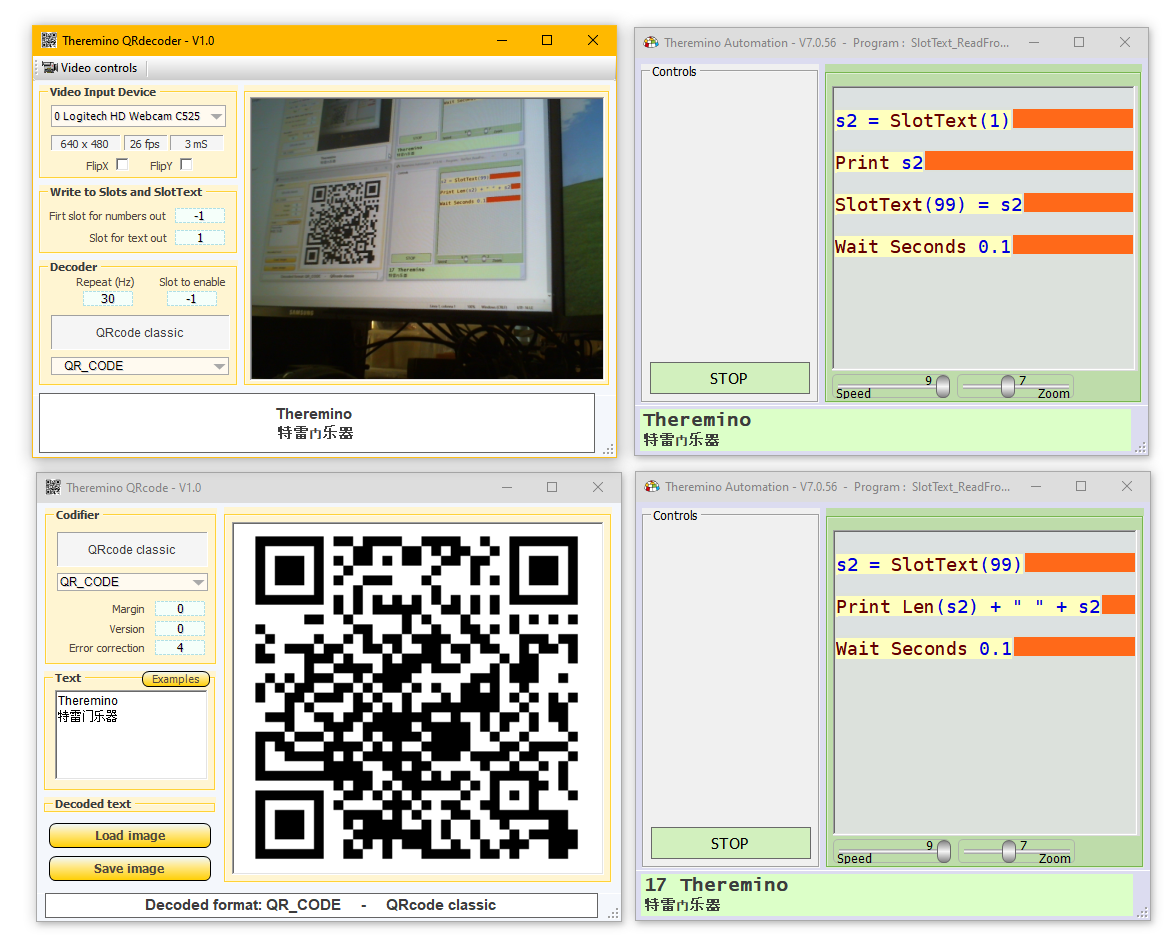
In questa ultima immagine si vede la applicazione QRdecoder che decodifica il testo e lo invia allo SlotText 1, che viene poi letto da una applicazione Theremino Automation (in alto a destra) la quale lo stampa nella sua riga inferiore.
Questa immagine evidenzia anche le possibilità di trasferire stringhe tra applicazioni per mezzo degli SlotText. Infatti la Applicazione Automation superiore copia il testo decodificato sullo SlotText 99 e la applicazione Automation inferiore lo legge. Infine quest’ultima stampa nella sua riga inferiore un numero che è la lunghezza del testo in caratteri, seguito dal testo stesso.
Le operazioni di codifica e decodifica delle immagini sono effettuate per mezzo della libreria ZXing che è Open Source e totalmente gratuita, senza alcuna condizione.
Download di Theremino QRcode e QRdecoder
Theremino_QRcode_V1.1
Theremino_QRcode_V1.1_WithSources
Theremino_QRdecoder_V1.3
Theremino_QRdecoder_V1.3_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino Arm

Questo è il programma di controllo per un braccio robotico. Attualmente sono implementati solo quattro snodi, ma tutto è pronto per espandere o modificare il programma, per ogni genere di applicazioni simili.

Chi vuole cimentarsi con la costruzione di bracci robotici, può usare questo programma come esempio, e come collezione di funzioni utili. Ma tenga presente che sta intraprendendo un progetto molto impegnativo, dove le cose da imparare e da capire sono molte. Ci vorrà molto tempo prima di costruire qualcosa che si muova in modo sensato.
Anche la taratura delle lunghezze e degli angoli è un compito difficile, che richiede di aver ben compreso quello che si sta facendo. Se le tarature non sono precise, la punta del braccio non si muove su piani ortogonali e paralleli al piano di base, i rettangoli diventano dei trapezi e le linee rette diventano delle curve.
Se avete bisogno di consigli scriveteci. Per facilitare i primi esperimenti potremo darvi informazioni sui particolari del piccolo braccio scrivente che abbiamo costruito per prova e che potete vedere in azione nella pagina Video and Images
Costruzione meccanica
In questo file troverete i dettagli costruttivi per un piccolo braccio robotico (progetto presentato al concorso make4cash della rivista ELETTRONICA OPEN SOURCE)
RobotArm (file PDF con dettagli meccanici ed elettrici).
Per migliorare la precisione si potrebbero provare i servo DS8231 visibili qui:
www.theremino.com/hardware/actuators/motors
Questi servo costano abbastanza (circa 70 euro), ma promettono prestazioni cinque volte migliori dei TGY930. Non li abbiamo provati per cui inviateci, per piacere, i risultati dei vostri eventuali esperimenti.

Il Link1, che collega il secondo motore con il terzo, può essere realizzato come in questa immagine. Eliminando le crociere in plastica si ottiene maggiore rigidità.
– – – – – – –
Uso dei parametri non spiegati nei file di istruzioni
- Rapid (mm/min) – Velocità massima per gli spostamenti rapidi in millimetri al minuto.
- Work (mm/min) – Velocità massima durante la lavorazione (con punta che tocca la superficie), in millimetri al minuto.
- Max error – Massimo errore (approssimativamente in millimetri). Diminuendo questo valore i movimenti rallentano. Oltre a un certo punto si ottengono solo rallentamenti e nessun miglioramento di precisione. Anzi si ottengono linee più dritte, con velocità abbastanza alte e “Max error” superiore a “1”.
- Override Z – Abilitando questo parametro i valori di Z (altezza) del GCode non vengono più usati. Al loro posto si usano le due altezze fisse: “Zup” e “Zdown”.
- Z trip level – Se il valore Z del Gcode supera questo valore si usa “Zup” altrimenti “Zdown”. Solitamente si tiene a zero, tranne che per GCode particolari.
- Z up – Livello alto, per gli spostamenti rapidi, con punta che non tocca la superficie. Si tiene a qualche millimetro dalla superficie, per essere sicuri di non toccarla per sbaglio. Se si aumenta questo valore la sicurezza aumenta, ma la lavorazione viene rallentata.
- Z down – Livello basso, per i movimenti di lavoro. Solitamente si tiene a zero.
- GCode automation slot – Altre applicazioni possono comandare il cambio di Gcode scrivendo numeri interi in questo slot.
-1 = Stop e riavvolgi il GCode alla prima linea
0 = Pausa
1 = Carica e avvia il primo Gcode
2 = Carica e avvia il secondo Gcode
3 fino a “N” = Carica e avvia i Gcode seguenti. I GCode devono trovarsi nella cartella “Theremino_Arm\Media\AutomationFiles” e vengono usati in ordine alfabetico. Per stabilire il loro ordine si consiglia di chiamarli 01-Nome / 02-Nome / 03-Nome etc…
- Automatic parking position – Abilitando questa casella il braccio torna automaticamente alla posizione di parcheggio durante le pause.
– – – – – – –
Note per le versioni
Versione 1.3 – piccoli miglioramenti tra cui la lettura di file GCode con o senza numeri di linea, con qualunque separatore e in tutti i formati più comuni.
Versione 1.5 – altri miglioramenti come la scala variabile per la finestra grafica e il numero di versione visibile nel titolo della applicazione.
Versione 1.6 – miglioramento della precisione di disegno tramite l’aggiunta di un piccolo ritardo ad ogni alzo penna per dar tempo ai motori di arrivare in posizione, ora i cerchi si chiudono meglio.
C’e’ stato un errore di numerazione e molte versioni intermedie non sono state pubblicate per cui dalla 1.6 si salta direttamente alla versione 2.7.
Versione 2.7 – Grandi miglioramenti! – Chi ha costruito un RobotArm deve assolutamente aggiornarsi a questa versione. L’algoritmo di creazione del percorso e’ completamente rifatto, la velocità di disegno e’ aumentata moltissimo senza perdere in precisione. www.youtube.com/watch?v=S8aXLacX14s Alcune piccole imprecisioni nel disegno (cerchi che non si chiudevano bene) sono completamente risolte. I parametri sono piu’ facili da comprendere ed e’ anche disponibile un comodo preview della immagine generata dal Gcode.
Versione 2.11 – Scara e Delta e molti piccoli miglioramenti.
Versione 3.1 – Miglioramenti negli algoritmi delle configurazioni Scara e Delta.
Versione 3.2 – Eliminato l’errore che avveniva all’apertura se l’ultima volta ThereminoArm era stato chiuso da minimizzato. Eliminato un difetto che faceva rallentare notevolmente il disegno se non si abilitava “Override” e con alcuni Gcode. Caricato correttamente il Gcode quando si carica una configurazione.
Versione 3.3 – Corretto un piccolo errore di calcolo. Si dovrebbe notare un leggero miglioramento della posizione dei punti iniziali e finali di ogni segmento (quando la penna si solleva e quando si abbassa e comincia a scrivere)
Versione 3.4 – Aggiunto il “Panic button” con la “Barra spazio”. Aggiunta la barra di stato con alcuni messaggi di errore (codici non riconosciuti e Panic). Migliorata la lettura dei Gcode che non si fa ingannare dai codici non riconosciuti (G2, G3 e G17)
Versioni 3.5 e 3.6 – Corretti piccoli difetti nati durante il passaggio da XP a Windows-7/8.
Versione 4.2 – Aggiunto il “GCode automation slot” e le caselle per disabilitare il quarto motore e il ritorno automatico alla posizione iniziale. Eliminati molti piccoli errori. Questa versione raccoglie tutti i miglioramenti degli ultimi mesi. Scaricatela!!!
Versione 4.4 – Molti piccoli miglioramenti.
Versione 4.5
– Aggiunta la possibilità di utilizzare motori Stepper.
– Se si abilita il pulsante “Stepper” allora gli Slot vengono utilizzati uno si e uno no (gli Stepper utilizzano due Slot ognuno).
Download di Theremino Arm – Versione 4.5
Theremino_Arm_V4.5
Theremino_Arm_V4.5_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
InMoov – Un robot Open Source e 3D printed


