
MasterSMD-V1

La versione SMD della scheda è essenzialmente identica alla precedente versione DIL V5, con le stesse applicazioni e funzionalità. Tuttavia, ci sono alcune differenze che rendono la versione SMD più conveniente da utilizzare:
- I 12 connettori dei Pin di In Out sono tutti allineati, rendendo più facile la connessione dei cavi.
- Ogni connettore ha anche un collegamento GND e un’uscita di alimentazione, a differenza della versione precedente in cui solo sei connettori avevano queste funzionalità.
- Ogni gruppo di sei connettori può essere impostato per alimentare sensori a 3.3V o 5V, offrendo una maggiore flessibilità.
- Il connettore USB è di tipo USB-C, come richiesto per tutti i nuovi progetti.
- Grazie al connettore USB-C, lo spessore complessivo della scheda è stato ridotto.
- C’è anche un connettore a 4 pin maschi sulla destra che consente di collegare più schede Master a un HUB senza dover utilizzare cavi ingombranti.
- Infine, ci sono due comodi connettori in basso per collegare gli Slave e l’ADC24.
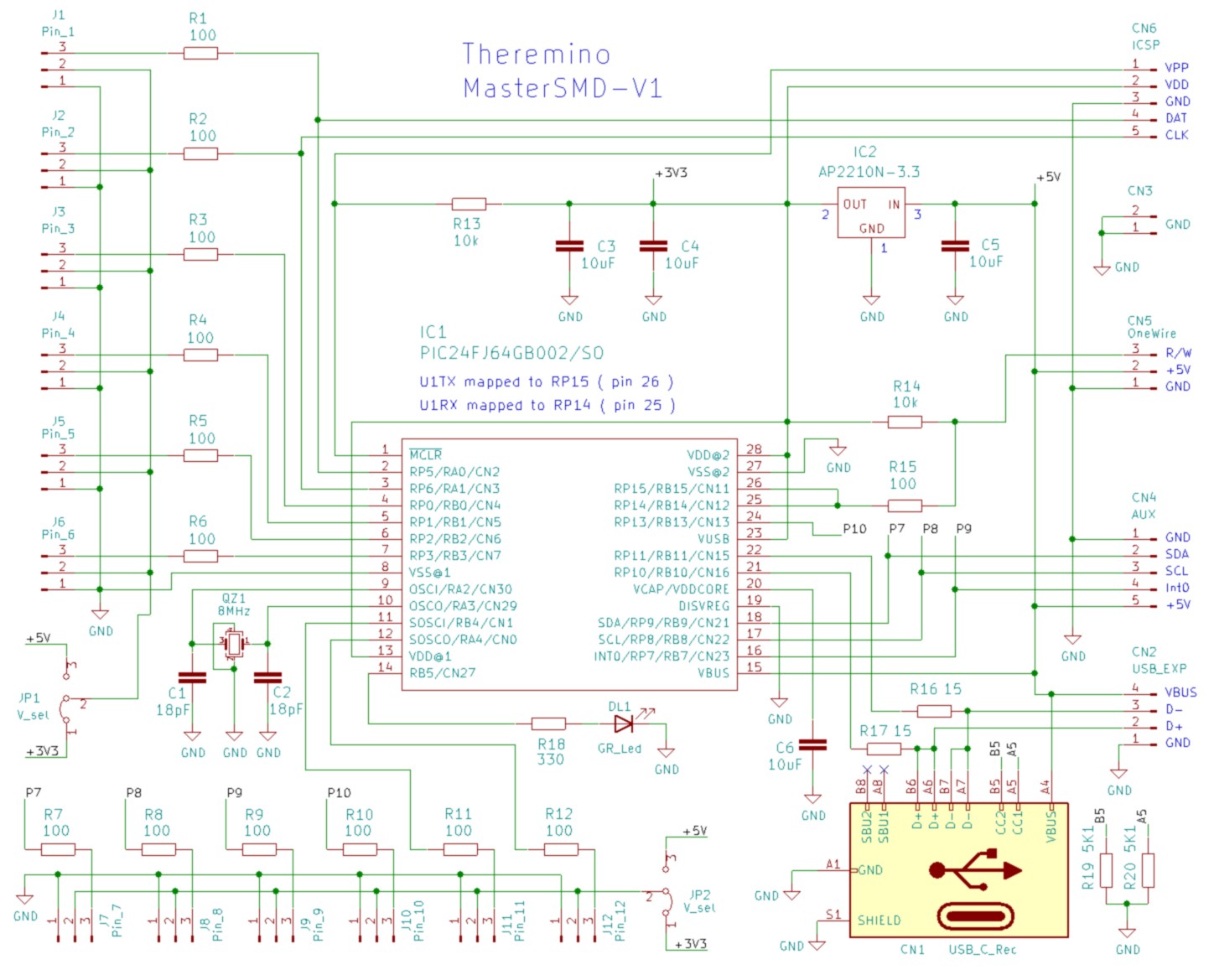
- I due ponticelli JP1 e JP2 servono per scegliere la tensione (3.3V o 5V) per i due gruppi di Pin.
- CN6 – ICSP – E’ il connettore per la programmazione ma lo si può eventualmente anche usare per connettere dispositivi a GND, 3,3V e anche ai Pin 1 e 2.
- CN5 – OneWire – Serve per collegare i moduli Slave, come ad esempio i CapSensor.
- CN4 – AUX – Serve per collegare moduli I2C (attualmente solo il Theremino Adc24).
- CN2 – USB_EXP – Serve per collegare più master a un modulo HUB USB in modo diretto, senza utilizzare cavi di connessione. Sarà necessario un HUB con i connettori femmina disposti opportunamente e attualmente non lo abbiamo ancora progettato.
- CN1 – USB_C – Può essere collegato con cavi che vanno a prese USBC, USB3, USB2 o anche USB1, e in tutti i casi le prestazioni non cambiano. L’unico vantaggio che si può ottenere con USB3 e USBC è di poter prelevare più corrente dei classici 500 mA di USB1 e USB2. La corrente massima prelevabile dovrebbe essere di 900 mA ma può variare a seconda del dispositivo (PC, Mini PC, Notebook o Tablet che fornisce la alimentazione).
