
Schrittmotoren (Stepper)

AUFMERKSAMKEIT: Aktivieren Sie den Pin-Typ Stepper, Stepper_Dir und Pwm_Fast, die Sie verwenden müssen mindestens die Version 5.0 Dell ’ HAL, und die Form Theremino Master aktualisiert werden soll, mit der Mikroprogrammaufstellung 3.2 oder höher.
Um herauszufinden, welche Firmware haben Sie nur Gebrauch l neueste HAL ’, Schließen Sie den Master und zählen Sie die pins. Die originale-Firmware hat nur sechs pins, ab version 3.2 Sie 10 und seit der Version 4 Sie 12.
Die neueste firmware (4.0) Hinzufügen sechs neue Master-Pin (die Übergabe 6 Zu PIN 12 POLIG). Daher, mit jedem Master Modul, Sie können steuern, von drei Motoren plus sechs generischen Pin bis zu fünf Motoren sowie zwei konventioneller pin. Optional können Sie zusätzliche Masters und Slaves hinzufügen..
Schrittmotoren-Steuerungsfunktionen mit Firmware Theremino:
- Ultra-Verwaltung-einfach-Thereminico-Stil.
- Die Software muss nur eine gegeben schicken, Das Ziel in Millimetern (Hinweis 1)
- Nützlichen Arbeiten reichen von -10 in +10 Km (Kilometer) (mit Schritten für mm = 200)
- Verwaltung von bis zu fünf Achsen CNC-Maschinen.
- RepRap Typenverwaltung Maschinen bis zu sechs Motoren (x, y, z, Nach Z Gantry und zwei Extruder). Sie können dann zwei Farben extrudiert..
- Außerdem 65 Maximale Frequenz kHz auf alle fünf Motoren gleichzeitig (Hinweis 2)
- Zittern von weniger als 20 Nano-Sekunden (Hinweis 3)
- Maximale Geschwindigkeit einstellbar (Von 1 in 18000 mm/min) (Hinweis 4)
- Einstellbare maximale Beschleunigung (Von 5 in 1000 mm/s/s) (Hinweis 4)
- Audit-Berichte die Position erreicht, in Millimetern, für jede Achse (Hinweis 5)
- Möglichkeit der Verwendung von unabhängiger oder koordinierter Achsen in 2D und 3D (Hinweis 6)
- Mit Koordinatenachsen in 2D oder 3D, Schreiben von Anwendungen steuern leicht gemacht. Sie müssen nicht um Beschleunigung und Geschwindigkeit berechnen. Sie können einfache Zielbefehle senden., in Millimetern. (Hinweis 7)
- Hülsenfrüchte mit automatischer Breite. L ’ wird vereinfacht und nicht riskieren Schritt Verlust, verursacht durch eine falsche Einstellung dieses Parameters. Sie können Foto-Kupplungen-Objektive verwenden., Wenn Sie die maximale Geschwindigkeit begrenzen (Hinweis 8)
- Automatische Polarität. L ’ Verwendung wird vereinfacht und Sie vermeiden Schritt Verlust, verursacht durch falsche Einstellung dieses Parameters (Hinweis 9)
(Hinweis 3) Als Vergleich: Mach3 hat einen Jitter 500 Mal größer (Von 2 in 15 uns je nach PC). Haben Sie einen sehr niedrigen Jitter, können Sie mit maximaler Geschwindigkeit zu arbeiten, ohne zu riskieren, Schritte zu verlieren. Zeitmessung Mängel als Mach3 gut erklärt in diesem Artikel.
(Hinweis 4) Die Firmware schützt den Motor vor jeder Fehler. Wenn Ihr PC seit einiger Zeit nicht mehr reagiert, die Firmware kommt langsam, ohne Schritte zu verlieren. Gleiches gilt, wenn die Daten mit unregelmäßigen Timing gesendet werden oder Fehler enthalten.
(Hinweis 5) Die Software kann die fehlende Distanz lesen, Jede Millisekunde, für jede Achse und mit hoher Präzision (Bruchteil der ein Tausendstel Millimeter). Sie müssen nicht, diese Informationen zu verwenden., aber einige Anwendungen finden es sehr komfortabel. Kann für diagnostische Zwecke nützlich sein, oder für Algorithmen, die eine angegebene Toleranz erfüllen müssen. Mit diesen Informationen kann die Software mit geschlossenem Regelkreis und immer mit maximaler Geschwindigkeit arbeiten.. Kontinuierlich überprüfen Entfernung von jeder Motor vom Ziel, die Software kann verlangsamt werden genau, wann Sie es brauchen, ohne komplizierte Berechnungen der Geschwindigkeit zu tun, Bahnen und Beschleunigungen.
(Hinweis 6) In der version 5.0 die Koordination des HAL-Achse ist nicht vollständig. Wichtige Anwendungen sorgen für sich selbst, Wir konzentrieren uns deshalb auf die CNC-Theremino-Anwendung, und nur nach dem Ende der Achsen-Koordination.
(Hinweis 7) Die Zwischenziele werden zurückgesetzt, bis zu 500-1000 Mal pro Sekunde. Die beste route, wird kontinuierlich neu berechnet. L ’ Regelalgorithmus berücksichtigt, die tatsächlichen Positionen aus jeder Motor und maximale Beschleunigung, die standhalten. Obwohl die CNC-Anwendung falschen Pfad berechnet, vermeiden Sie in jedem Fall um Schritte zu verlieren.
(Hinweis 8) In der Regel müssen Sie die Breite der Impulse geben (mit Mach3 aus 1 in 15 uns). Dies ist eine weitgehend unverstanden und viele Nutzer regulieren es zufällig. Verwendung Breite Impulsen ermöglicht elektronische Geräte Objektive platzieren, als einige Foto-Kupplungen (zum Beispiel die günstige 4N25, 4N26 und 4N27). Aber baggy Impulse zu beschränken die maximale nutzbare. Theremino Regel diesmal 50 uns (sodass Sie träge Elektronik für langsamere Maschinen verwenden), aber verringert es automatisch, wenn Sie hohe Drehzahlen und hohe Werte von Microstep verwenden. Auf ein Minimum von 7.7 uns, Bei der Verwendung von der Maximalfrequenz (65.535 KHz).
(Hinweis 9) Mit anderen Impuls-Generatoren (wie Mach3) Sie müssen die Polarität des Pulses angeben. Um es zu setzen müssen Sie wissen, wenn der Treiber auf die steigende Flanke oder Abstieg wirkt. Diese Informationen sind nicht immer verfügbar und wenn man es falsch kann passieren sporadisch schrittweise Verlust, sehr schwer zu erkennen. Theoretisch mit der falschen Front sollte keine Probleme geben, Da bei jeder steigenden Flanke, zwangsläufig folgt einen fallenden Flanke. Aber, Wenn die Wegweiser zum falschen Zeitpunkt aktualisiert werden, Schritte gehen möglicherweise verloren., oder zusätzliche Schritte. Die Firmware des Theremino Master steuert die Richtungszeichen mit Sorgfalt. Das Signal kann auch verwendet werden, um Laufwerk Treiber (eine Minderheit) auf fallende Flanke. Beseitigung dieser Anpassung, die Benutzung ist einfacher und beseitigt das Risiko des Verlustes Schritte.
Legen Sie den Pin-Typ Stepper in Anwendung HAL
Jeder Schrittmotor braucht zwei physischen Pin, einen Schritt und eine für die Verwaltung. Der Mikrocontroller würde die Pin zum Vergnügen statt., aber wir beschlossen, um Verwirrung zu begrenzen, durch Angabe der vorgegebenen Positionen, für Pin-Typ Schritt- und Stepper_Dir.
Der Pin-Typ Stepper Lesung aus einem Wert, Das ist einfach das Ziel in mm. Einfache Anwendungen, können weit weg ein Ziel angeben, und lassen sie die firmware. Anspruchsvollsten Anwendungen, Berechnen Sie ihren eigenen Weg und häufigen Zwischenziele senden können. Mit dieser Technik, die Arbeitsgeschwindigkeit kann eine Anwendung überprüfen. (Feed), und genau den Weg bestimmen, sogar in mehreren Dimensionen. Gleichmäßige Bewegung nur erhalten 20 Reiseziele in der Sekunde (bis zu 50 für die anspruchsvollsten Anwendungen).
Umkehren einer Achse:
Die Richtung der Bewegung einer Achse umkehren, tauschen Sie die Werte “1000” und “0”, der Boxen “1000 Mittel-mm” und “0 Mittel-mm”.
Bestimmte Parameter des Typs Pin Stepper:
Max. Geschwindigkeit – Dies ist die schnellste Geschwindigkeit, in Millimeter pro minute. Die Firmware überprüft kontinuierlich die Ziele per software. Wenn die Software fragt, ist zu viel für den Motor, die Firmware schränkt seine Geschwindigkeit, um nicht zu verlieren-Schritte. Diesen Wert zu erhöhen, bis Sie sehen, dass der Motor Schritte verlieren (Es macht einen hohen schrillen Lärm und Haltestellen) und dann verkleinern Sie es durch ein 20..50%, Rückkehr in einen sicheren Bereich. Wiederholen Sie die Tests unter Belastung, oder durch den Motor manuell Bremsen, So stellen Sie sicher, dass Sie einige Zimmer haben.
Max-Acc – Dies ist die maximale Beschleunigung (und Verzögerung), in Millimeter pro minute. Die Firmware überprüft kontinuierlich die Ziele per software. Wenn die Software fragt, ist zu viel für den Motor, die Firmware schränkt seine Beschleunigung, um nicht zu verlieren-Schritte. Erhöhen Sie diesen Wert, bis Sie sehen, dass der Motor Schritte, während Richtungsänderungen verlieren wird (Es macht einen hohen schrillen Lärm und Haltestellen) und dann verkleinern Sie es durch ein 20..50%, Rückkehr in einen sicheren Bereich. Wiederholen Sie die Tests unter Belastung, oder durch den Motor manuell Bremsen, So stellen Sie sicher, dass Sie einige Zimmer haben.
Schritte für mm – Hier musst du den Schritt zu setzen, der Motor ist in einer Drehung, multipliziert die microstep, Legen Sie in der Steuerung, und in Millimeter unterteilt, durch eine Drehung des Motors produziert. Wenn jeder Drehung, Millimeter Bewegung produziert, und der Motor ist ein 200 Schritte pro Umdrehung, und verwenden Sie nicht die microstep, dann legen Sie den Wert: 200 (Schritte pro Umdrehung) x 1 (MicroStep) / 1 (mm pro Umdrehung) = 200. Wenn sechzehn Microstep verwenden, dann legen Sie den Wert: 200 (Schritte pro Umdrehung) x 16 (MicroStep) / 1 (mm pro Umdrehung) = 3200.
Im Zusammenhang mit früheren – Durch Aktivieren dieses Kontrollkästchens, der Motor ist mit den vorherigen verbunden., und ist daher Teil eines Pools, 2D-Tweens ausgeführt, 3D, 4D oder 5D. Ohne diese interpolation, der Motor braucht weniger Straße zu tun., kommen Sie früh und dann den Pfad, würde eine Strichlinie, bestehend aus zwei oder mehr Segmente. Aktivieren der l ’ Interpolation, die Geschwindigkeit aller Motoren wird koordiniert, so dass die tatsächliche Flugbahn, ist eine gerade Linie. Die Nutzung dieser Koordinierung, die Steuerungssoftware können, in einigen Fällen, erheblich zu vereinfachen (in der aktuellen Version von HAL ist Achse Koordination nicht implementiert, Das Ziel in den kommenden releases)
Februar update 2015: Vielleicht ist diese Option nicht so wichtig, wie wir alle dachten ’ starten. Wir werden wahrscheinlich vor anderen weitere dringende Projekte am Ende. Vielleicht schreiben Sie uns, Wenn Sie dringend brauchen.
Der Pin-Typ Stepper_Dir haben Sie keine Parameter anpassen. Ich bin lediglich ein Platzhalter für die physische Ausgabe Pin, zur Gründung der Drehrichtung des Motors. Es ist nicht notwendig, den Wert zu verwenden, dass diese Pins in den Steckplatz schreiben, aber einige Anwendungen können es hilfreich. Der Wert, der in den Steckplatz geschrieben wird, ist die Entfernung zum Ziel, in Millimetern (und bis zu Bruchteilen von einem Tausendstel Millimeter). Diese Informationen kann für Diagnosezwecke verwendet werden, oder für Algorithmen, die eine angegebene Toleranz erfüllen müssen. Mit diesen Informationen kann die Software mit geschlossenem Regelkreis und immer mit maximaler Geschwindigkeit arbeiten.. Kontinuierlich überprüfen Entfernung von jeder Motor vom Ziel, die Software kann verlangsamt werden genau, wann Sie es brauchen, ohne komplizierte Berechnungen der Geschwindigkeit zu tun, Bahnen und Beschleunigungen.
Zeigen Sie die Details der Pin