Il robot InMoov è totalmente compatibile con il sistema Theremino, si sostituiscono gli Arduino con i Master, si guadagna spazio, si spende meno e la velocità di comunicazione aumenta (naturalmente si dovrà saper trafficare con il software come spiegato in seguito).
Questo è un interessante caso di evoluzione parallela! Due progetti totalmente separati (Theremino e InMoov) sono arrivati alle stesse conclusioni (lo stesso sistema operativo, le stesse tensioni di alimentazione, gli stessi connettori, gli stessi cavi), tanto da essere del tutto compatibili elettricamente.
Il controllo di InMoov avviene per mezzo di un tablet touch-screen con Windows 10. Il progettista di InMoove “Gaël Langevin” scrive: “… dopo molte prove con la OdroidU3 e la Raspi2, sono arrivato alla conclusione che i processori ARM sono troppo lenti …”
A metà di questo video si vede il tablet di controllo con Windows10:
https://www.youtube.com/watch?v=b3O45Gr71bk
Interessante anche notare che InMoove usa normali servo per tutti i movimenti. Per ogni braccio, dove lo sforzo è maggiore, usa 4 servo HS805BB da 24 Kg in parallelo. Per gli altri movimenti usa servo più piccoli.
– – – – – – –
ATTENZIONE: Questo è un progetto molto complesso. Prima di iniziare la sua costruzione è bene fare molti esperimenti collegando qualche semplice Led e Servo a un Master. Si dovranno conoscere bene la applicazione HAL, lo Slot Viewer e gli Slot. Poi, per programmare i movimenti, serviranno anche buone basi di programmazione con Theremino Automation o meglio ancora con Visual Studio Express 2008, oppure con Python che è il linguaggio preferito da “Gaël Langevin”.
Chi conosce bene il sistema Theremino, può usare i Master per generare i segnali per i Servo. In questo caso i numeri degli Slot saranno diversi da quelli di Arduino e si deve avere abbastanza esperienza per rimappare tutti i sensori e modificare il software in modo adeguato. Chi non conosce la programmazione e l’elettronica, farebbe quindi meglio a seguire alla lettera il progetto originale e usare moduli Arduino, al posto dei moduli Theremino Master.
Per iniziare con qualcosa di semplice si può iniziare da un dito, come spiegato in questa pagina:
http://inmoov.fr/finger-starter
In questo link c’è la lista delle immagini con i particolari meccanici:
http://inmoov.fr/gallery-v2
E questa è la lista dei materiali, con consigli e spiegazioni :
http://inmoov.fr/default-hardware-map
Theremino Radar

Una interessante applicazione ideata da Mauro Riboni. Basata su un modulo a ultrasuoni di tipo HC-SR04, funziona sorprendentemente bene e fornisce un display molto simile a quello dei veri radar. Qui si vede un video di YouTube: http://youtu.be/FsW4qwXvpB4
Purtroppo i moduli a ultrasuoni limitano molto le caratteristiche. La distanza massima è di pochi metri e il raggio è largo più di 30 gradi. (ma nella pagina dei sensori sono indicati sistemi per stringerlo un po’) hardware/inputs/sensors#usound
Anche se la tecnologia a ultrasuoni è adatta solo per applicazioni didattiche o giocattoli, ugualmente la applicazione Theremino Radar è molto interessante, con piccole modifiche la si potrebbe adattare ai sensori a microonde o laser.
Costruzione meccanica
Un servocomando per aeromodelli direttamente pilotato da un PIN del ThereminoMaster, ruota il modulo a ultrasuoni di 180 gradi. Il segnale dell’eco è collegato direttamente a un secondo PIN del Master. Si consiglia di usare un servo di basse o medie prestazioni. L’unica richiesta è che sia un modello con escursione di 180 gradi. hardware/outputs/motors
Un modulo a ultrasuoni con ottime prestazioni, economico e facilmente reperibile su eBay, è lo HC-SR04. hardware/inputs/sensors#usound
Prototipi e consigli nel blog sulla robotica: /blog/robotics-and-cnc
Possibili sviluppi
I classici radar a microonde sono realizzabili ma lavorano a distanze di decine o centinaia di chilometri e quindi sono abbastanza inutili per la gran parte di noi.
Quello che servirebbe invece è misurare distanze fino a cento metri, con altissima precisione. C’è un falegname che sta attendendo da oltre 20 anni un dispositivo per misurare muri, soffitto, porte, finestre e rientranze, tutto in un colpo solo. Vorrebbe metterlo nel centro della stanza di un cliente, andare a prendersi un caffè, tornare a ricuperare i dati e andarsene a casa. Non siamo mai riusciti a farlo, ma oggi siamo di un passo più vicini. (naturalmente si parla di un oggettino che deve essere semplicissimo e costare poco… i sarchiaponi da 1000 dollari li lasciamo fare ad altri)
Ricerche per un sensore di distanza adeguato
L’unica tecnologia che può fornire la precisione richiesta è la misura di distanza a laser. Seguiremo questa pista… (vedere “Lidar a microimpulsi”, i chip MAX3086, i PulseLasers di Osram e anche questo interessante documento) Non siamo i soli a tentare questa strada, i migliori progettisti del DIY sono in caccia ma, per ora, i migliori tentativi sono arrivati solo a 1 o 3 dati al secondo.
Cerca, cerca, ci stiamo avvicinando… questi moduli costano poco (circa 60 Euro) e fanno fino a 100 campionamenti al secondo. Purtroppo hanno poca precisione (solo il 5%, nemmeno un cinquantesimo della precisione dei nostri ADC). E purtroppo non hanno una uscita immediatamente usabile e andranno completati con un piccolo PCB con un PIC. (ma attenzione… un piccolo PCB con un PIC da 8 pin, non un intero Arduino, che sarebbe sprecato e anche enorme per questo scopo). Analizzando meglio non è un “lidar a microimpulsi” quindi la precisione sarà sempre troppo scarsa per quel che vogliamo fare noi. Cercheremo ancora…
Mini Help
- La “Max dist” che si imposta nelle proprietà del PIN di tipo “Usund sensor”, nella applicazione HAL deve corrispondere alla scala che si imposta nel ThereminoRadar.
- Lo slot 1 viene usato per muovere il servo (impostare il suo PIN come Servo16)
- Lo slot 2 viene usato per leggere il sensore a ultrasuoni (impostare il PIN come “Usound sensor”)
- Nelle proprietà dello “Usound sensor” mettere “Response speed” = 100 e disabilitare “Remove errors”
Note sulle versioni
Versione 1.0 – Questa è la prima versione adattata al Theremino System dall’idea originale di Mauro Riboni (lo ringraziamo per averci concesso di usarla)
Versione 1.1 – Piccoli miglioramenti nel resize della finestra e sfondo di colore mimetico.
Versioni 1.2 e 1.3 – Corretti molti piccoli difetti nati durante il passaggio da XP a Windows-7/8.
Versione 1.4 – Eliminati i lampeggiamenti all’avvio.
Download di Theremino Radar – Versione 1.5
Theremino_Radar_V1.5
Theremino_Radar_V1.5_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino Spectrometer

In questa immagine, il modulo Master e i pezzi meccanici, rappresentano le possibilità di automazione, del sistema Theremino. Per costruire lo spettrometro il modulo Master non è necessario.
Questo strumento non dovrebbe mancare in nessun laboratorio. Con pochi Euro (e molta pazienza) si può costruire uno strumento incredibilmente preciso. Finalmente si può toccare con mano cosa sono i nanometri, senza farsi spennare a colpi di migliaia di Euro.

Questa è la nuova Versione 4 che contiene notevoli miglioramenti.
Per questa versione dovete ringraziare Stefano Marchetti che ha insistito, giorno dopo giorno, e mi ha fatto lavorare per mesi su questa unica applicazione. Stefano ha provato e riprovato ogni possibilità, con enorme pazienza e ha continuato a chiedere variazioni. Per me tutto questo lavoro su una unica applicazione è esagerato e alcune cose, come i centesimi di nanometro e i sessantamila valori nella scala verticale, sono solo preciso-manie. Per cui tenete presente che la precisione di questi apparecchi è di uno o due ordini di grandezza inferiore rispetto a queste precisioni illusorie.
Però ora la applicazione è effettivamente migliorata ed è anche una delle più curate e precise che abbiamo.
Quale spettrometro usare
 Costruire il proprio spettrometro è possibile ma ci vuole molto lavoro, esperienza e precisione. Per chi vuole andare sicuro, senza rischiare di passare mesi a regolare lenti e posizioni e magarli non riuscirci, consigliamo di comprare lo spettrometro Little Garden costruito da Lao Kang.
Costruire il proprio spettrometro è possibile ma ci vuole molto lavoro, esperienza e precisione. Per chi vuole andare sicuro, senza rischiare di passare mesi a regolare lenti e posizioni e magarli non riuscirci, consigliamo di comprare lo spettrometro Little Garden costruito da Lao Kang.
Questa non è pubblicità, Lao non ci ha pagato nulla, lo consigliamo perché lo consideriamo una buona soluzione per chi vuole avere uno spettrometro di buona qualità, senza perdere tempo a costruirlo e spendendo poco.
Qui trovate il canale di Lao Kang su YouTube e poi lo spettrometro lo potete trovare su Ali Express per poco più di 70 Euro.
Autocostruire lo spettrometro
Chi ha già un po’ di esperienza in queste cose potrebbe leggere la documentazione che abbiamo preparato e provarci.
La soluzione che consideriamo più promettente è di utilizzare una WebCam di ottima qualità, cioè la TOUPTEK ASTRO GPCMOS02000KMA, come spiegato nel file Construction_WebCam e un reticolo vero, come spiegato nel file Gratings. Questa soluzione è un po’ costosa (si va oltre i 100 Euro tra WebCam e reticolo, più un bel po’ di lavoro e di materiali vari) ma vi darebbe risultati eccezionali, anche superiori agli spettrometri professionali.
Una seconda scelta potrebbe essere di utilizzare una WebCam a colori economica. I risultati non saranno il massimo ma la costruzione anche in questo caso sarebbe abbastanza facile.
I veri esperti, temerari, e anche un po’ masochisti, possono pensare di provare le altre soluzioni che proponiamo nella documentazione. Secondo noi non otterrete risultati migliori che con le WebCam ma siete liberi di sperimentare e provarci. Eccoli in ordine crescente di difficoltà:
1 Sensori lineari con reticolo a diffrazione.
2 Sensori lineari Toshiba con reticolo a riflessione e specchi nei banchi Ocean Optics o B&W di recupero.
3 Sensori lineari Toshiba comprando reticoli e specchi e facendo da se il banco con la stampante della plastica.
Per la precisione esistono alcuni campi e analisi specialistiche dove i sensori lineari, montati in un banco con reticolo a riflessione e specchi, possono funzionare meglio, ed anche essere varie volte più luminosi della migliore WebCam. Per i particolari leggete la pagina “Banchi per analisi specialistiche” che si trova a pagina 5 del file “Theremino Spectrometer LinearSensors”.
Documentazione in formato PDF

Theremino_Spectrometer_Help_ENG
Theremino_Spectrometer_LightSources_ENG
Theremino_Spectrometer_Spectrums_ENG
Theremino_Spectrometer_Gratings_ENG
Theremino_Spectrometer_Technology_ENG
Theremino_Spectrometer_LinearSensors_ENG
Theremino_Spectrometer_Construction_WebCam_ENG
Theremino_Spectrometer_Construction_LinearSensor_ENG
![]()
Theremino_Spectrometer_Help_CHN
Theremino_Spectrometer_LightSources_CHN
Theremino_Spectrometer_Spectrums_CHN
Theremino_Spectrometer_Gratings_CHN
Theremino_Spectrometer_Technology_CHN
Theremino_Spectrometer_LinearSensors_CHN
Theremino_Spectrometer_Construction_WebCam_CHN
Theremino_Spectrometer_Construction_LinearSensor_CHN