MasterDIL-V5
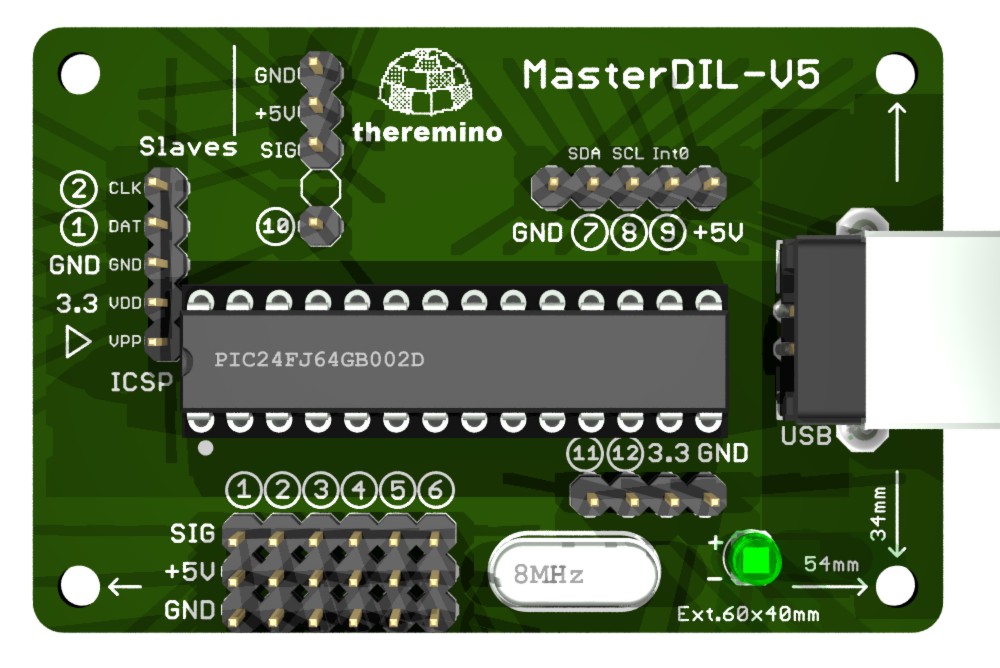
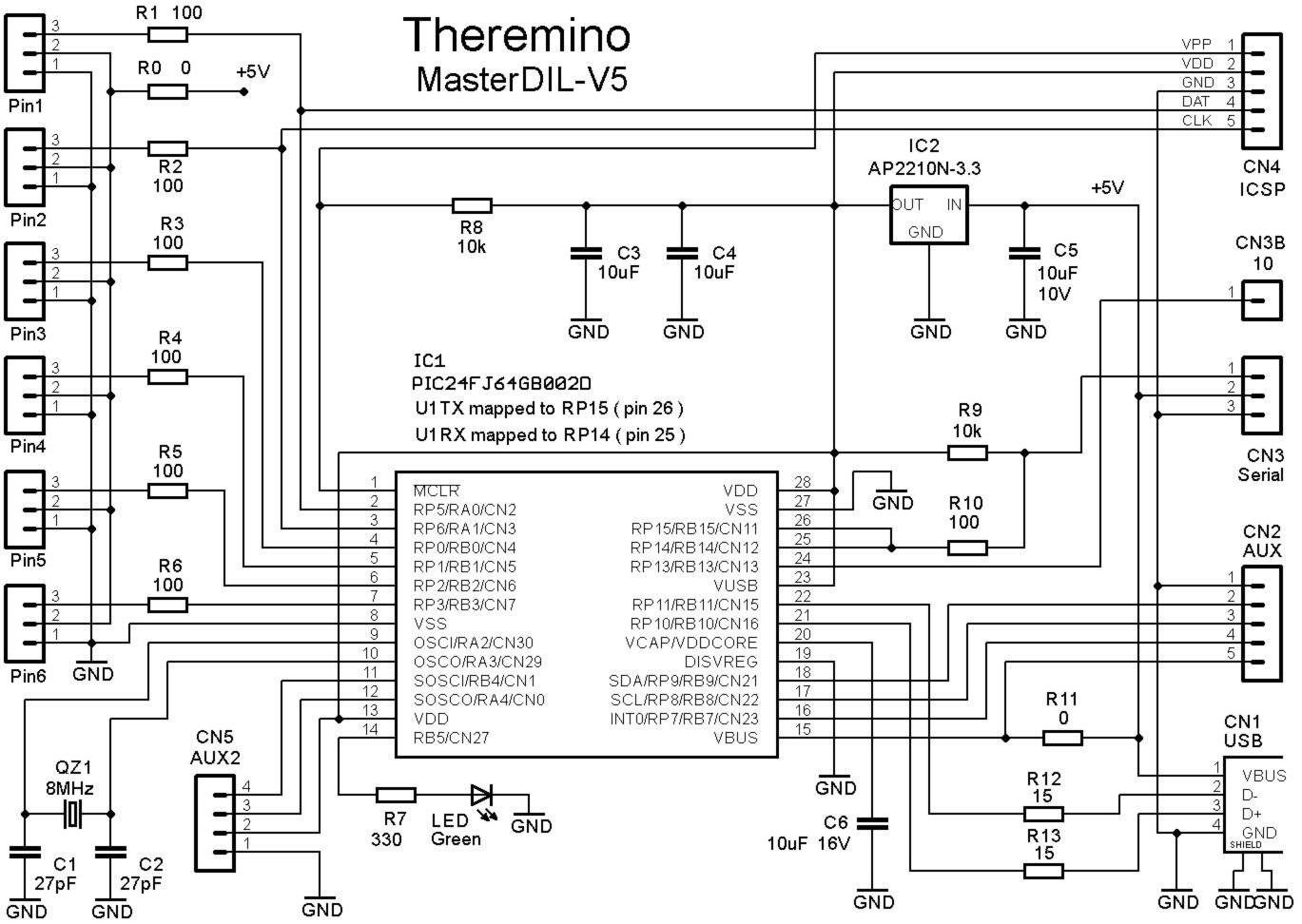
La versione V5 è identica alla precedente V4, ma ha tutti i connettori su una griglia con passo 2.54 mm.
Per usare questa nuova versione non si deve imparare niente di nuovo, si usa esattamente come le versioni precedenti, la disposizione dei Pin è quasi identica e il Firmware è intercambiabile.
Il firmware V5 che si scarica da qui è usabile anche sulle versioni precedenti di Master (V4, V3, V2) e anche sui primi prototipi e sulle versioni DIY.
Con il firmware V5, oltre a poter collegare l’Adc24, si hanno un totale di 12 Pin di In-Out, per cui si possono controllare fino a dodici Pin generici, o fino a cinque motori stepper più due Pin generici.
Sono disponibili anche i file STL per stampare un supporto in plastica per il modulo Master con le stampanti 3D.
Progetto del MasterDIL-V5
Questo è il progetto completo del PCB in formato Eagle, con schemi, piani di montaggio e immagini 3D.