Polig Details zeigen die Beschleunigung und Höchstgeschwindigkeit in Hz (Schritte pro Sekunde). Diese Werte eignen sich zur Gestaltung l ’ Elektronik, Während der Tests und um festzustellen, wie viele Mikro-Schritt verwenden. In einigen Fällen, Es ist nützlich zu wissen, das grobe Ziel (in Schritten), anstelle der Bestimmungsort in mm.
In HAL-Anwendung, Klicken Sie doppelt auf die Linie des Pins (Schrittmotoren-Typ). Im zweiten Fenster, an der Unterseite, Lesen Sie die Details des ausgewählten Stiftes. Klicken Sie auf das Bild für eine größere Ansicht.
Video zeigt die Genauigkeit der Impulse produziert von der Master Modul, als Mach3


Videos auf YouTube:
http://www.youtube.com/embed/CeC5WD4866o?fs=1&rel=0&loop=1&hd=1&autoplay=1
In diesem Video sehen wir die Krängung im Laufe der Zeit, die Periode zwischen Impuls und nachfolgende. Die beiden Videos ist das gleiche, 100 NS für square. Theremino-Master erzeugt Impulse, mit nur ein Versprecher 20 Nano-Sekunden. Stattdessen überschreitet Mach3 kontinuierlich 2 Mikro-Sekunden und in den schlimmsten Momenten kommen zu 10 Mikrosekunden. Wenn Sie auf Reisen 25 KHz, Krängung des Theremino Master ist nur die 0.05%, Während die Mach3 entspricht 25%. Wenn Sie mehr als die 10% Schrittmotoren beginnen zu leiden und kann Schritte verlieren. In langsameren Maschinen wackliges Mach3 ist harmlos und Verwendung Mikro-Schritte verbessert die situation. In allen Fällen jedoch,, in Anwesenheit von Jitter, Sie müssen die maximale Geschwindigkeit verringern.. Für weitere Informationen, Zeitmessung Mängel als Mach3 (und noch schlimmer Mängel LinuxCNC – EMC2), Lesen In diesem Artikel und vor allem Blick l’Bild am unteren Rand dieser Seite.
Winkelmesser für Schrittmotoren
 Laden Sie das Bild mit der rechten Maustaste.
Laden Sie das Bild mit der rechten Maustaste.
Diese Winkelmesser von 200 Schritte (1.8 Grad pro Schritt), Es ist sinnvoll, die Steuerung des Betriebs, Schrittmotoren. Wir haben lange im Internet gesucht., und am Ende mussten wir uns lassen. Die aktuellen Druckgrößen (75 x 75 mm) sind für Nema-Motoren 23. Mit einem Programm zum Zeichnen, oder mit den Druckereinstellungen, Sie können die Größe anpassen., zu kleineren Motoren, oder größer. Die Winkelmesser kann gedruckt werden, mit einem Inkjet-Drucker, auf Karton.
Das Goniometer Theremino CNC-Hack

Wir haben l verwandelt ’ Bild der Winkelmesser in GCode (mit “Theremino ImgToGcode“). Die GCode gehört zu den “Gravur-Beispiele”, Theremino CNC, und es heißt “Schrittmotors Winkelmesser gc”.
Als Basis empfehlen wir plexiglas, oder farbigem Kunststoff.
Das maximale Verlustrisiko zu bekommen, Kleben Sie ein Blatt aus dünnem Kunststoff, auf einem dicken Blatt, andere Farbe und betreffen nur das oberste Blatt.
Empfehlungen für Schrittmotoren
Als Grundprinzip, dass die Motoren müssen vermieden werden “sgranino” (Sie hören ein “Natasha” und das Motorenwerk). Wenn ein Motor-Schalen Ruft das Werkstück beschädigt.. Es ’ gibt keinen Weg zurück gehen und das Stück zu werfen. Neben Stunden Maschinenzeit zu verlieren, verlieren Sie das Halbfinale.
Schritte gehen um sicherzustellen, dass Sie nicht verpassen also: jede Anpassung zu erhöhen, jeweils einzeln, bis der Motor-Schalen und dann einen zurück 30%, oder sogar 50% auf der sicheren Seite zu sein. Die Regelungen sind: maximale Geschwindigkeit und Beschleunigung (Nell ’ HAL). Für eine optimale Leistung sollten Sie auch den Strom zum Motor anpassen. (ein Trimmer auf dem Modul-Treiber). Der kleine Trimmer sollte erschossen werden, mit einem passenden Schraubenzieher und sehr sorgfältig. Wenn der Schraubenzieher entkommt und einen Kurzschluss macht, Braten Sie der Treiber alle ’ sofort (und manchmal bricht aus).
Wenn der Treiber es erlaubt ist immer gut, mindestens bis die Mikro-Schritte festlegen 4. Wenn Sie nicht den Mikro-Schritt-Motor verwenden erzeugt starke Vibrationen. Mechanische Resonanzen, ausgelöst durch Vibrationen, kann, führen Sie Schritte auch bei sehr niedrigen Geschwindigkeiten zu verlieren. Um dies zu vermeiden sollte den Strom des Motors zu erhöhen., aber dies würde die Höchstgeschwindigkeit zu begrenzen.
Mechanische Reibung zu begrenzen und flexible Kupplungen um zu verhindern, dass die Engine von Bemühungen aufgrund der unvermeidlichen kleinen achsversetzten Fehler hinzufügen. Außerdem sind die Kupplungen die Engine von Resonanzen der mechanischen Teile der Maschine Entkopplung.. Wenn die Mechanik gut gemacht sind und der Motor frei läuft, Strom kann reduziert werden und das ist immer ein plus.
Minimieren Sie den Strom am Motor ist es wichtig. Sie sollten nicht die Max aktuelle festlegen! Der vom Hersteller angegebenen Strom ist nicht die macht, die Sie verwenden. Aber dies ist der Maximalstrom, hinter dem Motor erwärmen soviel zu ruinieren. Verringerung der Betriebsstrom, Minimierung der Vibrationen und erhöht die maximale Geschwindigkeit. Die besten Betriebsstrom, Es ist in der Regel etwa ein Viertel der angezeigten am motor.
In Gegenwart starker Reibung sind wir gezwungen, den Strom erhöhen. Aber diese Zunahme hat eine heilende Wirkung, nur bei niedrigen Drehzahlen. Bei hohen Geschwindigkeiten nicht Verbesserungen zu erhalten.. In der Tat die Gefahr der Entfernung steigt und Sie verlieren sind gezwungen, die Höchstgeschwindigkeitsbegrenzung.
Treiber für Stepper
Stepper darf nicht verfüttert werden direkt, wie Sie mit dem Servo. Sie müssen einen Treiber hinzufügen.. Wir empfehlen, dass Sie die alten Treiber Gestaltung vermeiden, die die integrierte SA1042 enthalten, SA1027, Uln2003, L297 und ähnliche. Beste Treiber enthalten A4988 Chips hergestellt von Allegro.
Ist die maximale Spannung der A4988 35 Volt (So ist es empfehlenswert zu füttern 24 Volt) und ist der Maximalstrom 2 Ampere (aber in diesem Fall dauert es ein Kühlkörper und einen Ventilator, der bläst Luft von oben auf alle Treiber)
 Die Treiber sind nicht an das aktuelle Maximum erträglich durch den Motor angepasst.!!! Der Strom des Motors gezeigt ist die, jenseits dessen die Motoren Schaden würde!
Die Treiber sind nicht an das aktuelle Maximum erträglich durch den Motor angepasst.!!! Der Strom des Motors gezeigt ist die, jenseits dessen die Motoren Schaden würde!
Wenn die Motoren aus 1 Dann ist der Strom Ampere rechts 250 aber und 500 aber. Also Heizen der Motor nicht, die Treiber wenig Wärme und die maximale Geschwindigkeit erhöht.
Verringerung des Stroms sinkt ein wenig’ Das Paar, aber Motoren laufen glatter und ermöglichen eine maximale Geschwindigkeit größer als, vor Beschuss.
Die Trimmer der aktuellen anpassen, Verwenden Sie immer einen Kunststoff-Schraubendreher, Ansonsten können Sie die Treiber Brennen oder die Sicherung Registerkarte "CncShield" starten.
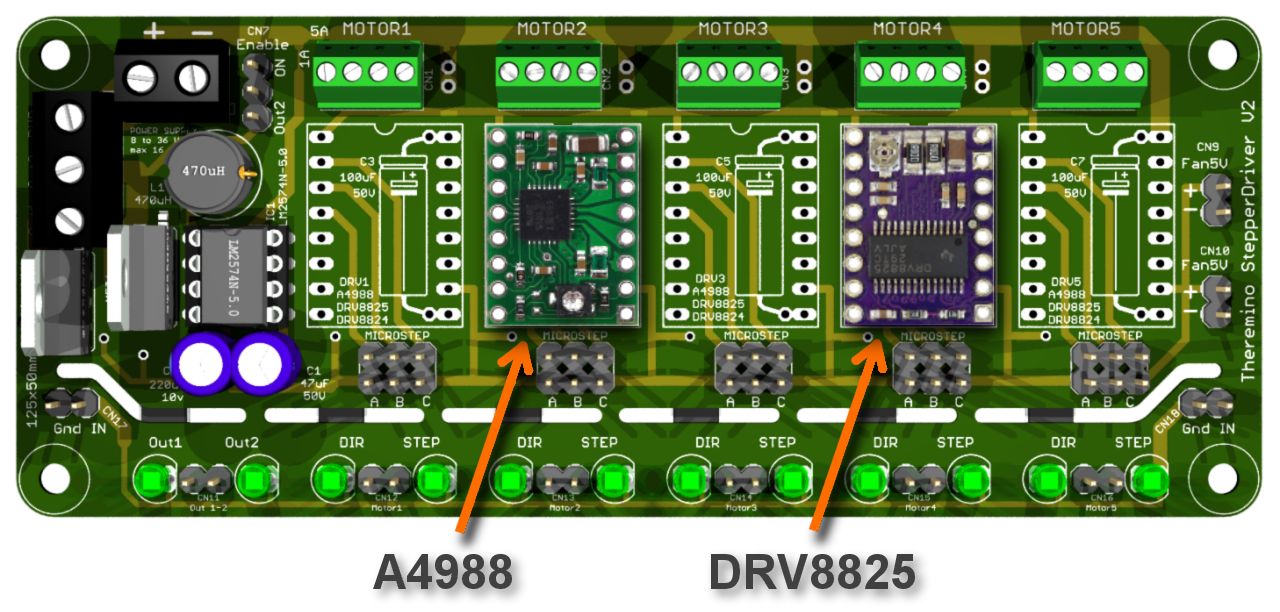
Treiber zur Ansteuerung von Schrittmotor