Theremino_Spectrometer_Help_ITA
Theremino_Spectrometer_LightSources_ITA
Theremino_Spectrometer_Spectrums_ITA
Theremino_Spectrometer_Gratings_ITA
Theremino_Spectrometer_Technology_ITA
Theremino_Spectrometer_LinearSensors_ITA
Theremino_Spectrometer_Construction_WebCam_ITA
Theremino_Spectrometer_Construction_LinearSensor_ITA
Theremino_Spectrometer_OdtDocsV4 (documentazione OpenOffice per i traduttori)
Dalla versione 4 in poi la documentazione non si trova più nella cartella “Docs” della applicazione.
Questo ci permette di aggiornarla più frequentemente, anche senza cambiare versione alla applicazione.
Aggiungeremo messaggi di aggiornamento nella pagina delle News e in tal caso verrete qui a scaricarla.
Date una occhiata alla ultima pagina del file Theremino_Spectrometer_Gratings dove troverete un ottimo simulatore ottico.
– – – – – – –
Pubblicazioni varie
Leggete questa interessante pubblicazione che confronta i risultati del nostro apparecchio da 20 dollari con quelli di uno spettrometro commerciale “Ocean Optics USB4000 VIS-NIR” da oltre 3000 dollari.
Naturalmente le prestazioni non sono proprio le stesse, soprattutto se si lavora con scarsa luminosità. Ma con una illuminazione sufficiente i risultati sono sorprendentemente simili e la risoluzione è anche migliore.
Sul sito PhysicsOpenLab possono trovare altri test e utili informazioni
Su YouTube si possono trovare dei video che mostrano lo spettrometro in funzione
- Video di Chris Wesley sulla costruzione dello spettrometro.
- Video di Chris Wesley con i test su vari tipi di led.
- Video di Silvio s Beccara con un esempio di semplice costruzione dello spettrometro
- Video di Silvio s Beccara con esperimenti sui colori di vari oggetti
– – – – – – –
Note per le versioni
Versione 4.0
Questa versione contiene enormi miglioramenti, tra cui i più importanti sono:
– Scala verticale delle intensità.
– Calibrazioni multipunto (anche decine di punti e più)
– Informazioni di calibrazione (percentuale di errore e centesimi di nm).
– Aggiunta, rimozione e editing dei punti di calibrazione con il Mouse
– Interpolazione dei campioni dell’asse X.
– Interpolazione nel tempo con filtro IIR.
– Media aritmetica con filtro FIR.
– Riferimento migliorato.
– Sottrazione del fondo.
– Etichette con nanometri e frazioni fino ai centesimi.
– Dati delle etichette copiabili sulla clipboard.
– Il controllo di logaritmicità della scala verticale permette di evidenziare le punte o la zona inferiore.
– C’è una nuova finestra di informazioni che riassume tutti i parametri utilizzati e aiuta a calcolare i tempi di salita e discesa dei filtri.
– I file salvati contengono anche le informazioni sui parametri utilizzati.
– Si possono ricaricare i file salvati per visualizzarli nella finestra dello spettro, zoommarli e anche ricalibrarli e risalvarli.
– Si possono nascondere le opzioni poco usate per massimizzare la dimensione della finestra dello spettro.
– Tutte le funzioni della applicazione sono comandabili da altre applicazioni attraverso comandi testuali.
– – – – – – –
DOWNLOAD DELLA APPLICAZIONE
Downloads di Theremino Spectrometer – Versione 4.0
Theremino_Spectrometer_V4.0
Theremino_Spectrometer_V4.0_WithSources (versione per i programmatori)
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino OilMeter

Questo misuratore aiuta a conoscere l’olio extra vergine di oliva e a distinguerlo dagli oli contraffatti.
L’unico olio ben controllato dalla legge è l’olio extra vergine di oliva, sugli altri oli è come se ci fosse scritto “Sei tu che lo hai scelto, adesso sono cavoli tuoi.” Malgrado tutti i controlli, una buona metà delle bottiglie di olio extra vergine, contiene olio alterato o contraffatto. Cosa ci sarà nelle bottiglie di “non extra vergine”, dato che la legge non specifica le percentuali di quello che c’è dentro?


Per ora pubblichiamo la documentazione provvisoria (solo in italiano):
uploads/files/Theremino_OilMeter_TestMethods_ITA.pdf
uploads/files/Theremino_OilMeter_Hardware_ITA.pdf
uploads/files/Theremino_OilMeter_Help_ITA.pdf
uploads/files/Theremino_OilMeter_OliveOil_ITA.pdf
Download del circuito stampato in Formato Eagle (chi non avesse Eagle può trovare schema e stampato nella cartella delle immagini)
Sensor_OilMeter.zip
– – – – – – –
Downloads
Le versione da 1.2 a 1.4 sono sperimentali. Le pubblichiamo per i beta testers. Il funzionamento è completo e ben collaudato. Rimangono però dei dubbi sui messaggi di testo, che accompagnano la percentuale di “somiglianza”. Probabilmente i messaggi sono troppo specifici, e quindi la loro correttezza potrebbe essere obiettabile. Sperimentate, fateci sapere, e correggeremo.
Downloads di Theremino Oil Meter – Versione 1.4
Theremino_OilMeter_V1.4
Theremino_OilMeter_V1.4_WithSources (versione per i programmatori)
Theremino_OilMeter_V1.2_OdtDocs (documentazione OpenOffice per i traduttori)
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino DnaMeter
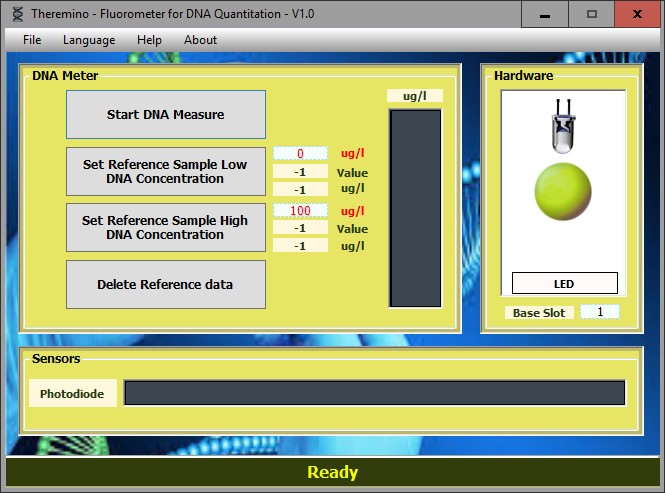
Fluorimetro per la Misura della concentrazione di DNA
La misurazione è basata sulla fluorescenza che alcune molecole coloranti acquisiscono, quando si legano alle molecole degli acidi nucleici. Aggiungendo al campione in esame, un quantitativo noto di colorante e misurando l’intensità della fluorescenza è possibile risalire alla concentrazione di acidi nucleici presenti nel campione.
Il prototipo di molecola colorante è il bromuro di etidio, che però è nocivo, essendo carcinogeno. Recentemente sono diventate disponibili altre sostanze che agiscono allo stesso modo, ma sono più sicure rispetto al bromuro di etidio. Nel nostro caso è stato adottato il colorante noto commercialmente come MidoriGreen.
Autori
Ana Rodriguez (MUSE)
Lodovico Lappetito (Theremino)
Documentazione (la stessa che si scarica con la applicazione):
Theremino_DNAMeter_ENG.pdf
Theremino_DNAMeter_ITA.pdf
Downloads di Theremino DNA Meter – Versione 1.1
Theremino_DnaMeter_V1.1
Theremino_DnaMeter_V1.1_WithSources (versione per i programmatori)
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Il DnaMeter è stato migliorato con la versione 1.2, seguite gli sviluppi sul sito physicsopenlab:
http://physicsopenlab.org/2016/04/15/fluorimetro-diy-per-misure-di-dna
Theremino Balance
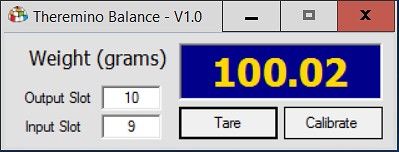
Questa applicazione legge il valore grezzo di uno Slot e effettua le operazioni di base di una bilancia di precisione (tara e calibrazione).
Il valore grezzo, letto dallo slot di ingresso, viene elaborato. Una media adattativa stabilizza le letture, poi vengono applicate la tara e la calibrazione. Infine il valore, convertito in grammi, viene visualizzato e scritto nello Slot di uscita, pronto per essere usato da altre applicazioni del sistema.
Tutta l’elaborazione si trova in poche righe, nel Form principale, per cui è facile fare modifiche come, ad esempio, aggiungere le unità di misura inglesi.
– – – – – – – –
 Abbiamo provato a leggere una cella di carico ricavata dalle bilance che si comprano per pochi euro su eBay. La cella di carico è stata collegata direttamente al Theremino Adc24 e il valore misurato è risultato molto stabile e preciso. Tanto da poter misurare perfettamente anche i centesimi di grammo, anche se la bilancia usata non era di grande qualità e leggeva solo i decimi.
Abbiamo provato a leggere una cella di carico ricavata dalle bilance che si comprano per pochi euro su eBay. La cella di carico è stata collegata direttamente al Theremino Adc24 e il valore misurato è risultato molto stabile e preciso. Tanto da poter misurare perfettamente anche i centesimi di grammo, anche se la bilancia usata non era di grande qualità e leggeva solo i decimi.
Per vedere come collegare le celle di carico, leggere il documento che si scarica da questa pagina:
https://www.theremino.com/hardware/inputs/sensors#loadcell
– – – – – – –
Download di Theremino Balance – Versione 1.1
Theremino_Balance_V1.1
Theremino_Balance_V1.1_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino BalanceReader


Questa applicazione non legge ogni genere di cella di carico attraverso gli Slot, come la precedente Theremino Balance, ma legge bilance commerciali, collegate alla porta seriale del PC.
Attualmente la applicazione legge le bilance ”HS-N” prodotte da “FUZHOU HENGZHAN ELECTRONIC CO.,LTD”. Sono bilance precise ed economiche, ottime per piccoli laboratori ed hanno un protocollo di trasmissione molto semplice.
Anche altri modelli di bilance, calibri elettronici e comparatori, hanno protocolli simili. Questa applicazione può quindi essere una base, da cui partire per collegare altri apparecchi di misura, al sistema Theremino. In questo esempio, il valore letto dalla bilancia (in grammi), viene continuamente scritto nello Slot 1.
Modificare questa applicazione è abbastanza facile. La lettura e la decodifica dei dati, in arrivo della Com Port (seriale RS232 o RS485), sono concentrati, in poco più di una pagina di codice, nel Form principale.
– – – – – – –
Download di Theremino BalanceReader – Versione 1.1
Theremino_BalanceReader_V1.1_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino PointFollower

Questa applicazione legge la immagine di una telecamera e individua la posizione del baricentro di un punto luminoso.
Questo modo di funzionamento è stato preparato per i telescopi, per centrare la finta stella prodotta da un laser. Ma lo stesso principio può essere utilizzato per molte applicazioni di controllo processo, nella produzione industriale e nelle applicazioni scientifiche.
Theremino PointFollower è la applicazione base per leggere e trattare un segnale video.
Per creare nuove applicazioni si consiglia di copiare questa applicazione, cambiarle nome e seguire queste istruzioni: downloads/notes-on-software#advices
– – – – – – –
Principio di funzionamento
Un valore di correzione viene inviato su due slot, i cui valori rappresentano il decentramento in orizzontale e verticale. Quando il punto è perfettamente centrato gli slot contengono il valore 500. Regolando opportunamente i parametri di inseguimento, si possono pilotare due servo motori multigiri.
Per informazioni sui motori leggere qui: hardware/outputs/motors
– – – – – – –
Note per le versioni
Versione 1.4 – Corretto un errore, che avveniva con alcune Webcam, su sistemi Windows7 a 64 bit.
Versione 1.5 – Eliminati i lampeggiamenti all’avvio.
Versione 1.6 – Eliminati i file CustomControlLib e DirectShow, ora sono dentro alla applicazione stessa.
Versione 1.7 – Corretto un errore che impediva l’apertura con alcune WebCam.
Download di Theremino PointFollower – Versione 1.7
Theremino_PointFollower_V1.7
Theremino_PointFollower_V1.7_WithSources (versione per i programmatori)
Theremino_PointFollower_V1.1_OdtDocs (documentazione OpenOffice per i traduttori)
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino VideoRecorder