MasterDIL-V5 (file zip)
Firmware 5.0, che abilita anche la comunicazione con gli Adc24
Comprende anche il file HEX per i programmatori PicKit2, PicKit3 o simili.
MasterFirmware_V5.0 (file zip)
Datasheets in formato PDF
![]() MasterDIL-V5_Datasheet_ITA
MasterDIL-V5_Datasheet_ITA
![]() MasterDIL-V5_Datasheet_ENG
MasterDIL-V5_Datasheet_ENG
Datasheets in formato PDF DOC e XLSX
MasterDIL-V5_Documentation.zip
MasterDIL-V4
 In questa nuova versione individuare le posizioni dei Pin è più facile, perché sono rappresentati da un cerchio. Anche i nuovi Pin (7, 8, 9, 10, 11 e 12) sono comodamente indicati con il loro numero. Il PCB è semplificato e il numero di componenti ridotto per aumentare la affidabilità. La nuova versione di firmware, implementa anche la lettura degli Encoders a due fasi e i Pin 11 e 12.
In questa nuova versione individuare le posizioni dei Pin è più facile, perché sono rappresentati da un cerchio. Anche i nuovi Pin (7, 8, 9, 10, 11 e 12) sono comodamente indicati con il loro numero. Il PCB è semplificato e il numero di componenti ridotto per aumentare la affidabilità. La nuova versione di firmware, implementa anche la lettura degli Encoders a due fasi e i Pin 11 e 12.

Il piccolo quarzo cilindrico, che era presente nelle versioni precedenti, era previsto per il calendario, ma non è mai stato abilitato. Per cui la sua mancanza non determina nessuna differenza. Abbiamo quindi deciso di eliminarlo e di usare i suoi collegamenti per i Pin 11 e 12, che sono molto più utili.
Chi volesse usare il firmware Versione 4 sui vecchi PCB della versione 3, dovrebbe togliere il quarzo cilindrico e saldare due terminali maschi per i Pin 11 e 12. Se non si usano questi Pin, si può anche lasciare il quarzo, il quale non genera nessun disturbo.
Per usare questa nuova versione di Master non si deve imparare niente di nuovo, si usa esattamente come la Versione 3, la disposizione dei Pin è quasi identica e il Firmware è intercambiabile.
Progetto del MasterDIL-V4
Questo è il progetto completo del PCB in formato Eagle, con schemi, piani di montaggio e immagini 3D.
MasterDIL-V4 (file zip)
Firmware 4.0, che abilita dodici Pin e i tipi Encoder
Comprende anche il file HEX per i programmatori PicKit2, PicKit3 o simili.
MasterFirmware_V4.0 (file zip)
Datasheets in formato PDF
![]() MasterDIL-V4_Datasheet_ITA
MasterDIL-V4_Datasheet_ITA
![]() MasterDIL-V4_Datasheet_ENG
MasterDIL-V4_Datasheet_ENG
![]()
![]() Documentazione editabile in formato ODT – Italiano e Inglese
Documentazione editabile in formato ODT – Italiano e Inglese
Chi conoscesse bene queste lingue potrebbe aprire i file con Open Office, correggerli e inviarceli. Per le altre lingue potete prendere il file inglese e farlo tradurre da: www.onlinedoctranslator.com/translator.html che è ottimo, velocissimo e rispetta la formattazione.
MasterV4_Docs_ITA_ENG
MasterDIL-V3
(versione originale del modulo master)


Per consigli sui collegamenti tra i sensori e i Pin, leggere questa pagina.
Questa terza versione del master raccoglie tutti i miglioramenti e le varianti che si sono dimostrate più funzionali. Dalla versione 3 in poi i connettori a vite sono stati sostituiti con i connettori per le prolunghe maschio-femmina. Questi connettori sono meno belli a vedersi ma di uso più comodo e affidabile. (I connettori a vite richiedevano un cacciavite molto piccolo, era necessario stringerli senza troppa forza per non rovinare la vite, ma se la forza era poca con il tempo si allentavano. Con i nuovi connettori, invece, le connessioni sono rapide e sicure)
Il circuito è molto semplice e i componenti pochissimi, il quarzo QZ2 può essere omesso, serve solo per progetti stand-alone dove si richiede un consumo di pochi uA, per un funzionamento di molti anni senza ricaricare la batteria (ad esempio un Geiger-logger che deve stare sempre acceso)
Il circuito stampato dispone di sei “Pin” (dieci nelle ultime versioni di firmware). I Pin del Master possono essere usati direttamente, senza necessità di collegare moduli “Slaves” alla linea seriale CN3. Il connettore CN2-AUX permette di collegare dispositivi ausiliari, quali contatori, frequenzimetri e dispositivi I2C (*). Il connettore CN4-ICSP permette una comoda programmazione “In circuit” con programmatore di tipo PicKit3 o simili.
Tutti i Pin lavorano tra zero e 3.3 Volt, sia in uscita che in ingresso. I Pin speciali 7, 8 e 9 accettano anche segnali da 5 Volt.
Programmazione del processore PIC
Per consigli sui programmatori leggere questa pagina: technical/pic-programming
Con il nuovo firmware dalla versione 3.2 in poi, il numero di Pin aumenta da 6 a 10. Sono anche disponibili i nuovi tipi STEPPER e PWM_FAST. Vedere le note per il modulo Master e per i motori passo passo.
Firmware 3.2, che abilita dieci Pin e i tipi Stepper e PwmFast
Comprende anche il file HEX per i programmatori PicKit2, PicKit3 o simili.
MasterFirmware_V3.2 (file zip da 4 MByte)
Firmware 2.0, che abilita i sei pin di InOut
Comprende anche il file HEX per i programmatori PicKit2, PicKit3 o simili.
MasterFirmware_V2.0 (file zip da 500 KByte)
ATTENZIONE: Chi avesse un Master delle prime versioni, con quarzo a 4MHz, deve modificare, nel File “common.h”, la seguente linea:
da: #define CRYSTAL_4MHZ 0 a: #define CRYSTAL_4MHZ 1
Poi si deve ricompilare con MPLAB, e ricreare il file HEX (magari chiamandolo xxx_4MHz_xxx)
Progetto del MasterDIL-V3
Questo è il progetto completo del PCB in formato Eagle, con schemi, piani di montaggio e immagini 3D.
MasterDIL-V3 (file zip da 1.5 MByte)
Progetto del master DIY
Questa è la vecchia versione di master DIY (per i nostalgici) si consiglia di non usarla ma di usare il nuovo MasterDIL-V3 che contiene molti miglioramenti. Comunque il firmware non cambia da una versione all’altra di PCB.