Die A4988 (Linkes Bild), sind vollkommen kompatibel mit DRV8825 (das Bild auf der rechten Seite), Man muss aber aufpassen, dass sie seitenverkehrt montiert werden müssen (die folgenden Bilder zu sehen).
Es wird empfohlen, Beide 4988 die die 8825, mit Spannung 12 oder 24 Volt und nicht mehr. Mit 24 Volt Höchstgeschwindigkeit ist etwas höher. Die 36 Volt ist am besten nicht zu benutzen weil der 4988 halten Sie sie nicht richtig und die 8825 Arbeit würde zu nah an die Grenze.
Sie sollte nicht größer als aktuelle anhand 1 Ampere. Maximal 2 Ampere, aber mit jeder Kühlkörper auf Fahrer und ein einzelner Ventilator kühlt, dass sie alle von oben.
Obwohl in diesen Bildern die A4988 erscheinen ohne Kühlkörper, fast alle Verkäufer bieten ihnen mit dem Kühlkörper.
Z. B. ein Tür-Treiber verwenden?
Sind auf jeden Fall vermeiden Sie die Cnc-Steuerung mit Treibern auf einer Platte verschweißt. Der erste Fehler müssen Sie werfen l voll ’ Controller. So verbringen Sie viel, Sie verschwenden und verschmutzen, einmal geht gegen unsere Grundsätze um Abfall zu begrenzen.
Treiber können leicht brechen. (nur einen momentanen schlechten Kontakt auf einen Motor) und kann nicht ersetzt werden die Chips auf dem Teller, dann werfen Sie Sie ganze Controllertreiber l & #8217;, verlieren Sie Hunderte von Dollar und stoppen das Auto sehr lange dauert. Es ist auch nicht möglich, neue Treiber auf einem Teller zu Schweißen, Also, wenn wir beginnen, Zum Beispiel, mit drei Fahrern, Sie können ein vierter und ein fünfter hinzufügen.. Dies führt um zu produzieren-Controller mit vier oder fünf Fahrer, auch wenn die vierte und fünfte sind nie verwendet, Rückkehr gegen unsere Grundsätze um Abfall zu begrenzen.
Eine gute Lösung ist zu verwenden Treiber mit den Anschlüssen, so dass ich ersetzen oder einfach können.

Rediculously Ersatzfahrern (über 3 Euro) und ersetzen in dreißig Sekunden. Wenn Sie ein Ersatzteil kaufen und Sie haben dafür gesorgt, dass die Maschine nie aufhören wird.
Nicht täuschen lassen von Verkäufern, die nicht: Schaltpläne herausgeben und “Lassen Sie denken” dass ihre Treiber besser sind. Wenn Sie gehen, um die Chips zu überprüfen sind die gleichen wie diese Treiber, Es ist immer große A4988 (oder gleichwertig) Produkte von Allegro.
Und weißt du auch Aufmerksamkeit auf den Controller direkt auf die Hauptplatine gelötet, Keine Lüfter und Kühlkörper-Less chip. Die Chips werden sehr warm, erhöhen die Wahrscheinlichkeit eines Ausfalls und verlieren l ’ gesamte Controller.
Treiber-Board – Basis für Treiber Unterstützung
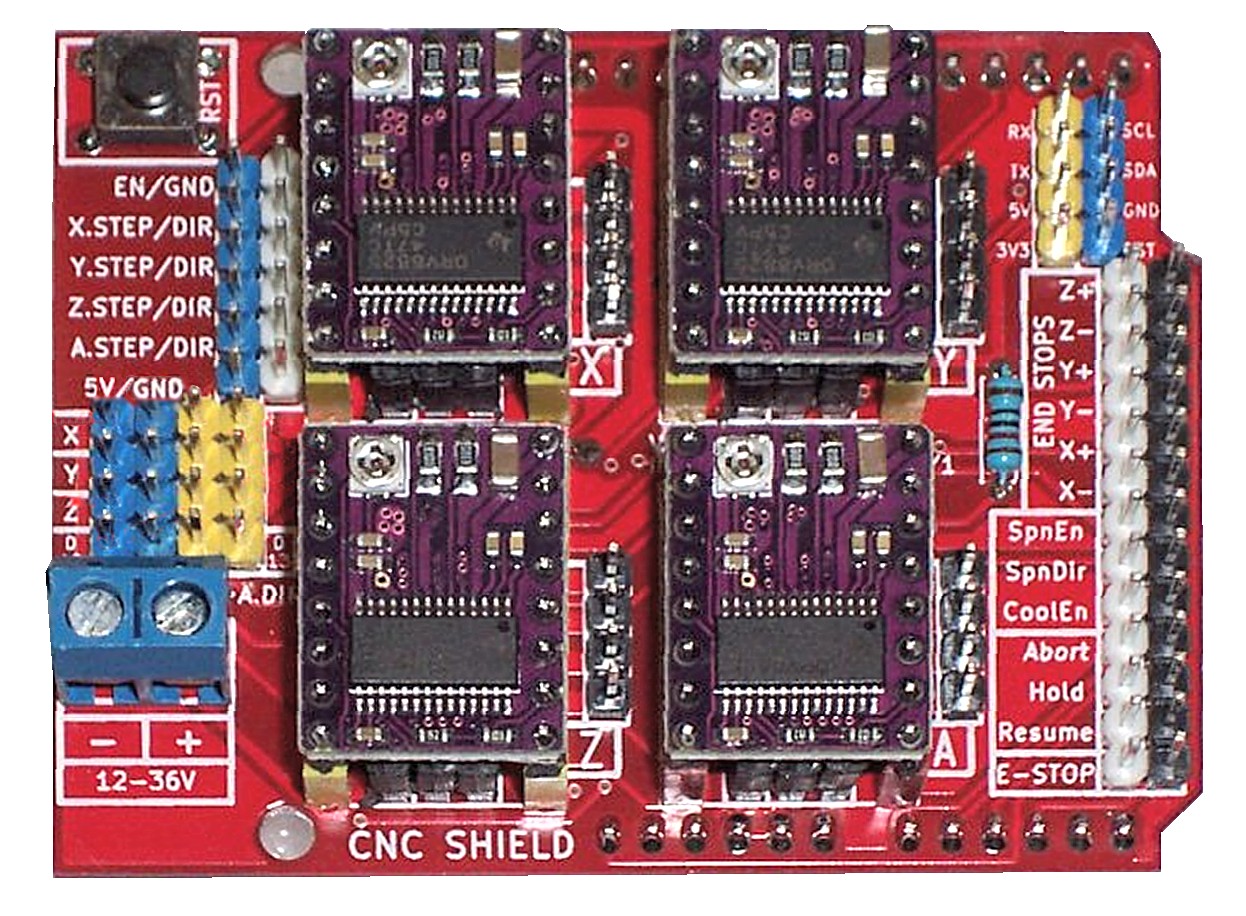
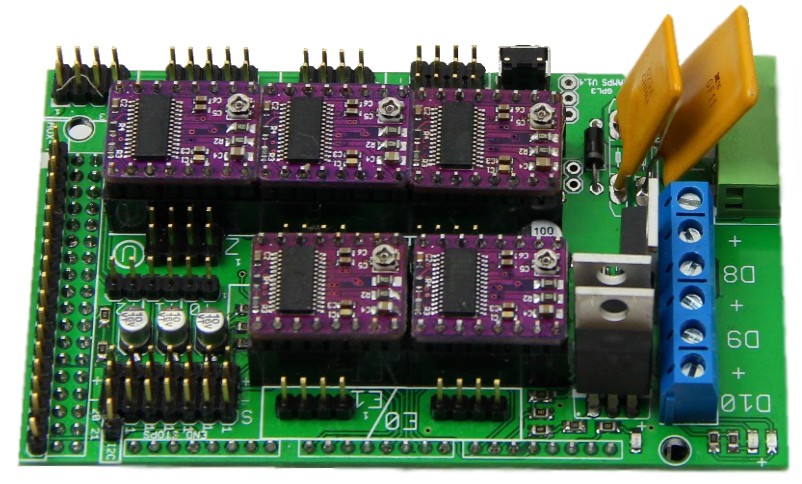
Kaufen Sie teure Cnc-Controller nicht mit dem Chip direkt an Bord gelötet! Die Treiber müssen immer austauschbar sein., wie in der Treiber-Board dieser Bilder.
Im Bild oben sehen Sie die Platte Theremino_StepperDriver (Informationen auf dieser Seite), Während in den beiden Bildern unten können Sie sehen die “Rampen” Und die “CncShieldV3”. Die letzteren Kosten weniger, aber ich bin nicht optogekoppelter, So können sie elektrische Störungen Probleme erzeugen..



Empfehlen Sie, die maximale Modularität, zukünftige Veränderungen zuzulassen, Verbesserungen und Ersatz. Oder mit Steckbrett und Koteletten DuPont führt, oder mit der Adapterplatte Theremino_StepperDriver, oder mit der Rampen, oder mit einem CncShieldV3 (die letzten beiden finden Sie auf eBay).




Platten als die Rampen und die CncShieldV3, sind nicht speziell für die SistemaTheremino gebaut., herstellen die Verbindungen auf die Schaltpläne verweisen. Wenn im Zweifel bitte uns per e-Mail.
Posizionare ich Treiber Sulla CncShieldV3 e Sulla Rampen
Diese Bilder sind nur gültig für die Fahrer DRV8825, Sie sicher, dass die A4988 muss, mit dem Trimmer über eingesteckt werden. Überprüfen Sie für andere Fahrer Website des Herstellers.
Ein Beispiel für Verdrahtung
AUFMERKSAMKEIT: Um die Motoren aktivieren aktivieren muss Signal mit GND verbunden sein. Also immer einen Pullover anziehen “EN / GND”. Wenn Sie dies vergessen, bewegen die Suchmaschinen nicht.