Questa applicazione è solo un esempio, uno scheletro su cui costruire, non attendetevi la solita qualità e comodità delle altre applicazioni del sistema Theremino.
Sono implementate le parti fondamentali (audio, regolazioni della WebCam, compressione del video, impostazioni di risoluzione e frequenza dei fotogrammi, etc…) ma mancano le parti che servirebbero per salvare le impostazioni e ripristinarle quando si riavvia la applicazione e altre funzioni che potrebbero essere comode.
Download di Theremino VideoRecorder – Versione 0.2
Theremino_VideoRecorder_V0.2_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino VideoInspector
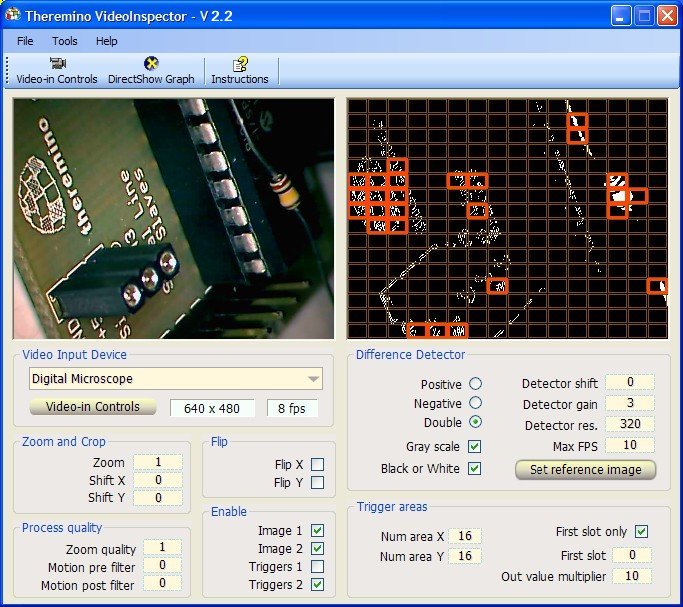
Il Video Inspector è stato progettato per individuare componenti mancanti sui circuiti stampati, durante il collaudo dei moduli del sistema Theremino.
Le funzioni di questa applicazione sono:
- Lettura del segnale video.
- Condizionamento del segnale.
- Estrazione delle differenze da una immagine di confronto.
- Scrittura dei valori di differenza negli “Slot”(1) del sistema Theremino.
(1) Video Inspector è un componente modulare del sistema Theremino quindi interagisce con gli altri componenti del sistema attraverso gli Slot.
Ispezione visuale dei PCB
Il controllo elettrico funzionale non evidenzia alcuni errori, ad esempio la mancanza del diodo di protezione sulla alimentazione, per cui una ispezione visuale è sempre necessaria. Purtroppo gli operatori umani dopo qualche centinaio di moduli cominciano a non funzionare più bene e tendono a “lamentarsi”. Questo programma non sostituisce l’operatore ma fornisce una indicazione di allarme e permette di lavorare molto più velocemente, senza stancarsi.
Per ottenere i migliori risultati si consiglia di usare telecamere ad alta risoluzione, illuminazione forte e molto ben diffusa e di provvedere un preciso meccanismo di posizionamento del PCB.
Applicazioni simili
Non solo il controllo dei PCB ma molte applicazioni di automazione possono avvalersi utilmente di questa applicazione. La lettura delle immagini e il riconoscimento sono implementati con cura e ottimizzati. Applicazioni che richiedono funzioni aggiuntive potrebbe appoggiarsi su questa base e aggiungere solo le parti mancanti.
– – – – – – –
Note per le versioni
Versione 1.9 – Corretto un errore, che avveniva con alcune Webcam, su sistemi Windows7 a 64 bit.
Versione 2.0 – Eliminati i lampeggiamenti all’avvio.
Versione 2.1 – Corretto il “First Slot” che non veniva ricaricato ad ogni avvio.
Ad ogni pressione del pulsante “Load reference image” la immagine di riferimento viene anche scritta su file.
Ad ogni accensione il file “ReferenceImage.png” viene ricaricato (se esiste e se è compatibile con la risoluzione scelta)
Versione 2.2 – Modificato il nome del pulsante da “Load reference image” a “Set reference image”, che è più adeguato.
Allineati i file di istruzione e le immagini per le variazioni introdotte nelle versioni 2.1 e 2.2
Versione 2.3 – Eliminati i file CustomControlLib e DirectShow, ora sono dentro alla applicazione stessa.
Versione 2.4 – Corretto un errore che impediva l’apertura con alcune WebCam.
Download di Theremino VideoInspector – Versione 2.4
Theremino_VideoInspector_V2.4
Theremino_VideoInspector_V2.4_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino VideoInput

Il Video Input è progettato per rilevare variazioni nelle immagini video (movement detection) provenienti da una telecamera.
Gli usi sono molteplici, dalla sorveglianza perimetrale agli antifurto, dal controllo di accesso alla rivelazione del passaggio di animali.
Anche classiche applicazioni industriali (ad esempio segnalare la mancanza di tappi sui barattoli) possono usare le funzioni di questa applicazione o della precedente applicazione “Video Inspector”
La possibilità di descrivere aree di interesse, anche sovrapposte, permette di specificare diversi tipi di allarme e di attenzione per le varie zone dell’immagine e di escludere le zone non significative o “rumorose” come le tende che si muovono per gli spostamenti d’aria.
Sullo stesso computer possono convivere molte applicazioni VideoInput, ognuna con la sua cartella i suoi parametri e la sua telecamera completamente indipendenti.
Le funzioni di questa applicazione sono:
- Lettura del segnale video
- Condizionamento del segnale
- Estrazione dei movimenti
- Scrittura dei valori di differenza negli “Slot”(1) del sistema Theremino
(1) Video Input è un componente modulare del sistema Theremino quindi interagisce con gli altri componenti del sistema attraverso gli Slot.
Applicazioni simili
Molte applicazioni di automazione possono avvalersi utilmente di questa applicazione. La lettura delle immagini e il riconoscimento dei movimenti sono implementati con molta cura e ottimizzati. Applicazioni che richiedono funzioni aggiuntive potrebbe appoggiarsi su questa base e aggiungere solo le parti mancanti.
– – – – – – –
Note per le versioniVersione 1.9 – Corretto un errore, che avveniva con alcune Webcam, su sistemi Windows7 a 64 bit. Versione 2.0 – Eliminati i lampeggiamenti all’avvio.
Versione 2.1 – Eliminati i file CustomControlLib e DirectShow, ora sono dentro alla applicazione stessa.
Versione 2.2 – Corretto un errore che impediva l’apertura con alcune WebCam.
Download di Theremino VideoInput – Versione 2.2
Theremino_VideoInput_V2.2
Theremino_VideoInput_V2.2_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino MicroViewer

Questa applicazione permette di ottenere il massimo da ogni Webcam o Microscopio digitale. Naturalmente se si parte da un dispositivo con 640 x 480 pixel nativi (come in questa immagine) la qualità sarà limitata.
Quando si acquista un dispositivo fare attenzione che sia almeno HD 720p (1280 x 720) o ancora meglio Full-HD 1080p (1920 x 1080) E attenzione a non farsi ingannare dai molti mega-pixel che vengono spesso dichiarati. I mega pixel interpolati dal software sono sempre molto maggiori della risoluzione reale dell’hardware, ma si deve individuare la vera risoluzione, che purtroppo spesso è la solita misera 640 x 480.
Questo software è nato per copiare diapositive con un “OVT-Scanner”, e potrebbe ancora essere usato per quell’uso, ma è stato ampliato con le funzioni di zoom che permettono di usarlo come microscopio e ottenere il massimo ingrandimento e qualità possibile da ogni WebCam. Per l’uso come scanner di diapositive leggete le istruzioni allegate con il programma, contengono molti consigli utili.
Usare le WebCam come microscopio
Molte WebCam, anche poco costose, hanno l’obiettivo svitabile per mettere a fuoco da vicino. Con alcune di esse, svitando molto l’obiettivo, si riesce a mettere a fuoco a pochi millimetri e si ottiene un ottimo microscopio. Se si parte da una WebCam HD o FullHD i risultati saranno ancora migliori.
– – – – – – –
Versione 1.2 – Corretti alcuni errori. Principalmente un errore in apertura che mandava in crash la applicazione con alcuni modelli di WebCam.
Versione 1.3 – Il controllo dei parametri della WebCam è molto migliorato, ora funzionano anche i parametri più esotici come il fuoco (per le webcam che ne dispongono).
Versione 1.4 – Corretto un errore che poteva, in rari casi, provocare il blocco della applicazione.
Versione 1.5 – Corretto un errore, che avveniva con alcune Webcam, su sistemi Windows7 a 64 bit.
Versione 1.6 – Assicurato il funzionamento anche su PC, dove non si riesce a fare il test della CPU.
Versione 1.8 – Aggiunta la possibilità di ingrandire la immagine con doppio click sulla immagine.
Versione 1.9 – Corretto un difetto che, su alcuni computer, impediva di salvare le immagini con “Double resolution”.
Versione 2.0 – Aggiunto uno Slot di automazione, per salvare l’immagine su file. L’immagine viene scritta quando lo Slot supera il valore 500. Per salvare una nuova immagine si deve “riarmare” il meccanismo, riportando lo slot a zero per qualche millisecondo.
Versione 2.1 – Ulteriori piccole correzioni, tra cui il JPEG quality che non funzionava bene.
Versione 2.2 – Aggiunto il cursore a croce per centrare i fori e fare lo zero pezzo con ThereminoCNC.
Versione 2.3 – La versione 2.2 non funzionava più sui sistemi a 64 bit (perché era compilata con “AnyCpu” al posto che “X86”), ora questo problema è risolto.
Versione 2.4 – Eliminati i lampeggiamenti all’avvio.
Versione 2.6 – Eliminati i file CustomControlLib e DirectShow, ora sono dentro alla applicazione stessa. Aggiunta la possibilità di fare doppio click sulla immagine e portarla a tutto schermo. Il cursore del mouse sparisce dopo due secondi se l’immagine è a tutto schermo. Eliminato un errore che mandava in crash la applicazione con zoom diverso da uno e chiudendola mentre era minimizzata.
Versione 2.7 – Corretto un errore che impediva l’apertura con alcune WebCam.
Download di Theremino MicroViewer – Versione 2.7
Theremino_MicroViewer_V2.7
Theremino_MicroViewer_V2.7_WithSources (versione per programmatori)
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino MicroVideo
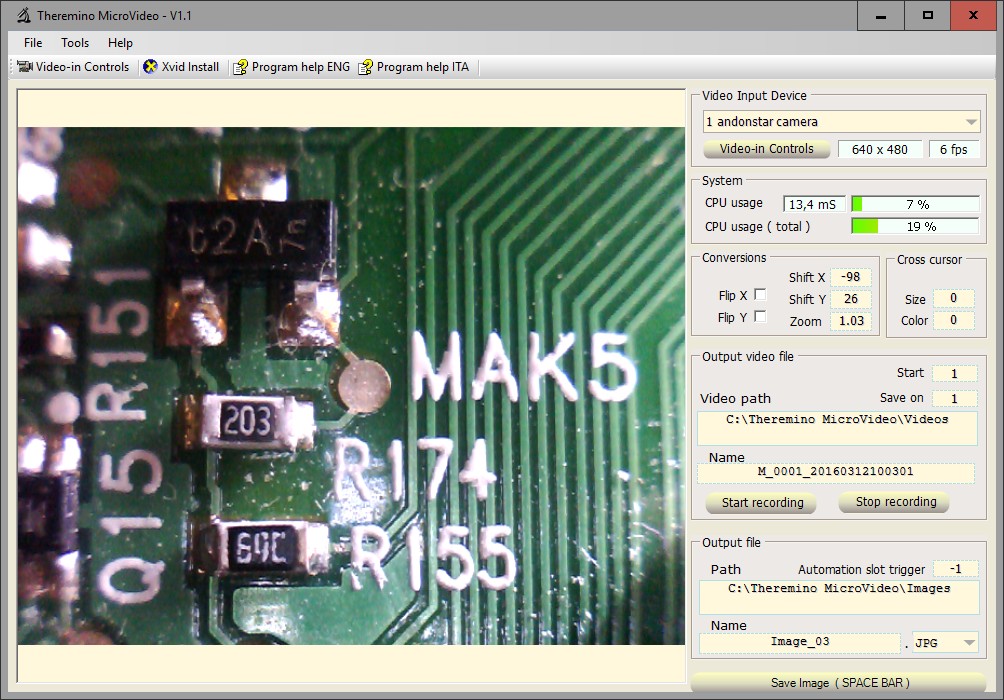
Questa applicazione è molto simile a MicroViewer, ma può anche registrare il video. Inoltre può avviare la registrazione e fermarla, tramite comandi esterni (attraverso gli Slot).
Non si tratta di una delle solite applicazioni che, quando si preme “Start”, ci mettono due secondi a iniziare la registrazione, ma di un vero strumento scientifico di precisione.
Con “Start” la registrazione inizia istantaneamente e con “Stop” si ferma istantaneamente. Quindi è possibile, ad esempio, posizionarla in una macchina utensile, e documentare eventi rari, che altrimenti sarebbero difficili da cogliere. Oppure filmare il passaggio di animali che si muovono velocemente. O anche effettuare esperimenti scientifici, che richiedono una precisa corrispondenza tra i fotogrammi e il tempo reale.
Queste incredibili caratteristiche sono state sviluppate da Nick, un ingegnere cinese molto preparato. Senza di lui non avremmo mai potuto realizzare questa applicazione.
Il formato di registrazione XVID
I file delle registrazioni vengono compressi nel formato XVID, l’unico formato che permette un preciso controllo della temporizzazione dei singoli fotogrammi.
Se XVID non è già presente nel sistema, lo si può installare facilmente, con il pulsante “XVID Install”, che si trova nella parte superiore della applicazione.
Gli Slot di comando della registrazione
Nelle caselle “Start” e “Save on” si imposta un numero di Slot. Questo numero può essere “-1”, se si vuole disabilitare la funzione, oppure da 0 a 999 per indicare quale Slot utilizzare.
Se si tengono tutte e due con lo stesso numero di slot, ad esempio “1”, quando il valore dello slot supera il 500 inizia la registrazione. Poi, quando scende sotto a 500, la registrazione si ferma.
La applicazione è in via di completamento e in questo momento non sappiamo come mai ci siano due caselle, probabilmente diventeranno una sola. Se volete informazioni più precise, o avete dei problemi da risolvere, scrivete direttamente a Nick che ha scritto il software di registrazione e ne conosce i particolari.
Nick = goodluckyuming@126.com
(potete scrivergli sia in inglese che italiano, tanto lui traduce tutto in cinese)
– – – – – – –
Versione 1.1 – Questa è la prima versione pubblicata, ha ancora qualche difetto ma si può già usare.
Versioni 1.3, 1.4 – Migliorata la stabilità.
Versioni 1.5, 1.6 – Migliorata la stabilità e aggiunta la possibilità di controllare lo Zoom con uno Slot.
Download di Theremino MicroVideo – Versione 1.6
Theremino_MicroVideo_V1.6
Theremino_MicroVideo_V1.6_WithSources (versione per programmatori)
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino ImgToGcode