MasterDIL_DIY (file zip da 1.5 MByte)
Datasheets in formato PDF
![]() MasterDIL-V3_Datasheet_ITA
MasterDIL-V3_Datasheet_ITA
![]() MasterDIL-V3_Datasheet_ENG
MasterDIL-V3_Datasheet_ENG
![]() MasterDIL-V3_Datasheet_JAP
MasterDIL-V3_Datasheet_JAP
Ulteriori informazioni
– Software: www.theremino.com/downloads/foundations
– Moduli hardware: www.theremino.com/hardware/devices
– Immagini e Video: www.theremino.com/video-and-images
![]()
![]()
![]() Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Chi conosce bene queste lingue potrebbe aprire i file con Open Office, correggerli e inviarceli. Per le altre lingue potete prendere il file inglese e farlo tradurre da: www.onlinedoctranslator.com/translator.html che è ottimo, velocissimo e rispetta la formattazione.
Master_Documentation_ITA_ENG_JAP
“Servo” (modulo slave)
incremento del numero di pin di ingresso uscita
I moduli SERVO non si usano più, al loro posto si usano i Master che hanno molti vantaggi.
- 12 Pin invece di 10
- Comunicazione più sicura (non c’è la seriale che a volte si interrompe)
- Pin configurabili con molti tipi che nei Servo mancano
Lasciamo le informazioni seguenti solo come riferimento
per chi volesse costruirli e eventualmente migliorarli.
– – – – – –
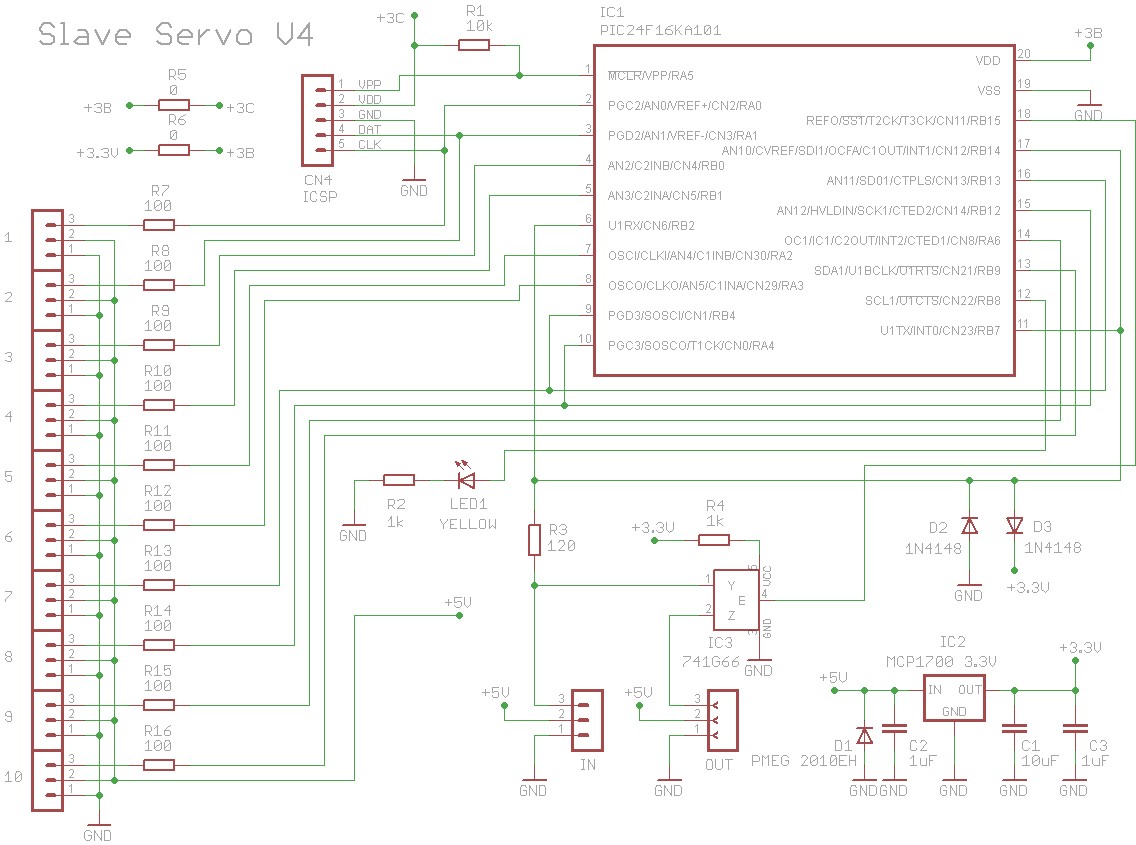
Questo modulo fornisce 10 PIN di InOut standard. Si possono collegare più slave in cascata per aumentare ulteriormente il numero di InOut.
Nei moduli Servo non sono disponibili i Pin di tipo Stepper e FastPwm.

Per consigli sui collegamenti tra i sensori e i Pin, leggere questa pagina.
Questo modulo fornisce dieci Pin di ingresso uscita generici. Oltre ai servomotori si possono collegare sensori e attuatori di ogni tipo.
Programmazione del processore PIC
Per consigli sui programmatori leggere questa pagina: technical/pic-programming
Progetto dello slave Servo – V3
Questo è il progetto completo del PCB in formato Eagle, con schemi, piani di montaggio e immagini 3D.
Slave_Servo_V3 (file zip)
Progetto dello slave Servo – V4
Questo è il progetto completo del PCB in formato Eagle, con schemi, piani di montaggio e immagini 3D.
Slave_Servo_V4 (file zip)
Firmware dello slave Servo
SlaveServo_Firmware_V1.1 (file zip)
Il firmware versione 1.1 va bene per tutti i moduli Servo. Le versioni di moduli Servo dalla V1 alla V4 sono elettricamente tutte uguali, cambia solo la serigrafia. Nella V4 abbiamo corretto la disposizione dei pin ICSP perché nelle versioni precedenti i pin DAT e CLK erano scambiati.
Datasheets in formato PDF
![]() Slave_Servo_Datasheet_ITA
Slave_Servo_Datasheet_ITA
![]() Slave_Servo_Datasheet_ENG
Slave_Servo_Datasheet_ENG
![]() Slave_Servo_Datasheet_JAP
Slave_Servo_Datasheet_JAP
Ulteriori informazioni
– Software: www.theremino.com/downloads/foundations
– Moduli hardware: www.theremino.com/hardware/devices
– Immagini e Video: www.theremino.com/video-and-images
![]()
![]()
![]() Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Chi conosce bene queste lingue potrebbe aprire i file con Open Office, correggerli e inviarceli. Per le altre lingue potete prendere il file inglese e farlo tradurre da: www.onlinedoctranslator.com/translator.html che è ottimo, velocissimo e rispetta la formattazione.