In diesem Bild sehen Sie ein Beispiel für die Verkabelung zwischen Master und CncShieldV3.
In diese Schaltung sind neun master-Pin-Belegung mit vier Fahrern und fünf InOut verknüpft. “Service”. Die InOut kann um die Zündung des Spindelmotors kontrollieren und den unteren Schalter lesen dienen.. Beginnt, noch verfügbaren drei weitere InOut, auf dem Master.
Signal-Drähte kann "Unplugged" und jederzeit verschoben werden, auch mit alles eingeschaltet, aber da c ’ ist ein großes, schlecht Strom versorgt 220 Volt, Du musst sehr vorsichtig sein, dass der Boden Draht, zwischen CncShield und Master, Shorts sind, starke und immer in Verbindung.
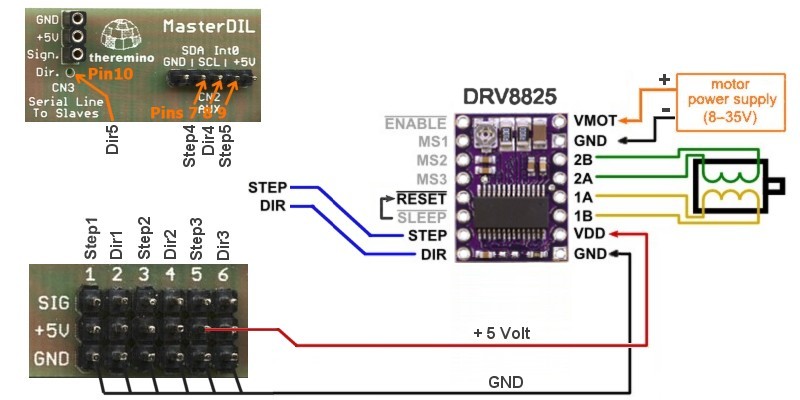
Verbindungen zwischen dem Master und den Treiber Theremino
Hier erklären wir, wie den Meister das mitgelieferte USB-Treiber, ohne Verwendung einer Treiber-Board.
Treiber A4988

Treiber DRV8825
Einstellungen der Mikroschritt
| C (M0) (Ms1) |
B (M1) (MS2) |
In (M2) (MS3) |
Mikroschritt-Einstellungen Drv8825 |
Mikroschritt-Einstellungen A4988 |
| Low | Low | Low | Vollschritt | Vollschritt |
| Hoch | Low | Low | Halbschritt | Halbschritt |
| Low | Hoch | Low | 1/4 Schritt | 1/4 Schritt |
| Hoch | Hoch | Low | 1/8 Schritt | 1/8 Schritt |
| Low | Low | Hoch | 1/16 Schritt | – |
| Hoch | Low | Hoch | 1/32 Schritt | – |
| Low | Hoch | Hoch | 1/32 Schritt | – |
| Hoch | Hoch | Hoch | 1/32 Schritt | 1/16 Schritt |
Geringe Mittel: “Mit GND verbunden” d. h. “Unjumpered”
Alto Mittel: “Verbunden mit positiven” d. h. “Mit Brücke”
CncShield Tabs und Rampen Brücken führen zu positiven Signale, So erhalten Sie mit allen drei Jumper entfernt “Vollschritt”. Verwenden Sie immer 8, 16 oder 32 MicroStep, Fügen Sie dann die ersten beiden Brücken oder die letzte, oder sogar alle drei. Und denken Sie daran, multiplizieren, Nell ’ HAL, der Wert “Schritte für mm” für die Anzahl von Mikro-Schritte-Gruppe.
AUFMERKSAMKEIT: Einige Karten (Rampen 1.4 Einige Hersteller), haben Sie die Jumper-Mikroschritt-Auswahl funktioniert nicht. Einige böse Genie verändert das PWB, um sie fest zu setzen 16 MicroStep (Warum also in 3D Druckern dienen). Schauen Sie mit einem Tester Auswahl Brücke pins, Wenn die Paare von Pins kurzgeschlossen werden, dann ist es eine dieser Karten. In diesem Fall durch das Entfernen der Kunststoff Brücken, mit Geduld und mit dem Dremel, Sie können die PCB korrigieren..
Passen Sie den Trimmer auf der Strombegrenzung
A4988 Modul, Produkt zu Pololu, Der Trimmer ist aus 10 KOhm und ist an der 5 Volt mit einem Widerstand von 20 KOhm. Wobei die Referenzspannung, mit dem Trimmer bei maximaler, ist der 1.6 Volt. Dieser Verweis ist geteilt durch acht intern auf dem Chip und dann im Vergleich mit Widerständen 0.05 Ohm. Dann Sie erhalten einen Strom gleich zweieinhalb Mal die Referenzspannung.
Formular DRV8825, produziert von Pololu, Der Trimmer ist aus 10 KOhm und ist an der 3.3 Volt stabilisiert. Wobei die Referenzspannung, mit dem Trimmer bei maximaler, ist der 3.3 Volt. Dieser Verweis ist geteilt durch fünf im Chip und dann im Vergleich mit Widerständen 0.1 Ohm. Dann Sie erhalten einen Strom gleich zweimal die Referenzspannung.
Die Referenzspannung wird von einem Tester mit den negativen an GND und die Positive auf Mitte der Trimmer gemessen..
Dies sind die aktuellen Vorschriften, die abgerufen werden:
| Position der Trimmer | A4988 | Drv8825 |
| In den meisten | 4.0 Ampere | 6.6 Ampere |
| Drei Viertel | 3.0 Ampere | 4.9 Ampere |
| Zwei Drittel | 2.7 Ampere | 4.4 Ampere |
| Mitte | 2.0 Ampere | 3.3 Ampere |
| In einem dritten | 1.3 Ampere | 2.2 Ampere |
| In einem Viertel | 1.0 Ampere | 1.6 Ampere |
| Null | 0 Ampere | 0 Ampere |
AUFMERKSAMKEIT: Wie Sie sehen können, Wer diese Formulare entworfen hat das volle Ausmaß völlig verfehlt.. Der maximale Strom erträglich (sogar mit dem Maximum von Kühlkörper und Lüfter) ist der 2 Ampere für 4988, und 2.2 Ampere für 8825.
Das volle Ausmaß der Trimmer ist also zwei- bis dreimal größer als was wäre sinnvoll. Mit vollem Umfang so hoch wird die Trimmer Anpassung zwei- oder dreimal härter. Also seien Sie vorsichtig, nie mehr als die Hälfte zu gehen (mit der 4988) und nie mehr als ein Drittel (für die 8825).
Außerdem, nur um die Anpassung noch schwerer zu machen, einige Trimmer verfügen über keinen mechanischen Hintergrund. Sie erhalten auf Null, der Pass ohne zu bemerken, und Sie wechseln von ’ anderen Seite, Angabe des maximalen Strom und sofort springen Sicherungen und Treiber.
SUPER AUFMERKSAMKEIT: Gibt es Treiber mit den Trimmern, die im Gegenteil wirkt. Wobei zuvor ihre Fahrer Vertrauen, Es ist gut, Messen Sie die Spannung-trimmer. Anpassung auf ein minimum, gegen den Uhrzeigersinn, die Spannung sollte möglichst gering sein. (von Null Volt bis zu 100 Millivolt). Durch die Einstellung des maximales, im Uhrzeigersinn, die Spannung sollte maximal (Von 1.5 in 3.3 Volt je nach Treiber). Wenn sie diese Treiber verwenden sehr viel Sorgfalt nicht, Denken Sie immer daran, dass Gesetz Gegenteil (Wer hat diese PCB sollte an die Abteilung weitergeleitet werden “Kanalreinigung”, bevor er mehr Schaden anrichten können).
Passen Sie den Trimmer können Sie auf drei verschiedene Arten vorgehen.
METHODE 1 – LANGSAM: Diese Methode eignet sich für Präzision-Liebhaber, den numerischen Wert des aktuellen wissen wollen. Spannung für den Fahrer gelten (auch die 12 oder 24 Volt, die Sie intern im feed müssen 5 Volt einige Treiber) die Motoren nicht anschließen. Die Spannung zwischen Boden und dem Metallteil des Trimmers. Passen Sie die Spannung einen Strom zu erhalten, der Hälfte Nennstrom ist (zweieinhalb Mal die Spannung =, mit 4988, oder 2 Mal die Spannung, mit der 8825). Dann beginnen Sie, Tests zu machen, nach oben oder unten, immer mit Zähler für jeden Test gemessen. Verwenden Sie einen geeigneten Schraubendreher (besser Kunststoff) und seien Sie sehr vorsichtig. Natürlich für jeden Test sollten Sie die Kraft entfernen, trennen und Wiederherstellen der Motoren. Warum ist diese Methode sehr langsam.
METHODE 2 – FÜR EXPERTEN: Legen Sie die Trimmer, Auge, Laut der aktuellen Tabelle. Dann von einem Viertel und nie gehen mehr als die Hälfte (mit der 4988) und nie mehr als ein Drittel (für die 8825). Bestimmen Ort achten Sie darauf, wo das Minimum ist (viel Licht und ein gutes Objektiv zu verwenden).
METHODE 3 – FÜR EXPERTEN: Markieren Sie die Spitze des Trimmers (gegenüber der Fläche), mit einem kleinen Schild der Sharpie. Beschaffung eines Kunststoff-Schraubendreher, viel Licht und Schutzbrillen. Den Trimmer rund ein Viertel drehen, oder weniger, vor dem Einschalten. Den Motor immer wieder versuchen, um die maximale Geschwindigkeit und Leistung zu bekommen (Wenn Sie erhöhen, steigt die Stromstärke des Drehmoments, aber mit zuviel maximale Strömungsgeschwindigkeit sinkt). Steigt langsam die Geschwindigkeit, bis der Motor Muscheln und Haltestellen, dann versuchen Sie, bewegen Sie es mehrmals und zur Änderung des aktuellen um es besser zu machen. Mit ein wenig’ Erfahrung, die Sie hören können, den Sweet spot, hören auf den Klang der Motoren. Die Anpassungen erfolgen mit Mikro-Schritte fest eingestellt.
Wer gut Englisch kann auch diese niedlichen Aussehen Video von Pololu Das erklärt, wie die Trimmer einstellen.
Überlegungen, die für alle Fahrer gelten
Eine einzige Theremino-Master können bis zu fünf Schrittmotoren steuern.. Die beiden Kabel rot und schwarz, die dazu führen “+ 5 Volt” und “GND” der erste Fahrer, Essen kann auch weiterhin und andere Treiber sein..
Immer verbinden, zumindest den Draht GND, zwischen dem Master und den Treibern. Auch nicht vergessen, die Verbindung “Zurücksetzen” mit “Schlafen”.
AUFMERKSAMKEIT: Immer einen Kondensator zu verbinden 100 UF zwischen “VMOT” und “GND”. Der Elektrolytkondensator muss sein, Nicht-Typ “Niedrige ESR”, mit die positiven süchtig bis zu “+”, Es muß in der Nähe der Modul-Treiber (bis ein paar Zentimeter). Die Betriebsspannung des Kondensators, muss mindestens betragen 5 V mehr, Motorleistung-Versorgungsspannung.
In Ermangelung dieser Kondensator, Sie können besonders gefährliche Spannungen erstellen., können Sie die USB-Kommunikation verlieren verursachen, beschädigen Sie die Treiber und auch Schäden an den Master.
In diesem speziellen Fall, Resonanz-Wirkungen, die durch die hohe Induktivität vorhanden zu vermeiden, Verwenden Sie keine widerstandsarm-Elektrolyt-Kondensatoren in Serie (Niedrige ESR), aber die Gemeinden 100 UF, mit rund 1 seriellen Widerstand Ohm. Lesen Sie die Warnungen von Pololu auf diesen Seiten:
https://www.pololu.com/docs/0J16/all
https://www.pololu.com/product/1182
Vor dem Einschalten alles zuverlässig verbunden sein müssen. Wenn es darum, aus einem Draht-Motor geht, oder Link GND, A4988 Treiber beschädigt wird. Wenn den Trimmer drehen tut eine kurze mit den Schraubenzieher, der Treiber bricht alle ’ sofort. In einigen Fällen seinen Chip explodiert und begibt sich zu rauchen. Theremino Master sollte diese Qualen aushalten., aber es ist am besten nicht auf die Probe zu stellen.
Dies ist nicht zu sagen, dass die Treiber unzuverlässig sind. Wenn Sie keine Fehler machen, nie Pause.
Wir empfehlen jedoch die Treiber immer verbinden, mit männlichen und weiblichen Steckverbinder, für den schnellen und einfachen Austausch. Wir empfehlen, dass Sie fünf oder zehn kaufen, um ein wenig zu erhalten’ Lager, und den Preis senken.
Treiber TB6600
Bei eBay können Sie Treiber komplett mit Foto-Kupplungen und ganz billig kaufen. Sind einzelne Fahrer, Das heißt, haben Sie, eine für jeden Motor zu verwenden.
Es gibt mehrere Modelle auf dem Markt, alle mit ganz ähnlichen Eigenschaften. Auf dieser Seite beschreiben wir nur die TB6600, aber die Beratung und Muster gelten auch für viele andere Modelle, zum Beispiel die TB6560, die Sie kaufen können Shop-ino.
In den nächsten beiden Bildern sehen Sie auf TB6600, in der Version ohne Container und container.
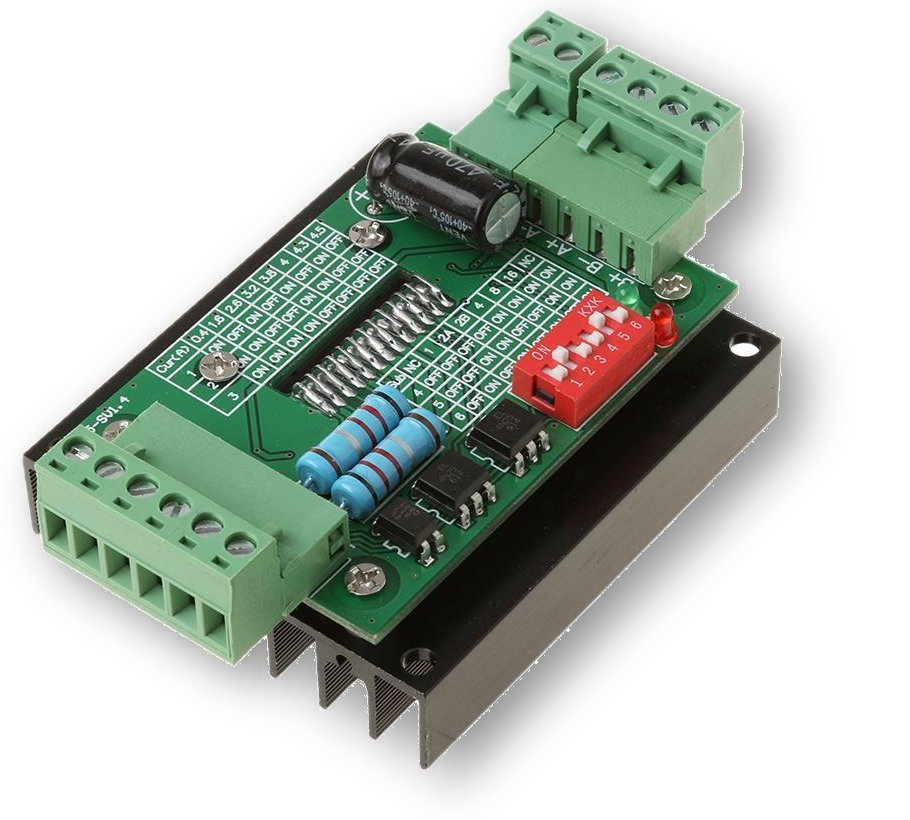