Il RobotArm e altre applicazioni di automazione possono avvalersi utilmente di questa piccola utility che converte una immagine in Gcode.
Le dimensioni in millimetri del Gcode generato sono le stesse della immagine da cui proviene (modificabili nei programmi di fotoritocco)
– – – – – –
ImgToGcode andrebbe completato nelle parti seguenti:
Le due funzioni di scheletrizzazione con algoritmo “Rosenfeld” andrebbero ridotte una sola ma per ora le teniamo divise perché in alcuni casi va meglio la prima e in altri la seconda (principalmente sui bordi della immagine) Per evitare errori sui bordi è sempre meglio usare immagini con almeno un pixel di bordo bianco tutto intorno.
Il bottone Resize che ora riduce alla dimensione attuale della finestra andrebbe sostituito con la possibilità di impostare le dimensioni in pixel e quelle finali in millimetri.
– – – – – –
ImgToGcode si usa così
- LoadImage – Di una immagine composta da TRATTI (non un paesaggio)
- Rosenfeld – Per scheletrizzare i contorni
- Vectorize – Per produrre il GCode (e visualizzarli con programma associato ai file GC)
Se i file GC non sono associati a un programma di visualizzazione, Windows emette un errore. Per evitare questo errore, associarli a Notepad o a un programma di visualizzazione adatto, ad esempio Metacut. Comunque anche con questo errore, il file GC viene ugualmente generato e lo si trova nella cartella delle immagini di origine.
Download di Theremino ImgToGcode – Versione 1.5
Theremino_ImgToGcode_V1.5
Theremino_ImgToGcode_V1.5_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
– – – – – –
Theremino ImgToGcode – Versione 1.9
Questa nuova versione ha così tante nuove opzioni che qualcuno potrebbe trovare difficile usarla. Abbiamo quindi deciso di non sostituire la precedente versione.

Se si usano le impostazioni di questa immagine, la nuova versione si comporta approssimativamente come la precedente e genera files adatti al Theremino Arm.
Con le nuove regolazioni è possibile stabilire la risoluzione, le dimensioni di uscita, e la profondità di incisione, in relazione con i livelli di grigio della immagine. Con questa versione si possono generare G-Codes per la fresa a tre assi. Si possono fare basso rilievi, circuiti stampati, incisioni, targhe e pezzi meccanici.
Piccole istruzioni dall’alto in basso:
- Load image – Carica una nuova immagine. Nella cartella “media” e nelle sue sotto cartelle sono disponibili molte immagini al tratto e immagini di prova. Salire di un livello fino a “media” e scendere nelle sotto cartelle.
- Reload image – Ricarica la immagine eliminando la eventuale scheletrizzazione.
- Original res. – Informa quale era la risoluzione originale della immagine (larghezza in pixel)
- Resolution – Stabilisce la risoluzione della immagine che viene usata nel programma (larghezza in pixel). Ridurre la risoluzione per generare lavorazioni più veloci. Oppure si aumenta la risoluzione, per migliorare la qualità, a discapito del tempo di lavorazione.
- Blur – Trasforma le transizioni tra bianco e nero, in un’area con tutti i livelli intermedi di grigio. Una regolazione adeguata di questo parametro, in congiunzione con i parametri Threshold e WeightedDown, può generare bassorilievi e altri effetti interessanti.
- Rosenfeld – Due tipi leggermente diversi di “scheletrizzazione”. Immagini al tratto vengono trasformate in linee singole e si ottiene una grande riduzione dei tempi di lavorazione finali. I tipi “1? e “2? sono quasi identici, hanno solo piccole differenze sui bordi. Quando si usa Rosenfeld è bene usare la Vectorization di tipo “Follow borders” e disabilitare “Wighted down”
- Threshold – Il livello oltre al quale la immagine viene considerata “bianca”. Il massimo valore è 254 e vuol dire di tener conto di tutti i livelli di grigio. Abbassando questo valore, si perdono tutti i dettagli chiari e la lavorazione diventa più rapida.
- Weighted down – Se si abilita questa casella la altezza di lavorazione (asse Z) viene modificata dai livelli di grigio della immagine. Andando dal bianco al nero, il livello varierà da zero al valore in millimetri, stabilito da “Down”. Se questa casella è disabilitata, allora il livello “Down” viene usato per tutte le zone non bianche (più scure di Threshold)
- Parallel vertical – Lavorazione a righe verticali. Si usa per immagini con larghe aree e per bassorilievi, in congiunzione con “Blur”, “Weighted down” e con “Threshold” molto alto (normalmente 254).
- Parallel horizzontal – Lavorazione a righe orizzontali. Si usa per immagini con larghe aree e per bassorilievi, in congiunzione con “Blur”, “Weighted down” e con “Threshold” molto alto (normalmente 254).
- Follow borders – Lavorazione che segue i contorni delle zone scure (al di sotto di Threshold). Si usa principalmente per immagini con linee singole (che sono state scheletrizzate con Rosenfeld). Questo tipo di lavorazione è il migliore per generare i GCodes per RobotArm, ma è usabile anche con la fresa, per fare circuiti stampati. Generalmente se si usa FollowBorders si disabilita “Weighted down”.
- Width (mm) – Larghezza in millimetri della lavorazione.
- Height (mm) – Altezza in millimetri della lavorazione.
- Use image aspect – Se abilitato, mantiene costante il rapporto tra larghezza e altezza.
- Use image size – Se abilitato, le dimensioni di lavorazione sono stabilite, dalle dimensioni di stampa, della immagine stessa.
- Up (mm) – Livello di lavorazione alto. Impostarlo abbastanza alto da evitare che la punta tocchi il materiale da lavorare, durante gli spostamenti rapidi. Se si esagera si aumenta il tempo di lavorazione.
- Down (mm) – Livello di lavorazione basso. Impostarlo a seconda della profondità di incisione desiderata. Attenzione che la fresa deve poter tagliare lateralmente, per tutta la profondità di incisione. Se si esagera la fresa potrebbe rompersi. Il software non controlla questo tipo di errori. Quindi prima di avviare la fresa, controllare con un programma adatto, ad esempio Metacut.
- Tool size (mm) – Diametro della fresa. Per lavorazioni di precisione usare frese di piccolo diametro (anche fino a 0.3 mm) e aumentare la “Resolution”. Usare frese di piccolo diametro aumenta moltissimo il tempo di lavorazione e aumenta il rischio di rotture.
- Feed (mm/m) – Velocità di avanzamento durante la lavorazione. Con frese molto piccole è bene abbassarla, per ridurre il rischio di rotture.
- Rapids (mm/m) – Velocità di avanzamento durante i movimenti rapidi. Si dovrebbe impostare un valore uguale alla massima velocità della macchina. Con valori più bassi si rallenta la lavorazione. Con valori troppo alti, la macchina stessa limita la velocità e il tempo di lavorazione viene calcolato male.
I file GCode possono essere esplorati anche con Wordpad o Notepad. Nelle prime righe c’è una riga che inizia con MCUSTOCK. In questa riga si possono leggere le dimensioni di lavorazione in millimetri. Alla fine del file GCode c’è un blocco di dati, con il tempo approssimativo di lavorazione.
Quando si preme “Create GCode” Windows può segnalare che i file Gcode non sono associati a un programma di visualizzazione. Per evitare questo messaggio, associare i file GCode (con estensione GC) a Notepad, Wordpad o meglio a un programma di visualizzazione apposito per i GCode (ad esempio Theremino CNC).
Comunque, anche se viene emesso il messaggio di errore, il file GC viene sempre generato e lo si trova nella cartella delle immagini, accanto alla immagine da cui è stato generato.