SlaveServo_Documentation_ITA_ENG_JAP
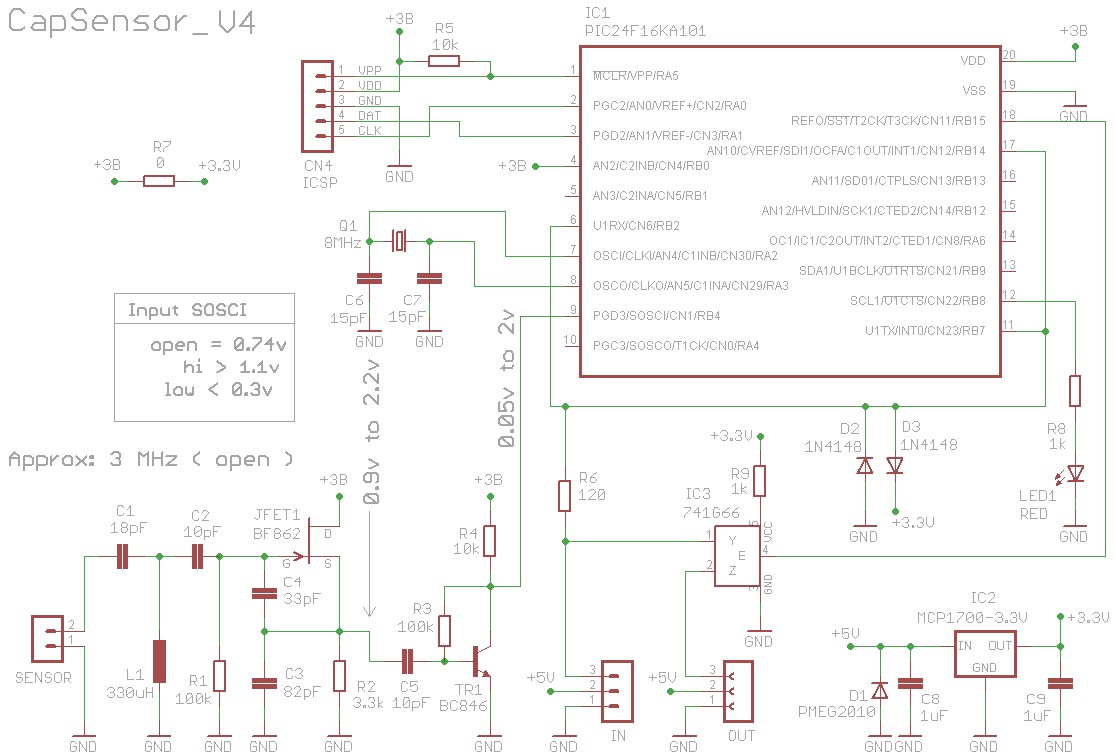
“CapSensor” (modulo slave)
rilevazione della posizione di una mano a grande distanza

Firmware e Progetto dei CapSensor
La costruzione, la taratura, il collaudo e i componenti dei CapSensor sono critici. Basta, ad esempio, che L1 non sia della marca giusta (TDK), per danneggiare notevolmente la stabilità in temperatura e il rumore di fondo. E le TDK si trovano solo da Mouser (20 euro di spedizione). Non sono effetti da trascurare, si passa da un raggio di azione di molti metri, a pochi centimetri. Vogliamo evitare delusioni agli auto-costruttori e evitare a noi, di dover aggiustare, via-mail, i moduli non funzionanti. Oltretutto, se si conta anche il tempo, per testare e tarare il firmware e tutti i problemi e le delusioni, costa molto meno comprarli che farli. Quindi consigliamo di non auto-costruire questi moduli.
Per evitare delusioni sarebbe meglio non pubblicare il firmware, ma dato che tutti i nostri progetti sono Open Source… Pubblichiamo anche la nuova versione di firmware con il nuovo algoritmo a “Latenza dinamica”.
Progetto dello Slave-CapSensor-V3
Questo è il progetto completo del PCB in formato Eagle, con schemi, piani di montaggio e immagini 3D.
Slave_CapSensor_V3 (file zip da 3.5 MByte)
Progetto dello Slave-CapSensor-V4
Questo è il progetto completo del PCB in formato Eagle, con schemi, piani di montaggio e immagini 3D.
Slave_CapSensor_V4 (file zip da 3.5 MByte)
CapSensorHQ – Firmware versione 1 (per chi volesse provare il firmware precedente)
CapSensor_Firmware_V1
CapSensorHS – Firmware versione 2.1 (con il nuovo algoritmo a latenza dinamica)
CapSensor_Firmware_V2.1
Il firmware versione 2.1 va bene per tutti i moduli CapSensor. Le versioni di moduli dalla V1 alla V4 sono elettricamente tutte uguali, cambia solo la serigrafia. Nella V4 abbiamo corretto la disposizione dei pin ICSP perché nelle versioni precedenti i pin DAT e CLK erano scambiati.
Programmazione del processore PIC
Per consigli sui programmatori leggere questa pagina: technical/pic-programming
Vantaggi dei CapSensorHS (Hi Speed) con firmware versione 2 a “Latenza dinamica”
- Latenza incredibilmente bassa (fino a 0.8 mS) quando la mano è vicina e si muove velocemente.
- Grande accuratezza per mezzo di una lunga integrazione (fino a 16 o 32 mS) quando la mano è lontana e si muove piano.
- Il compromesso tra tempo di latenza e stabilità delle note (che è il grande limite di tutti i Theremin), viene migliorato di circa 20 volte.
- Con il nuovo firmware, il valore istantaneo della latenza è visibile nella piccola finestra di parametri dell’HAL, sotto al grafico dell’oscilloscopio (usare la versione di HAL più recente).
- Nella versione 2 abbiamo anche migliorato la gestione degli eventi di Interrupt e delle LowPriorityActivities. Abbiamo così eliminato piccoli saltellamenti, che si verificavano ad alcune particolari frequenze di oscillatore, e quando il valore grezzo era esattamente a 458751 (6FFFF).
Collaudare i CapSensor
- Selezionare nell’HAL la linea del CapSensor e impostare TipoPin = Cap_Sensor
- Fare doppio click sulla linea del CapSensor per aprire l’oscilloscopio
- Controllare nel riquadro dei valori in basso, che la frequenza sia da 2.7 MHz a 2.9 Mhz
- Premere “Mostra i valori grezzi”
- Alzare lo “Zoom verticale” al massimo
- Premere “Imposta lo zero”
- Controllare che la linea sia stabile e non rumorosa. Normalmente la linea deriva lentamente verso l’alto o verso il basso ed è solo leggermente ruvida. Fare questa prova senza antenna e tenendo perfettamente fermo il CapSensor e i suoi fili.