Merkmale der TB6600 Treiber
- Versorgungsspannung von 9 in 42 Volt
- Einstellbarer Strom bis zu 4 Ampere
- Interne Temperatur und Überstrom-Schutz
- Regulierung der Mikro-Schritte aus 1 bis zu 32
- Photocoupled Eingänge mit gemeinsamen positiven
- Positiven Eingänge zum Herstellen einer 5 Volt
- Die Eingänge müssen mit einem Transistor-open-Collector Gefahren werden
Verbindungen zwischen der Master-Modul und Treiber TB6600
Intern TB6600 Treiber (und dergleichen), die Foto-Kupplungen sind positiv über Widerstände verbunden 330 Ohm. Sie müssen dann um sie zuverlässig zu steuern, verwenden Sie eine positive Spannung von 5 Volt. Die Ausgänge des Meisters Modul, das liefern Spannungen zwischen null und 3.3 Volt, kann nicht direkt auf diese Treiber verknüpft werden.
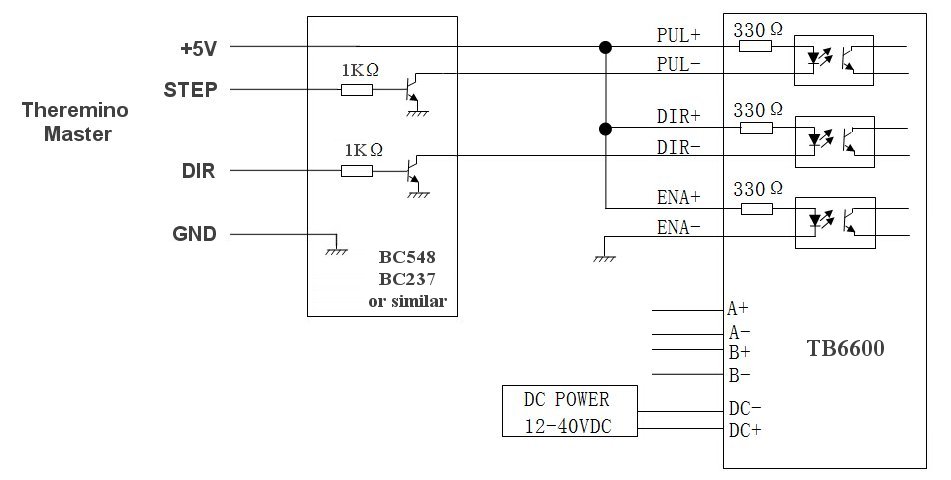
Außerdem, Da die Foto-Kupplungen dauerhaft zum positiven verbunden sind, und sie von ihren negativen Input-Piloten, Daraus folgt, dass man sie mit einem Open-Collector-Transistor fahren muss. Der Transistor macht eine Signal inversion, Warum man Licht Foto-Kupplungen, wenn das Ausgangssignal des Meisters hoch ist.
Einige könnten besser verstehen, das folgende Bild, das realistischer ist (Dank Armando, die geschickt).
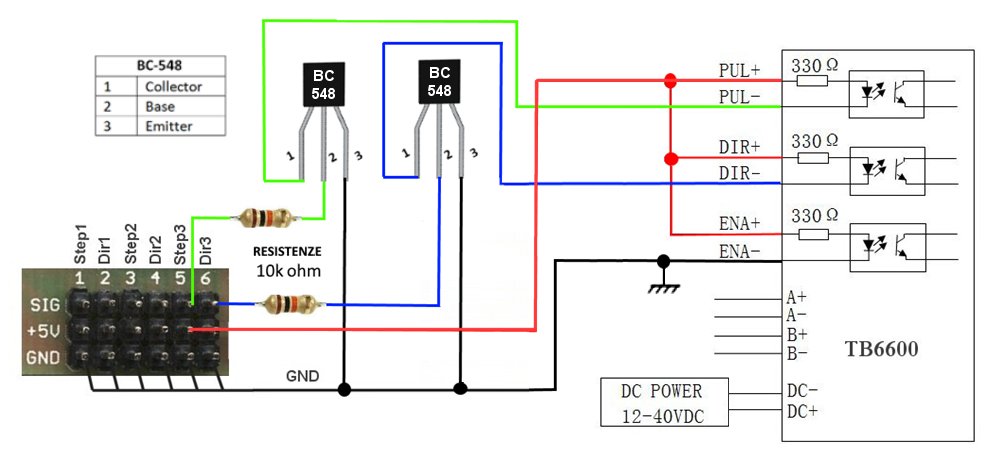
Im ersten Bild haben wir Widerstände 1k, dass ich ein wenig’ Tiefe und verschwendete ein paar Milliampere. Da der Strom angetrieben werden, niedrig ist, können Sie bis zu 10k erhöht werden. In der Praxis verwenden Sie können auch eine beliebigen Zwischenwiderstand, zum Beispiel 2,2 k, 4.7k o 8.2k.
Die beiden Transistoren und die beiden Widerstände, sind Open-Collector-Typ Adapter. Bauen Sie auf die Drähte verbinden sich wie in In diesem Abschnitt, oder auf einer Leiterplatte, indem Sie die folgenden Dieses Projekt.
Offensichtlich funktioniert diese Treiber auch durch den Anschluss der Ausgänge Master K-Eingänge- und PUL-, aber die Immunität gegen elektrische Störungen wäre knapp und das Risiko des Verlustes Schritte wären sehr hoch.
Verbinden Sie mit den Maschinen über den Parallelport

Trennen Sie die parallele der Zündkabel, Sie verbinden damit Theremino CNC-Adapter, und wir arbeiten sofort. Dieser Adapter für Mach3 oder LinuxCNC einsetzbar (mit dem entsprechenden PlugIn), aber noch besser, mit der Anwendung Theremino CNC, Es ist viel einfacher zu bedienen.
https://www.theremino.com/hardware/adapters#cnc
Servo-Steuerelemente
Es gibt alle Arten von Antrieben und macht. Die Servos sind ideal für viele Anwendungen, Schließen Sie an jede Pin Theremino Master (bis zu 6 Zeitgenossen) oder an die Pins auf der Sklaven “Knecht” Das kann bis zu jeweils 10 fliegen.. Sie wählen “Knecht” Wie Pin-Typ und Arbeit sofort. Um sie auszuprobieren, Klicken Sie auf die entsprechende Spalte Wert Anwendung HAL, und bewegen Sie die Maus, halten Sie die linke Taste.

Die MG930 war auch TGY930, Es hat eine Positioniergenauigkeit mindestens fünfmal höher, im Vergleich zu allen anderen Modellen. Wird digital, Es hat einen recht hohen Anlaufstrom und einen hohen schrillen Ton über 400 Hz. Seine Reichweite beträgt ca. 140 Grad.