Se si installa un programma adatto, si possono vedere le lavorazioni, altrimenti si immaginano. Un programma adatto per vedere i file Gcode potrebbe anche essere ThereminoCNC (che però ha una visualizzazione in tre dimensioni piuttosto semplice).
– – – – – –
Note per le versioni
Versione 1.9 – Ora la applicazione si apre senza errori, anche senza immagine. Inoltre se la immagine non ha il percorso giusto, viene cercata per nome, nella cartella delle immagini di esempio.
Versione 2.0 – Migliorato il calcolo del tempo e aggiunto il pulsante “View vectorized” che rende più comodo l’utilizzo della applicazione.
Download di Theremino ImgToGcode – Versione 2.0
Theremino_ImgToGcode_V2.0
Theremino_ImgToGcode_V2.0_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino ImgGreyscaleToGcode
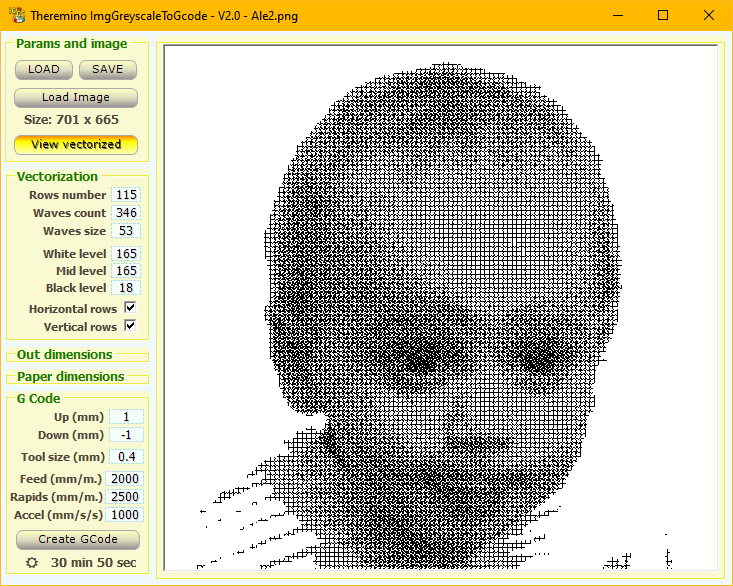
Questa applicazione riesce a simulare i toni di grigio con un utensile che non potrebbe farlo, ad esempio una fresa o una penna a inchiostro.
I comandi sono semplici da usare perché si vede immediatamente l’effetto di ogni variazione. Il tempo viene mostrato in basso e si deve cercare di mantenerlo breve.
Quando si preme “Create GCode” Windows può segnalare che i file Gcode non sono associati a un programma di visualizzazione. Per evitare questo messaggio, associare i file GCode (con estensione GC) a Notepad, Wordpad o meglio a un programma di visualizzazione apposito per i GCode (ad esempio Theremino CNC).
Comunque, anche se viene emesso il messaggio di errore, il file GC viene sempre generato e lo si trova nella cartella delle immagini, accanto alla immagine da cui è stato generato.
– – – – –
Download di Theremino ImgGreyscaleToGcode – Versione 2.0
Theremino_ImgGreyscaleToGcode_V2.0
Theremino_ImgGreyscaleToGcode_V2.0_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino GcodeToImage

Questa applicazione trasforma un file vettoriale (per ora solo i GCODE ma in futuro anche DXF e WMF) in una immagine (BITMAP, JPEG, PNG, TIFF etc..)
La conversione da vettori a immagine (Vector to Raster), è necessaria per le macchine che non possono leggere, le immagini vettoriali (Laser Cutter, Engraving e macchine simili). Esistono programmi che fanno queste conversioni, ma sono difficili da usare, lenti da installare e costosi.
– – – – – – –
Note per le versioni
Versione 0.1 – In questa prima versione la lettura dei GCode è approssimativa e molto probabilmente alcuni GCode verranno interpretati male. Qualche anima pia dovrebbe sostituire la lettura dei GCode con quella di Theremino CNC, ma purtroppo questo è un lavoro difficile che solo un bravo programmatore potrebbe fare. Con GCode semplici questa applicazione funziona bene e può essere molto utile.
Download di Theremino GcodeToImage – Versione 0.1
Theremino_GcodeToImage_V0.1
Theremino_GcodeToImage_V0.1_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino ImgToVectors
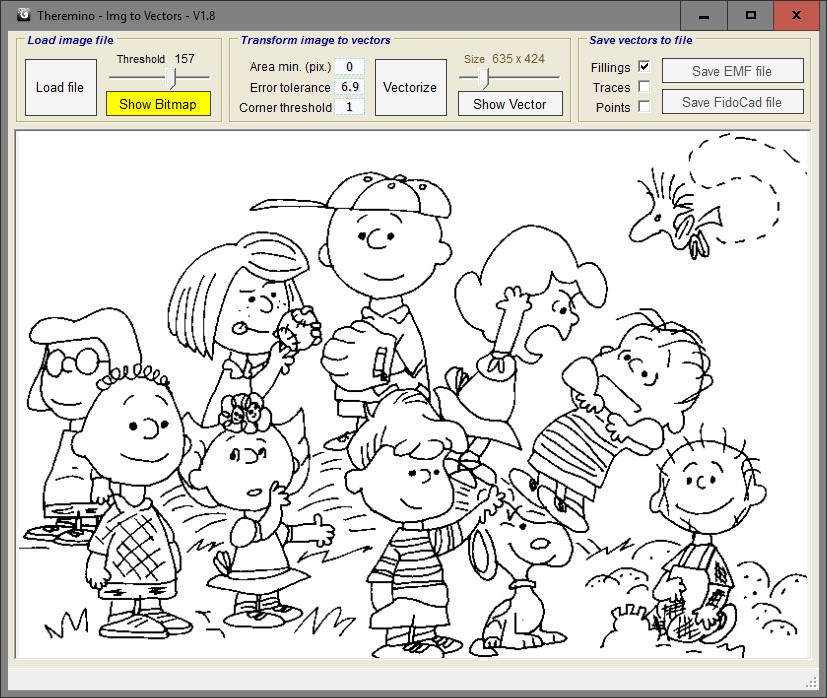
Questa applicazione trasforma le immagini (JPG, PNG e simili) in vettori. E’ una operazione difficile e questa è una delle poche utility gratuite che lo fanno (come alternativa si potrebbe usare WinTopo che però non è Open Source).
Dalla versione 1.8 abbiamo introdotto la possibilità di salvare le immagini vettoriali anche in formato Fidocad.
Istruzioni brevi
I comandi sono pochi ed è abbastanza facile usarli. Si consiglia di fare varie prove per individuare la migliore combinazione dei parametri che, purtroppo, cambia molto da una immagine all’altra.
- Load file – Permette di caricare una nuova immagine da convertire.
- Threshold – In genere va abbassato fino a ottenere linee sottili ma senza che le linee perdano la continuità e si creino delle interruzioni.
- Show bitmap – Premere questo pulsante per vedere l’immagine originale.
- Area min – Aumentandolo si escludono i particolari piccoli per minimizzare e rendere più pulito il file di uscita. Dopo averlo modificato si deve premere nuovamente “Vectorize” altrimenti i pulsanti “Save” sono disabilitati.
- Error tolerance – Aumentandolo si producono linee con meno punti intermedi, per minimizzare e rendere più pulito il file di uscita. Dopo averlo modificato si deve premere nuovamente “Vectorize” altrimenti i pulsanti “Save” sono disabilitati.
- Corner threshold – Determina il massimo angolo oltre al quale le curve si spezzano. Si consiglia di tenerlo circa a uno. Dopo averlo modificato si deve premere nuovamente “Vectorize” altrimenti i pulsanti “Save” sono disabilitati.
- Vectorize – Esegue la trasformazione da immagine a vettori.
- Size – Determina la dimensione in pixel della immagine di uscita. Si consiglia di tenerlo più basso possibile, compatibilmente con la qualità richiesta. Immagini FidoCad molto grandi possono diventare difficili da trattare e FidoCad non ha poi funzioni per ridimensionarle.
- Show vector – Premendolo mostra la immagine vettorizzata. Lo si usa solo se si è prima premuto “Show bitmap”, altrimenti viene premuto automaticamente ad ogni conversione.
- Fillings – Produce e mostra aree riempite. Abilitando questo controllo i file FidoCad contengono aree convertite nella primitiva Spline di FidoCad.
- Traces – Produce e mostra contorni. Questa abilitazione non produce differenze sui file FidoCad.
- Points – Produce e mostra aree riempite. Questa abilitazione non produce differenze sui file FidoCad.
- Save EMF file – Produce un file vettoriale di tipo EMF (Enhanced Meta File – il successore dei Windows Meta File).
- Save FidoCad file – Produce un file vettoriale di tipo FCD (FidoCad o FidoCadJ).
Importante non esagerare con le dimensioni della immagine (in pixel) e con la sua complessità, altrimenti il tempo di conversione potrebbe crescere a dismisura. Si consiglia anche di mantenere basso il cursore “Size”, per non produrre immagini EMF o file FidoCad troppo grandi.
Consigli per le aree di FidoCad
Le aree sono trasparenti e sono tutte grigie. In questo modo si riesce a vederle anche quando sono sovrapposte. E quindi si possono selezionare una per una e ricolorarle manualmente.
Le aree vengono convertite nella primitiva Spline di FidoCad che ha un limite al numero di punti per la singola area. Pertanto se l’area è grande e complessa accade che se ne perde una parte. Questo problema non era sentito quando si disegnava a mano ma partendo da immagini succede facilmente.
Una piccola riduzione del numero di punti si può ottenere aumentando “Error tolerance” ma questo comporta anche un peggioramento dei bordi dell’area. Per ottenere i migliori risultati l’unica soluzione valida è ritoccare la immagine con un programma di disegno e facilitare la conversione. Fare particolarmente attenzione ai bordi delle aree che si collegano ad altri oggetti, ad esempio alla linea dell’orizzonte. Separarle con piccole interruzioni in modo logico e chiudere bene tutte le aree che interessano.
Si possono trovare altri consigli ed esempi in questo articolo:
http://www.electroyou.it/theremino/wiki/un-regalo-di-capodanno-per-gli-amanti-di-fidocad
– – – – – – –
Note per le versioni
– Versione 1.8 –
– In questa versione abbiamo introdotto la possibilità di creare file FidoCad (estensione FCD).
– I comandi sono disposti in modo più ordinato.
– Le funzioni di conversione sono migliorate e gran parte del codice è già pronto per la versione 1.9 che produrrà files FidoCad anche con aree che potranno essere colorate con l’editor di FidoCad.
– Versione 2.0 –
– In questa versione abbiamo aggiunto la possibilità di convertire aree nella primitiva Spline di FidoCad.
– – – – – – –
Download di Theremino ImgToVectors – Versione 2.0
Theremino_ImgToVectors_V2.0
Theremino_ImgToVectors_V2.0_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino Pad