Datasheets in formato PDF
![]() Slave_CapSensor_Datasheet_ITA
Slave_CapSensor_Datasheet_ITA
![]() Slave_CapSensor_Datasheet_ENG
Slave_CapSensor_Datasheet_ENG
![]() Slave_CapSensor_Datasheet_JAP
Slave_CapSensor_Datasheet_JAP
Ulteriori informazioni
– Software: www.theremino.com/downloads/foundations
– Moduli hardware: www.theremino.com/hardware/devices
– Immagini e Video: www.theremino.com/video-and-images
![]()
![]()
![]() Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Chi conosce bene queste lingue potrebbe aprire i file con Open Office, correggerli e inviarceli. Per le altre lingue potete prendere il file inglese e farlo tradurre da: www.onlinedoctranslator.com/translator.html che è ottimo, velocissimo e rispetta la formattazione.
SlaveCapSensor_Documentation_ITA_ENG_JAP
“Master-ISO”
isolamento di sicurezza della linea seriale



Lo stampato di questo isolatore permette di montare il TMH0505S in due posizioni a seconda che si desideri prelevare la alimentazione dal Master (e quindi dalla USB) o che si desideri alimentare il Master con la alimentazione proveniente dagli Slaves (per applicazioni Stand Alone)
ATTENZIONE: Si tratta di un progetto obsoleto. Quando venne progettato non c’erano alternative commerciali valide, ma ora esistono isolatori per la linea USB e sono abbastanza economici. Isolare la linea USB è meglio che isolare la sola seriale, si ottiene una totale separazione tra PC e moduli di IN-OUT. Per cui questo modulo non è mai stato prodotto ed è stato testato poco. Sconsigliamo di costruirlo.
“PmtAudioAdapter – Nuova versione”
alimentatore da 100 a 1800 Volt per tubi PMT e Geiger
Questa nuova versione ha caratteristiche migliorate, è più compatta, non ha bisogno della scheda audio modificata e nemmeno del limitatore di corrente. Inoltre la assenza del cavo di collegamento permette di ottenere un rumore ancora minore.

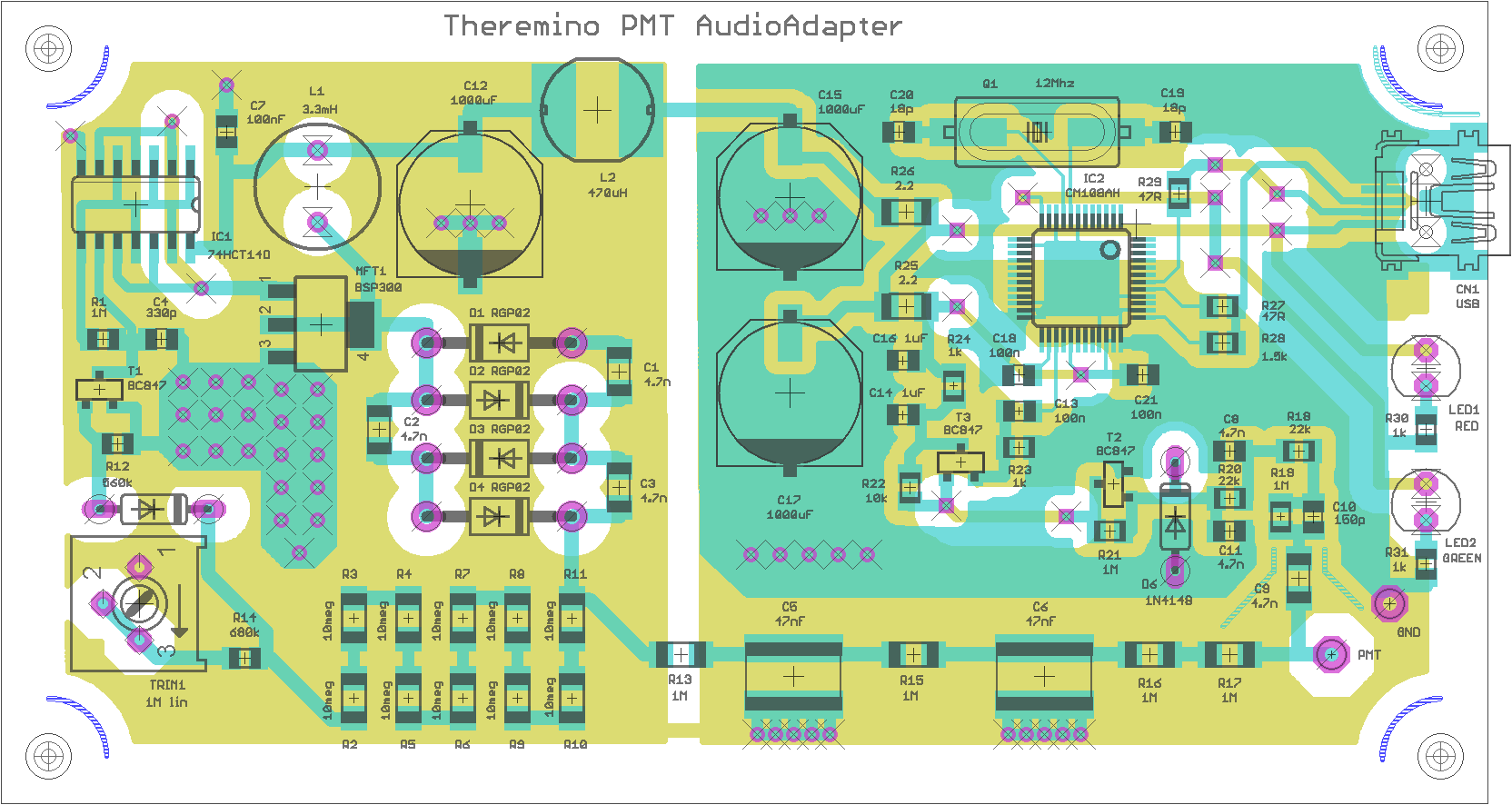
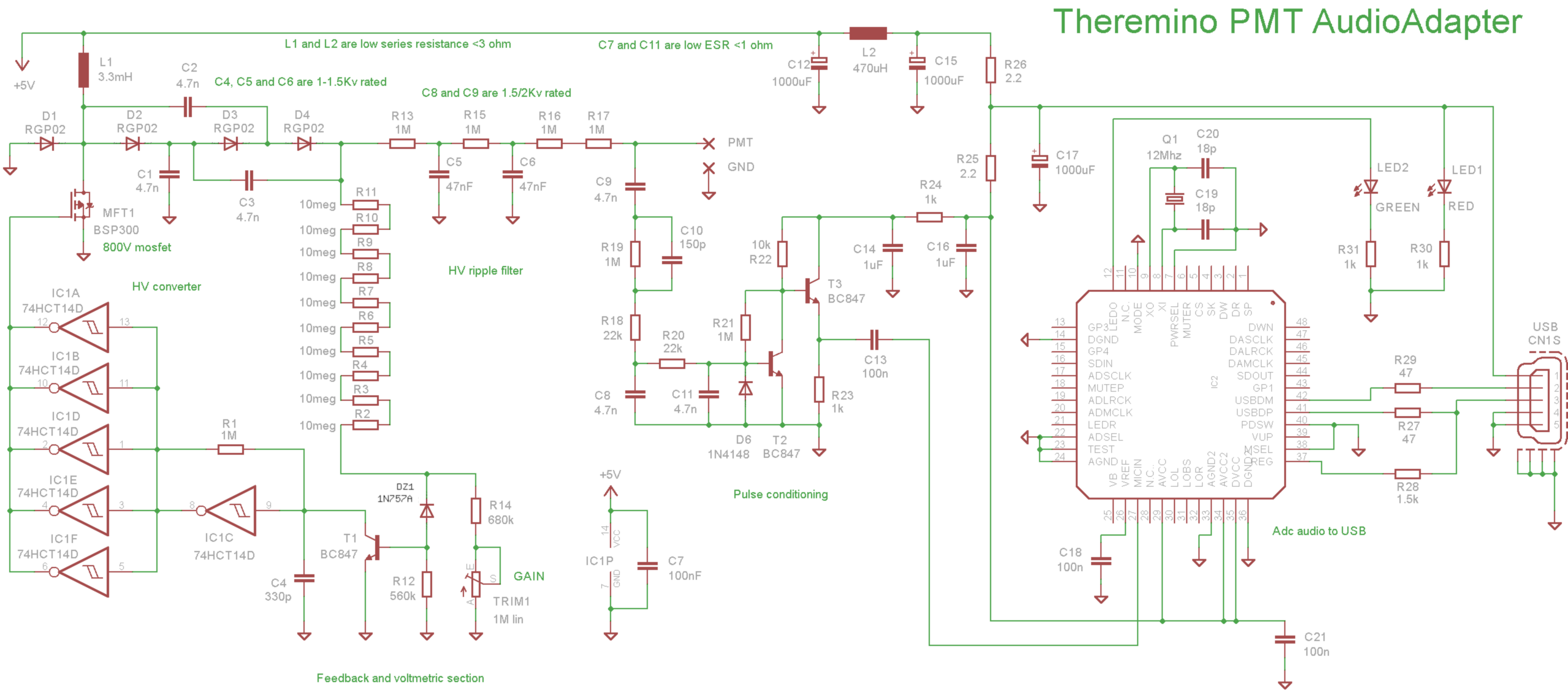
Le caratteristiche di base sono le stesse della prima versione che trovate nel capitolo seguente.
Per avere il PMT Audio Adapter in KIT o montato contattate Lello in questa pagina
Se vi servissero i file per modificare il PCB chiedete a Lello di spedirveli.
“PmtAdapter – Versione originale”
alimentatore da 100 a 1800 Volt per tubi PMT e Geiger
Questo alimentatore, ha ottime caratteristiche, consuma pochissimo (da 10 mA a 30 mA) e stabilizza la tensione di uscita, in modo da mantenere costante la scala delle energie. Il segnale di uscita è condizionato in modo “gaussiano” e “bipolare” per ottenere la massima risoluzione di misura.