Die HX5010 ist sehr mächtig, weniger genau als die TGY930 aber sehr billig, Kosten nur 4 Euro und es ist es alle Wert. Ausflug = 200 Grad.

Die HTX500 ist sehr klein, ganz genau und billig, Natürlich hat eine große Macht, aber es reicht für viele kleine Anwendungen, Er hat eine volle 180 Grad und sogar etwas mehr.


Die HXT900 und die TG9e Kosten weniger als 2 Euro, Sie eignen sich für alle Anwendungen mit mittleren und haben eine volle 200 Grad.

Die MG958 ist ein Monster-power 15 Kg/cm und nur Kosten 11 Euro. Achtung, es verbraucht viel Strom und Sie können nicht es mit USB-Anschluss nur füttern. Seinen Weg: 135 Grad.
Ein Diener sehr ähnlich ist der TGY - 1501MG, Er auch aus 15 Kg/cm, ähnlich in Größe und mehr zur Verfügung stehen. Wir haben Sie nicht versucht aber die Funktionen sind OK.
Zusammenfassung der wichtigsten Merkmale der servos.

Diese Servos wurden für den Preis ausgewählt., die Genauigkeit und Stärke unter eine große Anzahl von Modellen, die wir getestet haben, durch den Kauf von: www.hobbyking.com (Es hat gute Preise und Schiffe in kurzer Zeit, obwohl es in den USA befindet)
Ist eine andere Adresse für servos: www.Robot-Italy.com Vom Roboter Italien sind-Modelle in dieser Liste nicht, aber nur sehr teuer und seltsam-Versionen, auch aus drei Revolutionen, acht Revolutionen und kontinuierlicher Bewegung. Immer von Roboter-Italien finden Sensoren Sie, Motoren, Roboter Greifer und vielen anderen interessanten und einzigartigen Accessoires.
Hochleistungs-servos

–
–
–
Dies verspricht viel höheren Leistung DS8231 TGY930, Wir versuchten aber von JR produziert wird und Sie vertrauen können.
http://www.jramericas.com/45190/JRPS8231/
Seine Eigenschaften sind: Auflösung gut 5900 Schritte auf 120 Grad-Drehung sehr niedrigen Totband (der Builder sagt "nicht existent") Zwei Lager Lager für maximale Genauigkeit Pulssteuerung Tarif Loop von 250 MHz für hochpräzise aktuellen Stromverbrauch etwas höher als ein normaler Diener Länge im Abstand 39.1 Breite mm 19.1 mm Höhe 34.5 mm-Gewicht 49 Gramm Drehmoment 1.26 Kg/cm Kosten 70 Euro
Schritt und Toten-Band Messen
Maß der Genauigkeit der Servo ist einfach, setzen Sie einfach auf das Servo eine Grafikkarte und fügen Sie dann eine lange starren Kunststoffrohr 25 Zentimeter auf einen der Arme des Kreuzes. Dann stürzt das Servo mit einer Klammer durch Drehen mit der PIN an der Spitze und die Röhre parallel zu der Tabelle, die auf einer Linie Millimeterpapier endet, Während einige Millimeter oberhalb der Zeile ohne es zu berühren.
Schließlich bewegt sich den Knecht sehr kleiner Mengen mit den nach-oben und nach unten weisenden Pfeil und können gezählt werden online wie viele kleine Bewegungen zu sehen sind dabei für jeden millimeter, Dies sind die “Schritt”
Um die Toten-Band erst Messen fängt ein Weg und dann ist es an mit den nach-oben und nach unten weisenden Pfeil zurück drehen, bis Sie es starten um wieder sehen, wie oft Sie den Pfeil gedrückt, mit einer einfachen Berechnung, Gibt die Breite der Toten-band.
Unbegrenzte Rotation und Drehmoment Servo mit variable

Normalerweise haben die Servos eine Drehung um etwa 180 Grad, aber für manche Anwendungen wäre vorzuziehen unbegrenzte Drehung Motoren. Normalerweise in diesen Fällen mit Schrittmotoren, aber sie haben Nachteile.
Stepper erfordern eine komplexe Treiberschaltung, erfordern Sie und-Auslauf Rampen und haben Sie sehr wenig Drehmoment. Mit Stepper, wenn Sie zu schnell zu beschleunigen, oder übersteigt kritische Drehmoment und Drehzahl, Distanz zu verlieren und dann verlieren Sie l ’ Ausrichtung zwischen Software und Hardware.
Die Grenzen der Schrittmotor zu überwinden, die teuersten Autos verwenden Motoren an der Fortbildung, mit Feedback-Schleifen und externen der Motorposition-Sensorik. Mit einem Diener geändert bekommen wir genau das, aber ohne die Brücke fahren Schaltung, in der Regel erforderlich für Motoren wird fortgesetzt. Bridge Treiber existiert bereits auf dem kleinen Servo-chip die Feedback-Mechanismen werden sie hinzufügen., mit Sensoren (optischen oder magnetischen) und software. In den schwierigsten Fällen, Dank der Macht der PC-software, Sie könnten auch einen PID-Algorithmus hinzufügen..
Mit eine einfache Änderung kann das Servo um sie in Multiturn arbeiten zu ändern.. In der unveränderten Diener, Das Steuersignal steuert die Position der Kurbelwelle ’. Nach dem ändern, Das Signal steuert die Drehzahl und Drehmoment, in der zwei rotation.
Hier ist, wie Sie von der Diener Mehrgang, verbunden mit einem PIN als Servo_16 konfiguriert.
| Signal | Kraft und Geschwindigkeit |
| 1000 | Maximalkraft und Höchstgeschwindigkeit im Uhrzeigersinn |
| 750 | Halbe Kraft und Geschwindigkeit im Uhrzeigersinn |
| 600 | Minimale Kraft und Geschwindigkeit im Uhrzeigersinn |
| 500 | Der Diener steht still |
| 400 | Minimale Kraft und Geschwindigkeit gegen den Uhrzeigersinn |
| 250 | Halbe Kraft und Geschwindigkeit gegen den Uhrzeigersinn |
| 0 | Maximalkraft und maximaler Geschwindigkeit gegen den Uhrzeigersinn |
Alle Servos sind bei Multi-Runde Vorgang bearbeitet werden, aber wir haben die Muster nur für HXT900 vorbereitet. Diese Servo haben viele Vorteile, wenig Strom verbrauchen, powered by USB und Kosten nur zwei Euro von HobbyKing werden können: HobbyKing.com _ HXT900 (Wann erhalten Sie die Reihenfolge von HobbyKing einige Stapel von 10 Erweiterung führt: Von 30 cm und Von 60 cm)
Mit dem Servo HXT900 ist die Drehzahl einstellbar, aus ein paar Umdrehungen pro Minute auf etwa 80 U/MIN, und das Drehmoment ist einstellbar von mindestens (stoppt, sobald Sie ein wenig Mühe machen) bis zu 1.6 Kg/cm (Man kann nicht aufhören, den PIN-Code, Befestigen Sie es mit den Fingern).
Die folgende Tabelle zeigt die Stärke und Geschwindigkeit, die ein HXT900 gewonnen werden können, Umwandlung der Rotation in eine lineare Bewegung mit Gewindestangen oder Riemenscheiben.
| Methode |
Mm pro Umdrehung |
Geschwindigkeit maximale (mm/min) |
Stärke maximale (Kg) |
| Gewinde-bar 1 mm/u | 1 | 80 | 60 |
| Gewinde-bar 2 mm/u | 2 | 160 | 30 |
| Gewinde-bar 4 mm/u | 4 | 240 | 15 |
| Durchmesser der Riemenscheibe 3.2 mm | 10 | 800 | 6 |
| Durchmesser der Riemenscheibe 5 mm | 15 | 1200 | 4 |
| Durchmesser der Riemenscheibe 10 mm | 30 | 2400 | 2 |
| Durchmesser der Riemenscheibe 20 mm | 60 | 4800 | 1 |
Die Eigenschaften der HXT900 anzugeben 1.6 Kg/cm. Dann ein HXT900, Riemenscheibe 20 mm Durchmesser, könnte erhöhen 1.6 Kg. In dieser Tabelle, auf der sicheren Seite zu sein, Wir berechnen 1 Kg.
Ein Servo HXT900 ändern


Entfernen Sie die selbstklebenden Etiketten auf beiden Seiten, die vier Schrauben, Öffnen Sie das Servo und schneiden Sie die drei roten Drähte, nah an der Platine.


Ziehen Sie die Schraube Motor, Das Potentiometer Parade von ihrem Hauptquartier. Schnitt mit den Clippers Metall Tabs, wo gelötet werden die Drähte.


Entfernen Sie die zwei Zahnräder von der Welle und beseitige die Clippers Alle Innenteile, verhindern, dass Drehung. Überprüfen Sie, ob die Welle frei dreht.


Schnitt mit den Clippers zwei Zähne, die sich auf ’ größere Kettenblatt.
Das Potentiometer im Ort Kreisverkehr Thread. Rutschen Sie die Räder auf die pins, Ausgehend von der kleinsten. Alle Gänge gehen mit großen Boden, in Richtung der Motor. L ’ das große Kettenblatt, Das bringt den Motor-Bolzen, sollte nicht allzu gedrückt werden, sondern nur auf die anderen Zahnräder näher, ohne sie zu berühren.