Questa applicazione muove il cursore del mouse sullo schermo, in una posizione determinata dal valore di due Slot.
Un interessante sviluppo di questa applicazione, sarà di leggere quattro Slot, collegati a quattro CapsSensor, con le antenne sui quattro lati di un rettangolo. Questo permetterà di creare un “PAD” (come i tappetini dei notebook) che sente anche la posizione verticale del dito. Lo scopo finale è di farlo funzionare dietro al vetro delle vetrine dei negozi. Sono vetri molto spessi e attualmente sarebbe l’unica tecnologia funzionante in quelle condizioni. Esistono apparecchi commerciali, ma costano moltissimo e con i vetri spessi non funzionano bene.
– – – – – – –
Download di Theremino Pad – Versione 1.3
Theremino_Pad_V1.3
Theremino_Pad_V1.3_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino ReleSequencer
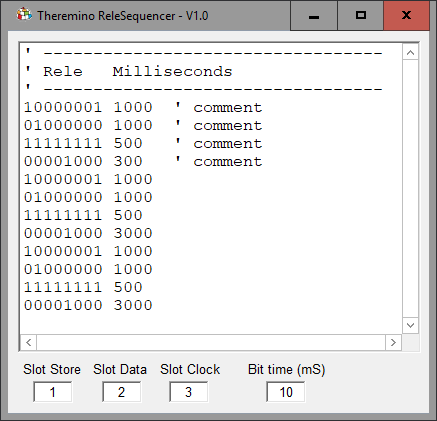
Con questa piccola applicazione si possono creare sequenze per pilotare relè, o segnali di uscita generici con cui pilotare ogni genere di attuatori di tipo acceso/spento.
I segnali di uscita vanno su tre Slot collegati alle schede Relè Switcher. Ogni scheda pilota fino a otto relè e le schede possono essere collegate in cascata per pilotare un gran numero di relè (o uscite generiche).
La particolarità di questa soluzione è di poter pilotare un gran numero di uscite, anche a grande distanza, utilizzando solo tre Pin di uscita di un Master, o di un Arduino, o di un NetModule.
Istruzioni per scrivere la sequenza
Le uscite vengono commutate tutte contemporaneamente quando viene eseguita la riga.
Nella parte sinistra di ogni riga si utilizzano degli zeri per indicare un relè spento e degli uni per indicare un relè acceso. Il numero di zeri e uni corrisponde al numero di relè da pilotare, in questa immagine sono otto ma si possono aumentare a piacere.
Il secondo numero di ogni riga sono i millisecondi di durata. Per cui se si scrive 1000 la riga avrà una durata di un secondo prima di passare alla riga seguente.
Nella parte destra, dopo all’apice singolo, si possono scrivere commenti.
Istruzioni per gli Slot e il Bit time
I tre Slot in basso devono corrispondere agli ingressi dei segnali della scheda Relè Switcher.
Il Bit time è la durata di ogni bit nella trasmissione seriale dei dati. Solitamente questo tempo non va variato da 10 mS, ma si potrebbe provare a ridurlo nel caso si volessero pilotare un gran numero di relè. Attenzione però che si potrebbero avere errori di trasmissione. Probabilmente, per stare sul sicuro, se i relè non sono più di 16 o 32, sarebbe meglio aumentarlo a 20 o 30 mS. Il tempo totale di trasmissione sono questi millisecondi moltiplicati per il numero di relè. Per cui se si pilotano, ad esempio, 16 relè e si imposta un tempo di 20 mS, il minimo tempo impiegato per passare da una linea di dati alla seguente sarà di 320 millisecondi. Cioè un terzo di secondo.
Download di Theremino ReleSequencer – Versione 1.0
Theremino_ReleSequencer_V1.0
Theremino_ReleSequencer_V1.0_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino DopplerMeter
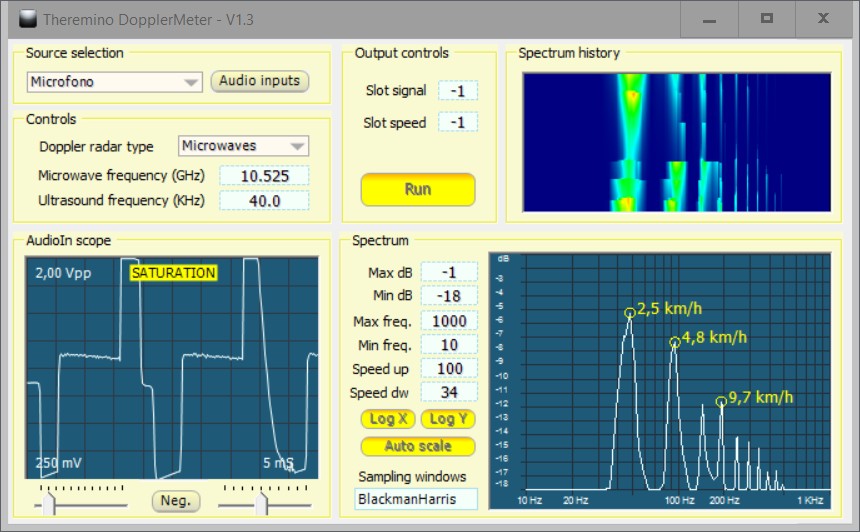
Questa applicazione misura la velocità di movimento di oggetti, per mezzo di sensori a microonde o ultrasuoni.
Campi di applicazione
- Rilevazione di persone e animali (antifurti, accendere luci, aprire porte, scattare fotografie)
- Misurare la velocità di uccelli, droni, missili e aeromodelli.
- Misurare la velocità di automobili, biciclette, sciatori, paracadutisti, atleti, ecc…
- Misurare la velocità di caduta e la densità di pioggia, grandine e neve.
Per i fenomeni meteorologici (pioggia, grandine e neve) la analisi di spettro fornisce:
- La velocità media delle particelle in caduta (il picco più alto)
- Lo spettro delle velocità e quindi dei diametri delle particelle, per pioggia e grandine
- Lo spettro delle densità, per i fiocchi di neve
Velocità approssimative di caduta per alcuni fenomeni meteorologici
- Velocità delle gocce di pioggia
- Diametro 6 mm: 36 Km/h (10 m/s)
- Diametro 5 mm: 32 Km/h (9 m/s)
- Diametro 0.5 mm: 7 Km/h (2 m/s)
- Velocità dei chicchi di grandine
- Diametro 60 mm: 126 Km/h (35 m/s)
- Diametro 40 mm: 100 Km/h (28 m/s)
- Diametro 20 mm: 72 Km/h (20 m/s)
- Diametro 10 mm: 54 Km/h (15 m/s)
- Diametro 5 mm: 36 Km/h (10 m/s)
- Velocità dei fiocchi di neve asciutta
- Fiocchi grandi: 10 Km/h (3 m/s)
- Fiocchi medi: 7 Km/h (2 m/s)
- Fiocchi piccoli: 2 Km/h (0.6 m/s)
- Velocità dei fiocchi di neve bagnata
- Fiocchi grandi: 15 Km/h (4.1 m/s)
- Fiocchi piccoli: 5 Km/h (1.4 m/s)
Tipi di analisi e sensori
Per mezzo della analisi di spettro del segnale si ottengono contemporaneamente le velocità di tutti gli oggetti in movimento. Questo tipo di funzionamento non si lascia ingannare, dai movimenti di oggetti multipli, come invece fanno gli apparecchi portatili con un singolo display.
I radar a microonde sono reperibili su eBay per pochi Euro e quelli a ultrasuoni sono costruibili con le normali capsule da 40 KHz.
I sensori a ultrasuoni sono altrettanto costosi di quelli a microonde, ma inferiori come prestazioni. Inoltre non attraversano la plastica, che è una comoda protezione contro le intemperie. Quindi per ora abbiamo progettato solo con i sensori a microonde.
Per costruire un semplice ed economico radar doppler a microonde leggere qui:
https://www.theremino.com/hardware/adapters#doppler
– – – – – – –
Download di Theremino DopplerMeter – Versione 1.5
Theremino_DopplerMeter_V1.5
Theremino_DopplerMeter_V1.5_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino WiFi

Questa applicazione misura l’intensità dei segnali WiFi e mostra le caratteristiche delle reti.
Osservando l’intensità dei segnali e i canali usati dalle altre reti, si può individuare il canale migliore da utilizzare per il proprio access point.
Scegliendo la visualizzazione della prossima immagine, che mostra l’andamento dei segnali nel tempo, si possono direzionare le antenne per migliorare il collegamento.
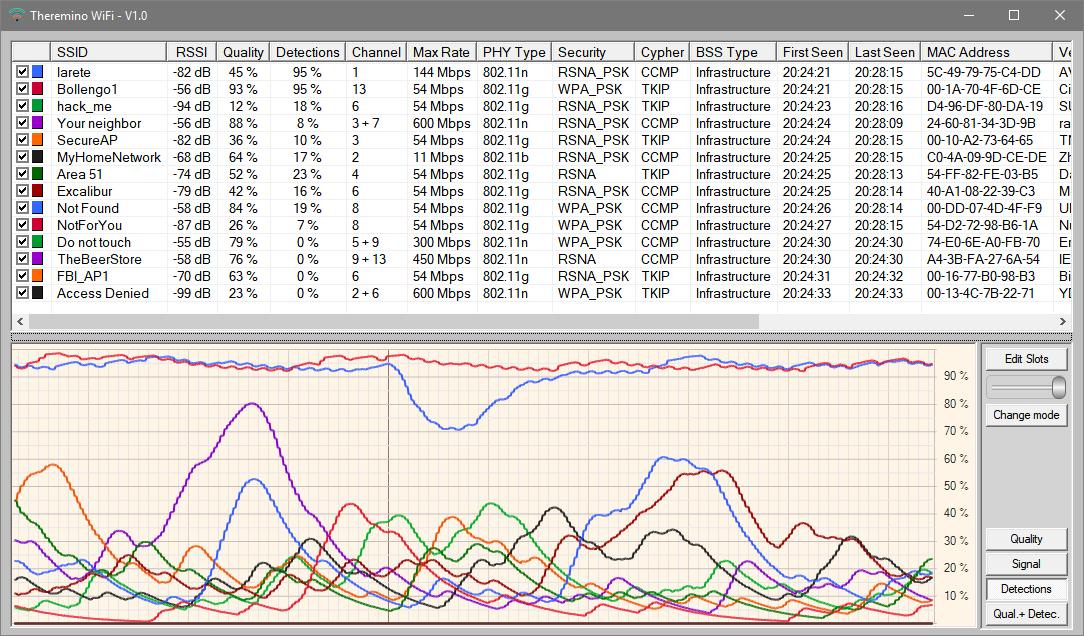
Le reti di queste immagini contengono dati poco realistici, sono create dalla applicazione stessa
per facilitare le prove (per crearle si compila in debug e si preme CTRL-SHIFT o CTRL-ALT).
ATTENZIONE : Questa applicazione è progettata per regolare le antenne e per esplorare le reti con una risposta più veloce possibile. Durante il suo funzionamento la scansione continua delle frequenze WiFi disturba e rallenta notevolmente il traffico di dati sul dispositivo dove è in esecuzione. Quindi non mantenetela aperta durante l’uso normale della rete. Utilizzatela solo durante le misure e poi chiudetela.
– – – – – – –
Inviare i valori misurati agli Slot
Premendo “Edit Slots” si apre il file di configurazione che permette di inviare i valori misurati verso gli Slot del sistema Theremino. I valori di intensità dei segnali, la qualità dei segnali e la frequenza con cui ogni segnale viene individuato, saranno quindi disponibili per le altre applicazioni del sistema. Si potranno quindi tenere sotto controllo le reti e anche costruire sistemi di automazione Ad esempio si potrebbe ruotare una antenna e individuare la posizione di massimo segnale.
Nel file di configurazione si scrivono i nomi (SSID) delle reti che interessano e i numeri degli Slot a cui inviare il valore misurato.
– – – – – – –
Note per le versioni
Versione 1.3
– Eliminato un errore che accadeva alla apertura della applicazione.
– Questa versione legge anche i canali superiori al 14 (banda 5 GHz).
– – – – – – –
Download di Theremino WiFi – Versione 1.3
Theremino_WiFi_V1.3
Theremino_WiFi_V1.3_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino SignalDecoder
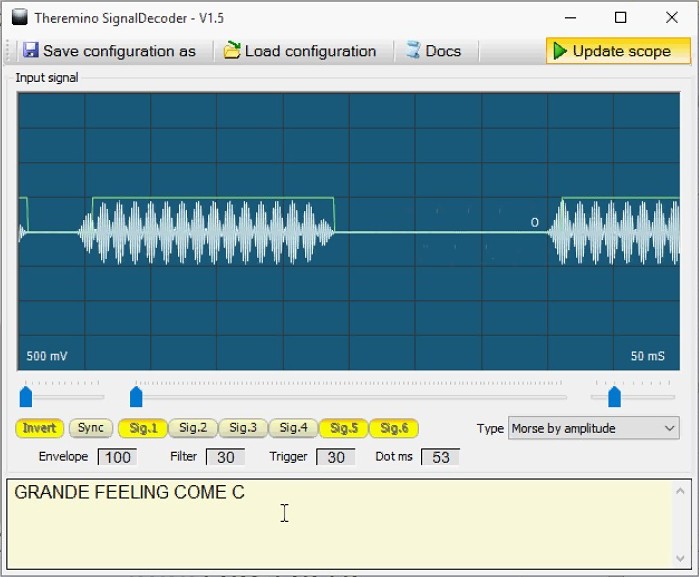 Questa applicazione decodifica i segnali radio ricevuti da Theremino SDR. I segnali morse vengono convertiti in testo, mentre i segnali codificati vengono comparati con una maschera per eliminare le interferenze e infine convertiti in numeri e inviati agli Slot. Si possono quindi controllare altre applicazioni del sistema Theremino, per mezzo di segnali radio codificati.
Questa applicazione decodifica i segnali radio ricevuti da Theremino SDR. I segnali morse vengono convertiti in testo, mentre i segnali codificati vengono comparati con una maschera per eliminare le interferenze e infine convertiti in numeri e inviati agli Slot. Si possono quindi controllare altre applicazioni del sistema Theremino, per mezzo di segnali radio codificati.
Progetti correlati: applicazione Theremino SDR, adattatore UpConverter e Antenna Attiva. Per maggiori informazioni leggere i file di documentazione che si scaricano con la applicazione Theremino SDR.
Questi video di YouTube sono esempi di decodifica del codice Morse:
https://youtu.be/eaK9QHX0VVs
https://youtu.be/xwpt4BjZKYo
https://youtu.be/D6nTDDXkR2U
I segnali morse si ricevono principalmente in onde corte, sulle bande dei radioamatori. Mentre i segnali dei telecomandi e i segnali meteo sono nelle bande dei 433 e 866 MHz, oppure da 200 a 350 MHz, per i modelli di costruzione meno recente.
I tipi di segnali già implementati sono:
- Alfabeto morse
- Segnali dei telecomandi con codifica Ev1527 a 25 bit
- Segnali dei telecomandi con codifica HT12E a 13 bit
- Segnali dei telecomandi con codifica MM53200 a 13 bit
- Segnali dei telecomandi con codifica Motorola 5026 a 18 bit
- Segnali dei telecomandi con codifica UM3750 a 13 bit