Il transistor T1 è in alternativa al mosfet MFT1, se si monta uno non si monta l’altro. Con il mosfet l’efficienza è maggiore. Per consigli sui collegamenti tra i sensori e i Pin, leggere questa pagina.
Il normale range di questo alimentatore va da 500 a 1000 volt. Sostituendo R101 si ottiene un range da 700 a 1500 Volt. E’ possibile anche scendere fino a 100 Volt e salire fino a 1800 Volt (alzando R101 la tensione si abbassa e viceversa).
E’ anche possibile collegare un tubo Geiger al posto del PMT e inviare gli impulsi al ThereminoGeiger via ThereminoMCA o via ThereminoAudioInput. In questo modo si possono alimentare anche tubi Geiger da 900 Volt e oltre. Per tubi da 300, 400 o 500 Volt si può estendere la gamma di regolazione verso il basso aumentando R101 o usando un TRIM1 da 2.2 o da 4.7 Mega. La tensione regolabile permette anche di fare esperimenti e misurare il plateau di tubi Geiger sconosciuti.
Datasheets in formato PDF
![]() PmtAdapters_ITA
PmtAdapters_ITA
![]() PmtAdapters_ENG
PmtAdapters_ENG
![]() PmtAdapters_JAP
PmtAdapters_JAP
Download del progetto completo
Questo file comprende il progetto del PCB Eagle, le immagini 3D e le simulazioni LTspice: PMT_Adapter_V3.3
Ulteriori informazioni:
– Software: www.theremino.com/downloads/radioactivity
– Spettrometria Gamma: www.theremino.com/blog/gamma-spectrometry
– Hardware, autocostruzione e kits: www.theremino.com/contacts/producers
– Immagini e Video: www.theremino.com/video-and-images
![]()
![]()
![]() Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Chi conosce bene queste lingue potrebbe aprire i file con Open Office, correggerli e inviarceli. Per le altre lingue potete prendere il file inglese e farlo tradurre da: www.onlinedoctranslator.com/translator.html che è ottimo, velocissimo e rispetta la formattazione.
PmtAdapters_Documentation_ITA_ENG_JAP
“GeigerAdapter”
adattatore tra tubi Geiger e PIN standard
Questo alimentatore, ha ottime caratteristiche, consuma solo 10 uA, riesce a funzionare a partire da soli 3.5 Volt, la sua uscita è molto stabile e si adatta facilmente a tutti i comuni tubi Geiger.



Il normale range di questo alimentatore è da 300 a 500 volt. Le tensioni 400 e 300 Volt si ottengono ponticellando i punti marcati 400A con 400B oppure 300A con 300B.

Il tubo Geiger va sempre connesso alle piazzole “Geiger +” e “Geiger GND”, non collegate i fili provenienti dal tubo Geiger alle piazzole denominate 300, 400 e 500, che sono invece destinate alla selezione della tensione.