L ’ linken Bild ist ein Schaltplan und funktionale, der auf der rechten Seite zeigt an, Änderungen zu tun und wohin mit den Widerständen.
Fügen Sie zwei oder drei kleine SMD-Widerstände (0603), wie angegeben (Klicken Sie auf die Bilder um sie zu vergrößern)
Es gibt auch eine HXT 900 mit anderen hier gezeigten Stromkreis. In dieser Datei sind die Regelungen und alle Informationen, die wir finden konnten. Leider ist das Datenblatt auf Chinesisch: uploads/files/HXT900_Type2.zip
Schließlich schließen Sie den Motor und ausprobieren.
Servo als HXT900 bearbeiten
Es ist unmöglich, die Anweisungen für alle Arten von bestehenden servo. In dieser Datei gibt es alle Informationen, die Schemata und Datenblatt, Wir haben bisher gesammelt: uploads/files/ServoInfoAndDatasheets.zip
Multi-Runde kommerzielle Knecht
Schließlich haben die Hersteller diese Möglichkeit entdeckt. Der Katalog Pololu existieren bereits vier Modelle, mit Preisen von 5 Euro bis zu 15 Euro. Der unten stehenden Link zeigt die kleinste, aber von diesem Link, und entdecken Sie den gesamten Katalog Pololu, nicht nur für Motoren:
http://www.pololu.com/product/2820
Grundsätze der Arbeit des normalen Servo und multiturn
Jedes Modell der Knecht unterscheidet sich mechanisch und elektrisch, aber die Prinzipien sind dieselben für alle servo: uploads/files/ServoCircuitsAndTimings.zip
Betrieb von standard-servo.
- Das Signal vom 0.5 in 2.5 MS, der Servo-Chip umgebaut., einen Wert, der von reicht 0 bei drei Volt.
- Das kleine Potentiometer innerhalb der servo (Je nachdem, wie es eingeschaltet ist), Darüber hinaus werden ihm einen Wert von 0 in 3 Volt .
- Wenn die zwei Spannungen gleich sind, die Chip-Spannung zum Motor nicht.
- Als die zwei Spannungen von einander abweichen, der Chip durch immer mehr Macht an den motor.
- So ist die Spannung an den Motor gegeben., oder in die entgegengesetzte Richtung, Je nachdem, ob höhere Spannung oder andere.
Multi-runden Betrieb das servo.
- Das Potentiometer wird durch zwei Festwiderstände ersetzt., Das Potentiometer immer in der Mitte des Rennens simulieren.
- Alles andere ist genau wie bei der normalen servo.
- Wenn das Steuersignal halb (1.5 MS), dann die beiden Spannungen sind gleichwertig und der Chip nicht Stromversorgung zum motor.
- Als die zwei Spannungen von einander abweichen, der Chip durch immer mehr Macht an den motor, eine oder andere Weise.
Wie viel Strom an Motor gesendet?
- Der Chip im Inneren der Diener fungiert als "Reaktion Komponente".
- Die Reaktion tritt im closed-Loop-Servo für "normal" oder "Feedback".
- In mehreren Runden Knecht ist es eine einfache Reaktion oder "Lug".
- In beiden Fällen gibt es eine Reaktion-Kurve.
- Response-Kurve, Je nachdem das Steuersignal (Abweichung zwischen den beiden Spannungen), bestimmt die Spannung an den motor.
- Response-Kurve ist eine Art von "S" mit einer flachen Stelle in der Mitte.
- Die Neigung der Kurve (Eingreiftruppe) wird durch einen Widerstand geregelt.
- Die flachen Fleck in Mitte (Tote zone) über einen zweiten Widerstand eingestellt ist, feststellt, dass seine Breite.
- Theoretisch wäre es besser, viel Reaktion und kurze Tote Zone haben, aber Sie können nicht übertreiben.
- Wenn Sie die Reaktion-Parameter übertreiben, der Motor kann ist fester und sogar heftig schwingen.