La applicazione Signal Decoder è già predisposta per ricevere i segnali codificati dei moduli meteo. Ad esempio gli “Oregon Scientific”, “La Crosse” e “Auriol”, che inviano temperatura e pressione ogni minuto. E anche per i segnali delle sonde meteo esterne per il vento e la pioggia. Ma questi segnali sono poco documentati, quindi ci vorrà ancora del tempo per implementarli.
– – – – – – –
Download di Theremino SignalDecoder – Versione 1.6
Theremino_SignalDecoder_V1.6
Theremino_SignalDecoder_V1.6_WithSources
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)
Theremino SDR
Theremino SDR è un ricevitore multimodale (FM, NFM, AM, SSB e CW), usabile anche come strumento di misura e analizzatore di spettro, per mettere a punto apparecchi di trasmissione e ricezione. Copre tutte le frequenze dalle onde lunghissime (10 KHz) fino alle frequenze ultra alte (1.8 GHz). Per funzionare ha bisogno di poco hardware. Si spende pochissimo (da un minimo di otto Euro a un massimo di qualche decina) e si ha anche la soddisfazione di aver costruito il proprio ricevitore.
Con Theremino SDR e un hardware minimale da 8 euro, si possono ricevere:
- Decine di radio commerciali in FM, in stereo, con qualità paragonabile ai migliori ricevitori FM.
- I segnali dei radiocomandi codificati. Si possono decodificare questi segnali con il SignalDecoder e inviarli agli slot del sistema Theremino per controllare altre applicazioni del sistema.
- I segnali codificati dei trasmettitori meteo per la temperatura il vento e la pioggia (ad esempio gli Oregon Scientific e apparecchi simili).
- I segnali dei satelliti meteo “NOAA”, che si decodificano in bellissime immagini meteo a colori, con l’ottima applicazione freeware WXtoImg.
Aggiungendo la ActiveAntenna e l’UpConverter si ricevono anche:
- Centinaia di radio commerciali in onde lunghe, medie e corte, in tutte le lingue del mondo e fino a distanze incredibili.
- Le comunicazioni tra i radioamatori sulle mitiche bande delle onde corte (160, 80, 40, 20, 17, 15, 12, 11 e 10 metri). In certi momenti si sentono centinaia di QSO e non è raro sentire radioamatori che trasmettono da grande distanza, anche da altri continenti.
- Le comunicazioni sulle bande pirata (170, 88, 45 e 23 metri, nonché i canali pirata degli 11 metri)
- Comunicazioni in alfabeto Morse, decodificabili con il SignalDecoder. Incredibilmente l’alfabeto Morse è ancora molto usato. In certi momenti si sentono decine di trasmissioni in Morse su tutte le bande.
- Comunicazioni RTTY (telescriventi) e codificate con i più strani codici, anche esse decodificabili con le apposite applicazioni.
- I radiofari per la navigazione aerea (Non Directional Beacons)
- I segnali scientifici per la sincronizzazione dei telescopi, i segnali di tempo basati sui campioni atomici. I segnali dei radar e i segnali meteorologici della aeronautica (VOLMET).
Interazioni con il sistema Theremino
Tutte le applicazioni del sistema Theremino possono interagire con Theremino SDR. Il segnale audio può essere decodificato ulteriormente (ad esempio con Theremino SignalDecoder) e si possono ricevere e inviare comandi attraverso gli Slot. Le interazioni comprendono le impostazione di frequenza, volume e modo di funzionamento (FM, AM, SSB, CW etc..), nonché la possibilità di comandare altre apparecchiature con i segnali ricevuti.
Progetti correlati:
Applicazione Theremino_SignalDecoder,
Adattatore Theremino_UpConverter
Antenna Theremino_ActiveAntenna
Alcuni video con esempi di ricezione di comunicazioni tra radioamatori:
Video con comunicazioni SSB sulla banda dei 40 metri
Video con segnali Morse, RTTY e SSB sulla banda dei 40 metri
Esempi lunghi con i quali è possibile verificare la qualità dell’audio. In gran parte sono ricezioni a lunga distanza, da centinaia a migliaia di chilometri. Notare anche che si ascoltano bene tutti i corrispondenti, non solo quelli locali:
ThereminoSDR_SSB_Signals_1
ThereminoSDR_SSB_Signals_2
ThereminoSDR_SSB_Signals_3
ThereminoSDR_SSB_Signals_4
ThereminoSDR_SSB_Signals_5
Video con esempi di decodifica del codice Morse:
https://youtu.be/eaK9QHX0VVs
https://youtu.be/xwpt4BjZKYo
https://youtu.be/D6nTDDXkR2U
Video con la decodifica di una stazione meteo in RTTY:
https://www.youtube.com/watch?v=a328_j_SM2M
Immagini che mostrano il gran numero di stazioni ricevibili:

– Band: VLF – Band: LF1 – Band: LF2 – Band: Long Waves
![]()
– Band: Beacons – Band: MW – Band: 80 meters – Band: 40 meters
– Band: 20 meters – Band: 15 meters – Band: 11 meters – Band: 10 meters
Fare click sulle immagini per ingrandirle.
Immagini ricevute con il “Theremino UpConverter” e con la “Theremino ActiveAntenna” posizionata su un terrazzo, a circa 7 metri di altezza, nel nord Italia, in periodi di buona propagazione. Queste sono le bande più interessanti per i radioamatori e per i segnali scientifici, ma coprono meno del 10% delle frequenze ricevibili. Il restante 90%, qui non visibile, è riservato alla marina, aviazione, polizia e stazioni commerciali, con centinaia di trasmissioni, “broadcast”, che trasmettono notiziari e musica da tutto il mondo.
– – – – – – – – –
Ricevere le onde corte senza UpConverter
La versione 4.6 ha la nuova casella “Sampling mode” nel pannello “Receiver”. Aprendola e selezionando “Sampling mode = Direct sampling Q” si può abilitare lo “RTL2832U versione 3” a ricevere anche le onde corte.
Si potranno quindi ricevere le frequenze da 500 KHz (e anche meno) fino a 30 MHz senza costruire il Theremino_UpConverter. La sensibilità è un po’ inferiore, il rumore un po’ maggiore e la frequenza minima non arriva ai 10 KHz del “Theremino UpConverter”, quindi niente VLF. Ma ugualmente può essere una valida e semplice alternativa per ricevere le onde corte.
Lo “RTL2832U V3″ può anche emettere una tensione di 5 volt per alimentare le antenne attive. Se si vuole abilitare questa tensione lo si deve fare con Theremino SDR chiuso. Quindi prima di lanciare Theremino SDR si fa doppio click sul file “bias_tee_on.bat” che si trova nella cartella “_RTL-SDR_V3_Notes” / “Bias Tee On Off”.
Attenzione a NON collegare direttamente la Theremino ActiveAntenna allo “RTL-SDR_V3” che emette i 5 Volt. In questa pagina c’è un semplice schema per alimentare la Theremino_ActiveAntenna con il 5 volt in arrivo dallo “RTL-SDR_V3”. Sono solo tre componenti e si può anche regolare la sensibilità.
– – – – – – – – –
Nella cartella “_RTL-SDR_V3_Notes” si possono trovare altre informazioni utili nei file:
- “RTL-SDR V3 Notes.txt“, che completa le istruzioni di Theremino SDR
- “ActiveAntenna_BiasTeeAdapter.jpg“,
Altre informazioni sullo “RTL2832U V3”, in questa pagina:
http://www.rtl-sdr.com/buy-rtl-sdr-dvb-t-dongles
– – – – – – – – –
Note per le versioni
Versione 4.3 – Compilata in Debug per errore. – Lenta e poco efficiente.
Versione 4.4 – Questa versione è più efficiente, rispetto alla 4.3. Il carico sul processore è ridotto a un terzo. Se si minimizza la applicazione e si usano tutti gli accorgimenti per ridurre il consumo, si può arrivare intorno al 5%, sui computer dual core. E anche meno, sui quad core. Restano da sistemare alcuni piccoli difetti. Non riparte con la stessa “Banda” con cui la si chiude e alcuni comandi della “FrequencyList” non sono implementati.
Versione 4.5
– Sostituito Theremino HAL con la versione 7.0 (la versione 6.9 dava errori cambiando tipo ai Pin).
– Migliorata la gestione del Mouse. Ora funzionano bene anche i Mouse con la rotella senza scatti.
Versione 4.6-4.7
– Aggiunta la possibilità d selezionare il “Sampling mode” nel pannello “Receiver”. Selezionando “Sampling mode = Direct sampling Q” si può abilitare lo RTL2832U Versione 3 a ricevere anche le onde corte, come spiegato qui sopra.
Abbiamo aggiornato la versione 4.7 con i file di documentazione più recenti.
Chi la avesse scaricata in precedenza può scaricarla di nuovo.
Oppure utilizzare i file di documentazione che si scaricano qui di seguito.
Download dei file di documentazione più recenti
Theremino_SDR_Help_ITA.pdf
Theremino_SDR_Help_ENG.pdf
Zadig_Instructions_ITA.pdf
Zadig_Instructions_ENG.pdf
Download dei file di documentazione più recenti (originali in formato ODT)
Theremino_SDR_Help_ITA.odt
Theremino_SDR_Help_ENG.odt
Zadig_Instructions_ITA.odt
Zadig_Instructions_ENG.odt
ATTENZIONE : Il signor Youssef Touil di SDRSharp (che potete trovare sul sito AirSpy) ci ha scritto che ritiene i sorgenti della nostra applicazione troppo simili ai suoi. Noi non riteniamo che sia così (vedere pagine 25 e 26 delle istruzioni). Ma, dato che siamo semplici appassionati di elettronica e non esperti di copyright, stiamo attendendo il responso dei consulenti legali. Nel frattempo, per fare cosa gradita a Yussef e dimostrargli la nostra buona fede, abbiamo eliminato provvisoriamente la versione Open Source.
Download di Theremino SDR – Versione 4.7
Theremino_SDR_V4.7 (versione senza sorgenti – leggere la nota qui sopra)
Per tutti i sistemi da Windows XP a Windows 10, sia 32 che a 64 bit (Linux e OSX con Wine)

{kind=link}
{kind=link}
{kind=link}