Bürstenlose Servomotoren


Es gibt Motoren mit oder ohne Bürsten, aller Art, Ausgehend von wenigen Gramm bis zu über 10 KW Leistung
Im Katalog: finden Sie Motoren mit großen Preisen und Controller zu ihnen mit Strömen bis zu pilot www.hobbyking.com 300 Verstärker mit standard-Signale des Systems Theremino.
Mit jedem “Sklave” vom Typ “Knecht” Sie können bis zu zehn unabhängige Motoren steuern..
Die Bilder zeigen eine 6 Kilowatt (125 Ampere in 48 Volt) und eine kleine Controller für bürstenlose Motoren.
Einige der interessantesten Beispiele der ausgewählten Module
Der Katalog hat HobbyKing geändert.. Wir hatten ausgewählte Motoren Links geändert haben und dies für uns ist ein Problem, weil wenn wir Arbeitssuchende gebrochen-Links veröffentlichen wir bestrafen.
Außerdem hat der Katalog HobbyKing schwerer zu sehen geworden., Warum kann ich nicht für Power Motoren bestellen. Also das beste, die wir tun können ist auf der ersten Seite der Motoren Motors hinweisen, nach Größe sortiert:
https://hobbyking.com/en_us/electric-motors-1/size.html
Beispiele für Steuerungen für Motoren
Controller von 6 Amp. für bürstenlose Motoren (BÜRSTENLOSE) – über 6 Eurohttp://www.hobbyking.com/hobbyking/store/__4318__TURNIGY_Plush_6A_8bec_6g_Speed_Controller.html
Controller von 25 Amp. für bürstenlose Motoren (BÜRSTENLOSE) – über 8 Euro
http://www.hobbyking.com/hobbyking/store/__11616__Turnigy_AE_25A_Brushless_ESC.html
Controller von 20 AMPS für Motoren mit Bürsten (GEBÜRSTET) – über 3 Euro
http://www.hobbyking.com/hobbyking/store/__9090__Turnigy_20A_BRUSHED_ESC.html
Controller von 30 AMPS für Motoren mit Bürsten (GEBÜRSTET) – über 6 Euro
http://www.hobbyking.com/hobbyking/store/__6468__Turnigy_30A_BRUSHED_ESC.html
Motoren im Katalog Pololu
Es wird empfohlen, mit diesem Link starten, und entdecken Sie den gesamten Katalog Pololu, nicht nur für Motoren. Von Pololu alles für DIY.
http://www.Pololu.com/category/22/Motors-and-Gearboxes
Motoren im Katalog Solarbotics
Auch sind hier Motoren (und andere nützlichen Komponenten für Entscheidungsträger). Mehr Kosten, aber es ist immer wieder einen Blick Wert, auch in diesem Katalog:
https://solarbotics.com/product/gm2/
https://solarbotics.com/catalog/motors-servos/gear-motors/
AUFMERKSAMKEIT: Links zu kommerziellen Unternehmen könnte eine versteckte Werbung darauf hindeuten., dafür sollten Sie es angeben: Niemand zahlt sich aus und wir tauschten nie eine einzige E-Mail mit einem der hier aufgeführten Unternehmen. So sind wir frei, über gut und Böse als jeder andere sprechen und unsere “Shopping-Tipps”, Sie sind nur nützliche Informationen, während unsere Forschung der Komponenten.
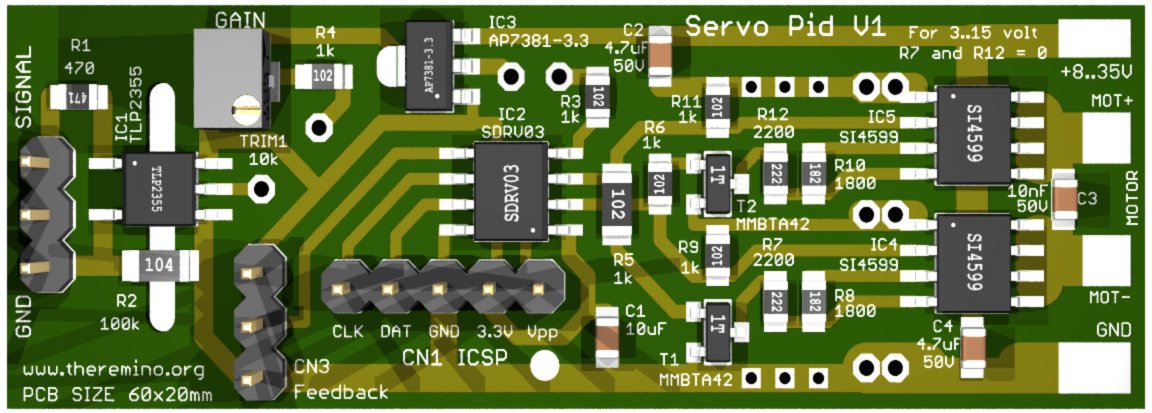
ServoPID
Dieses Modul ist eine H-Brücke, die Gleichstrommotoren bis fünfzig Watt steuern kann, (bis vor ein paar Ampere und mehr als dreißig Volt) und sie in die Servomotoren.
Wir danken den Hersteller und Verkäufer von eBay MaxTheremino, welche leicht Leiterplatten und Kits für dieses Projekt vorbereitet. Folgen von MaxTheremino Link auf eBay und wenn er sie hatte noch schreiben ihn katalogisieren sie geschickt haben.
Diejenigen, die es vorziehen, nur die Komponenten zu kaufen und die PCB Techniken drucken DIY, Es wird in komprimierte Datei alle Dateien befinden benötigt um dieses Modul zu bauen.
Leiterplatten in Eagle-Format, Bilder und Videos, Simulationen LTSpice und Systeme:
ServoPID_V1.zip
Das Steuersignal kann ein klassisches Signal sein “Knecht” oder “PWM”, , Das kann von einem Modul Master, von einem IotModule, aus einer netmodul zu, oder sogar von einer Fernbedienung für Modellflugzeuge.
Die H-Brücke wird von einem Mikrocontroller PIC gesteuert, Programmierbare mit der Firmware, dass wir für verschiedene Bedürfnisse vorbereitet haben. Im einfachsten Fall sind Sie mit einem Motor vorwärts oder rückwärts, Einstellen der Geschwindigkeit. In komplizierteren Fällen über ein Potentiometer die Position und stellt die Position mit einem PID-Algorithmus zu messen.
Mit dem Potentiometer und der PID hat es den gleichen Betrieb des Klassikers “Knecht” aber, Im Gegensatz zu kommerziellen Servant, Sie haben die Möglichkeit, die einzelnen Parameter zu variieren, Morta Bereich, Messauflösung des ADC und die PID-Koeffizienten.
Im Gegensatz zu normalen Servoeingangssignal mit einem Optokoppler isoliert. Dies ermöglicht, getrennt zu halten völlig die Masse der Motorenergieversorgungsschaltung von dem dem Steuer-PC. Dies wird radikal elektrische Störungen beseitigen, die zu Fehlfunktionen führen könnten.
WIRING
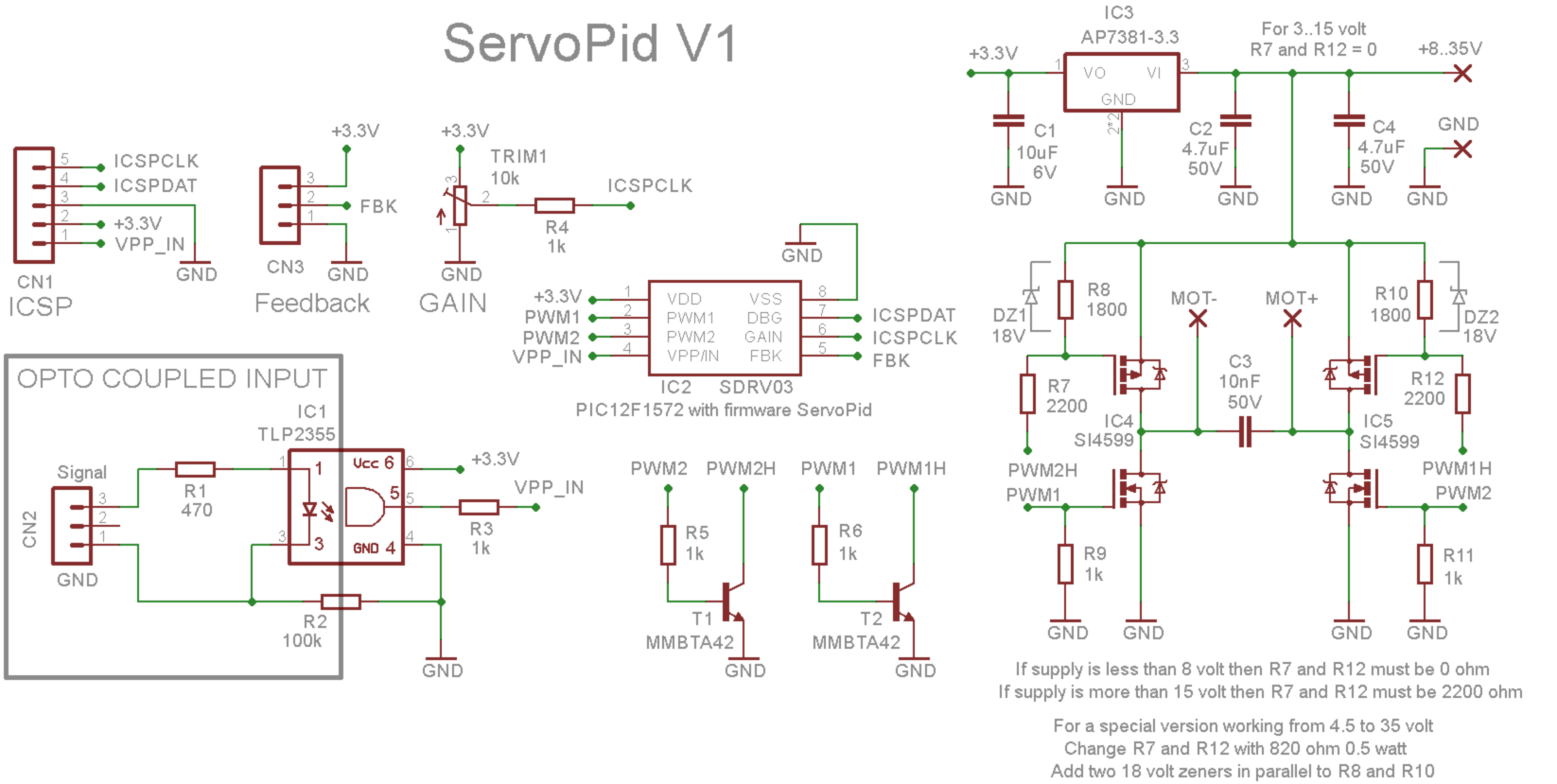
Das Steuersignal, Servo-Typ oder Pwm, Es wird CN2 mit dem Verbinder verbunden, durch R1, die den Strom auf wenige Milliampère und Pilot die LED des Fotokopplers begrenzt,.
Die Amplitude des Steuersignals sein muss aus 3 in 6 Volt, die positive Impulszeit muss zwischen 500 in 2500 uns (über), und die Wiederholungsrate von 50 Hz bis 500 Hz.
Das Steuersignal setzt sich durch den Fotokoppler IC1, durch R3 und gelangt an Pin 4 des Mikro, welche Maßnahmen der Zeit mit hohen Auflösung (Zweiunddreißigstel von Mikrosekunde).
Der connector “ICSP” Es wird verwendet, um den PIC mit der Steuerungs-Firmware zu programmieren und auch einen USB-Seriell-Konverter für das Debugging zu verbinden. Im nächsten Abschnitt “FIRMWARE”.
Wenn Sie konfigurieren, dass die Firmware die PID mit, dann der Stecker “Rückmeldungen” Es muss in eine Position Mess Potentiometer angeschlossen werden. Gewöhnlich Dieses Potentiometer ist starr mit der Abtriebswelle, die durch die Antriebswelle mittels eines Untersetzungsgetriebes oder Riemen bewegt. Das Rückführpotentiometer kann auch Multiturn sein und muss ein lineares Potentiometer sein, mit Werten, normalerweise zwischen 1 k-Ohm und 10 k ohm. Die zentral des Potentiometers muss mit dem zentralen Anschluss angeschlossen werden, der Draht in dem Diagramm hat den Namen FBK.
Im Falle, dass das Feedback Platz im Gegenteil nimmt, können Sie die beiden seitlichen Anschlüsse des Potentiometers zwischen ihnen tauschen. Aber seien Sie vorsichtig, dass das Zentrum muss immer an FBK angeschlossen werden. Wenn Sie das Potentiometer könnte scheitern erhitzt und beschädigt werden.
es Trimmer “DAZUGEWINNEN”, Sie dient dazu, manuell die Verstärkung des PID einstellen, es nutzt nur mit einigen Firmware-Konfigurationen und vor allem während der Tests eines neuen Motors, die PID-Werte zu Feinabstimmung. Der Widerstand R4 entkoppelt die Trimmer aus ICSPCLK Signal, so können Sie das ICSPCLK Signal für das Debuggen mit seriellem verwenden.
Der Spannungsregler “IC3” erzeugt eine Spannung von 3.3 Volt sehr stabil. Diese Spannung versorgt den Mikrocontroller, Potentiometer-Feedback, Qtr1 der Trimmer und der Optokoppler IC1.
Die beiden Ausgangssignale des PIC, mit Namen und PWM1 PWM2, Fly-Brücke durch die vier MOSFET gebildet, die in dem Chip SI4599. Die Brücke ist mit einem PWM-Signal hoher Frequenz geschlossen (normalerweise 16 oder 32 KHz), die reguliert die Motordrehzahl und stellt sie in eine oder andere Richtung drehen,. Während der Umschaltungen sorgt die PIC, dass die beiden Zweige der Brücke nie gleichzeitig geschlossen sind (die würden Kurzschluss die Stromversorgung).
Die Versorgungsspannung muss an den Motor angepasst werden,, wenn es zu viel der Motor kann brennen. Wenn Sie auf das Schema keine Änderungen vornehmen können, um Versorgungsspannungen verwendet werden, von 8 in 35 Volt. Das Diagramm zeigt die Modifikationen durchgeführt werden, um andere zwei Stromversorgungsbereiche zu erlauben,. Der erste Bereich (Von 3 in 15 Volt) Es erfordert nur kurze R7 und R12. Der zweite Bereich (Von 4.5 in 35 Volt) Es erfordert ersetzt R7 und R12 sowie zwei Zener-Dioden hinzufügen 18 Volt.
FIRMWARE
Am ICSP Verbinder einen Programmierer PicKit2 Verbindungs (finden Sie unter Diese Seite). Beachten Sie, dass die Datei PK2DeviceFile.dat, zu dem auch die PIC12F1572 in diesem Projekt, Es ist nur gültig für PicKit2. So höchstwahrscheinlich mit PICKIT3 nicht in der Lage sein, diese PIC zu programmieren (oder zumindest wir nicht wissen, wie Sie zu zeigen,).
In der ZIP downloaden Sie am Ende dieses Abschnitts finden Sie die Datei ServoPid35.hex bereits fertig und bereit, mit PicKit2 im PIC geschrieben werden.
Diese Datei ist die einfachste Versionskontrolle. Durch Variieren des Steuersignal vom Minimum zum Maximum bewegt sich der Motor mit variabler Drehzahl in den beiden Richtungen. Mit dem Steuersignal in einer zentralen Position, wobei der Motor stoppt.
SENDE DEBUG Daten von der seriellen FIRMWARE
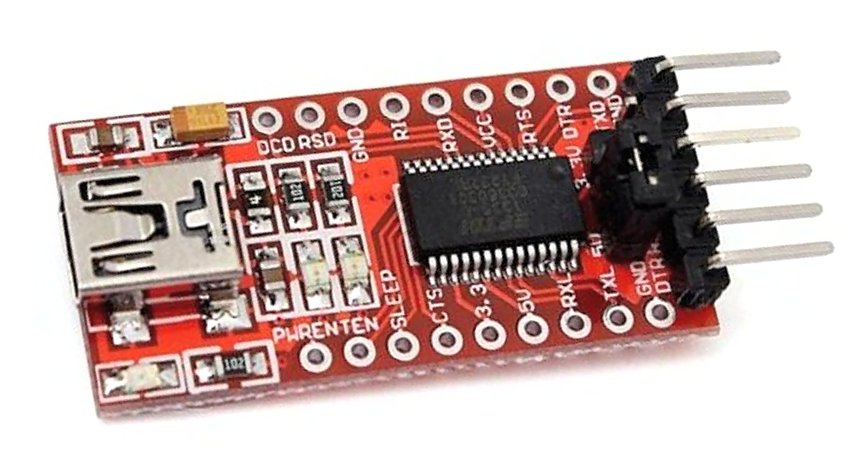
Der Draht ICSPCLK wird der ICSP Anschluss auch senden Debug-Daten von der Firmware an die serielle Schnittstelle verwendet. Um es zu benutzen Sie müssen eine Verbindung GND und ICSPCLK auf GND und RX-Pin eines Seriell-USB-Konverter wie was in diesem Bild zu sehen ist.
Dann Sie die Firmware ändern Werte an die serielle Debug senden, Empfangen von Daten mit den Anwendungs Terminal und Anzeigen von ihnen wahlweise mit der SignalScope oder andere Anwendungen unseres Systems.
EDIT und neu kompilieren DIE FIRMWARE
Um die Betriebsparameter zu ändern und die komplexeste Versionskontrolle implementieren (Positionsregelung mit Rückführung und PID) Sie müssen die Datei bearbeiten ServoPid35.bas und neu zu kompilieren. Die Zusammenstellung wird eine Datei erstellt VERHEXEN die es in der PIC mit PicKit2 geschrieben werden.
So bearbeiten Sie die Datei, die wir empfehlen, die hervorragende FineLineIDE und zu kompilieren, die ProtonCompiler.
Beide sind sie frei und Sie können sie von den folgenden Links herunterladen:
www.protonbasic.co.uk/content.php/2077-FineLineIDE
www.protonbasic.co.uk/vbdownloads
Die Anweisungen und hilfreiche Kommentare, die Firmware ändern in der Datei gefunden werden ServoPid35.bas und am Ende der Datei finden Sie ein Glossar der verwendeten Begriffe und Anweisungen Schritt für Schritt finden die PID-Parameter einstellen.
Wohlgemerkt ist dies eine komplexe Firmware und es wird nicht leicht sein, zu erlernen und zu verwenden in angemessener Weise alle Optionen. Der schwierigste Teil ist auf jeden Fall einstellen, die PID-Parameter, um zu vermeiden, Schwingung und zugleich eine schnelle Antwort und kleinere Chipfläche bekommen kann.
Wir haben unser Bestes, um die Einstellung der PID-Parameter zu erleichtern, unter Verwendung des Ziegler-Nichols-Verfahren zu vereinfachen und sie weiter. Wir korrigiert auch einige Fehler des Verfahrens Ziegler-Nichols veröffentlicht auf Wikipedia, aber die Einstellung der Parameter für ein neues System (Motor, Reduzierungen und Feedback), Es bleibt ein Betrieb von Spezialisten.
Hinweise zur Firmware
Um die Verlustleistung der MOSFETs zu verringern, empfiehlt es sich, in der Firmware eine niedrigere Frequenz für die PWM einzustellen. Normalerweise ist die Frequenz auf eingestellt 20 KHz, aber in einigen Anwendungen haben wir es auf . abgesenkt 2 KHz reduziert das Erwärmungsproblem der MOSFETs auf praktisch Null.
Die einzige Kontraindikation ist das Geräusch, das etwas zunehmen wird. Versuchen Sie also, die PWM-Frequenz zu senken und prüfen Sie dann mit Ihrem Motor, ob die Geräuscherhöhung erträglich ist.
DOWNLOAD FILES FIRMWARE
Im Folgenden finden Sie ZIP-Dateien:
– ServoPid35.hex bereit, den PIC in einfacher Version mit offener Schleife zu programmieren.
– ServoPid35.bas zu bearbeiten und neu zu kompilieren mit Fineline IDE
ServoPid_Firmware.zip