In caso di collegamenti lunghi (più di quelche metro tra GeigerAdapter e Master), si deve usare un cavo schermato e seguire queste istruzioni: sensors#connections
Le tensioni effettive sono tenute leggermente basse, in modo da far lavorare i tubi nella metà bassa del plateau (questo diminuisce leggermente la sensibilità dei tubi Geiger ma riduce molto il numero di impulsi spuri prodotti) Si può verificare questo effetto anche con una contro-prova: se si fa lavorare un Geiger in prossimità della tensione massima la sua sensibilità cresce di poco ma il numero di impulsi di background diventa molto alto, fino a che, arrivando alla tensione massima di plateau, il tubo si mette a scaricare in continuazione e produce migliaia di impulsi spuri al secondo.
Per i tubi da 300 Volt (che hanno un plateau più stretto) la riduzione è di pochi volt mentre per quelli da 400 e da 500 si lavora in pratica a circa 380 Volt e a 475 Volt (il 5% in meno rispetto alla tensione nominale) Questo accorgimento migliora la stabilità delle righe quando gli impulsi da misurare sono pochi rispetto a quelli prodotti dal tubo, in pratica quando si misura il fondo ambiente.
Per i tubi che necessitano di 10 MegaOhm, come lo LND712, si aggiunge un resistore da 4.7 Mega in serie al filo positivo che va al tubo Geiger. In questo modo il 4.7 Mega esterno, si somma al 5.6 Mega sullo stampato e si ottengono circa 10 MegaOhm.
La versione in SMD non è facilmente modificabile ma lo schema è valido anche per versioni Thru-Hole e anche con caratteristiche abbastanza diverse. Ad esempio sostituendo T1 con un MJE13003 (i transistor che si trovano nelle lampade fluorescenti da pochi watt), C1, C2 con condensatori da 1500 Volt e C3, C4 e C5 con condensatori da 800 Volt si potrebbe farlo funzionare fino a 1400 Volt (per tensioni molto alte ed a seconda della corrente richiesta qualche modifica ulteriore ai valori di alcuni componenti potrebbe essere necessaria)
In una versione non SMD i diodi D1, D2, D3 e D4 potrebbero essere sostituiti con gli RGP02-20. In ogni caso si devono usare zener con corrente di perdita molto bassa altrimenti la tensione non viene raggiunta o scende quando la temperatura ambiente cresce. Se non si dispone di zener a bassissima corrente di perdita allora si possono sostituire R7 e R8 con due resistori da 1 Mega. Con resistori da 1 Mega il consumo sale dai normali 10 uA fino a 150 uA ma la corrente di perdita dei diodi diventa tollerabile.
Datasheets in formato PDF
![]() GeigerAdapter_Datasheet_ITA
GeigerAdapter_Datasheet_ITA
![]() GeigerAdapter_Datasheet_ENG (09 sep 2013 updated with little corrections)
GeigerAdapter_Datasheet_ENG (09 sep 2013 updated with little corrections)
![]() GeigerAdapter_Datasheet_JAP
GeigerAdapter_Datasheet_JAP
Download del progetto Eagle che comprende la simulazione LtSpice, le immagini in 3D, il file GCode per chi vuol fare lo stampato con la fresa e il PCB in formato Eagle: GeigerAdapterV3.zip
Un consiglio: Non fatelo a casa! I componenti sono critici. La tecniche di costruzione devono essere adeguate. Scegliete piuttosto le versioni: DIY e Flintstones.
Ulteriori informazioni:
– Software: www.theremino.com/downloads/radioactivity
– Geiger: www.theremino.com/blog/geigers-and-ionchambers
– Hardware, autocostruzione e kits: www.theremino.com/contacts/producers
– Immagini e Video: www.theremino.com/video-and-images
![]()
![]()
![]() Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Documentazione editabile in formato ODT – Italiano, Inglese e Giapponese
Chi conosce bene queste lingue potrebbe aprire i file con Open Office, correggerli e inviarceli. Per le altre lingue potete prendere il file inglese e farlo tradurre da: www.onlinedoctranslator.com/translator.html che è ottimo, velocissimo e rispetta la formattazione.
GeigerAdapter_Documentation_ITA_ENG_JAP (09 sep 2013 – ENG version updated)
Geiger Adapter DIY
Alcuni auto-costruttori hanno chiesto un GeigerAdapter, facilmente costruibile. Abbiamo quindi progettato questa versione apposta per loro. Tutti i componenti sono facilmente reperibili ma ci sono tre o quattro componenti SMD nella parte inferiore. Chi volesse una versione più grande, costruibile anche su basetta mille-fori, può usare la versione “Flintstones” illustrata nella prossima sezione.


Il consumo di corrente è abbastanza basso (da 100uA fino a qualche mA a seconda della tensione di uscita impostata). Con componenti comuni e senza gli zener a bassissima corrente di perdita (reperibili solo negli USA con 30 euro di spedizione) non è possibile ottenere il consumo incredibilmente basso della nostra versione SMD (10 uA).
In compenso questo schema è semplicissimo! Ed è anche facilmente adattabile a ogni tensione da 100 Volt fino a 600 Volt (e oltre) cambiando il solo valore del resistore R8. (e forse anche ritoccando R9 e aumentando C5 in alcuni casi, a seconda dello zener usato)
Il transistor MJ13003 (o 13002) può essere ricavato da lampade fluorescenti compatte non più funzionanti. (cercare quelle piccole, da 10 Watt o meno, le lampade grandi non contengono i 13002 o 13003 ma altri transistor più grandi) Anche l’induttanza L1 può essere ricavata dalle lampade fluorescenti (solitamente le lampade contengono una induttanza da 1 mH fino a 5 mH. Sono tutti valori di induttanza che vanno bene, ma con 5 mH si abbassa il consumo di corrente)
Download del progetto completo che comprende la simulazione LtSpice, le immagini in 3D, il file GCode per chi vuol fare lo stampato con la fresa e il PCB in formato Eagle: GA500_DIL_V1
Geiger Adapter DIY – Versione Flintstones


Su richiesta, ecco la versione per il tardo neolitico. Il passo dei resistori è dieci millimetri, quindi si possono usare i resistori da 1/4 di watt. Non ci sono componenti nella faccia inferiore e tutti i componenti sono posizionati a passo 2.54 mm (quindi costruibile su basetta mille-fori o su lastre di pietra forate)
Le caratteristiche elettriche sono le stesse della precedente versione DIY. La tensione per il geiger può essere regolata da 100 Volt fino a 600 Volt e oltre. Nello schema elettrico sono indicati i consumi di corrente e altri particolari utili.
Download del progetto completo che comprende la simulazione LtSpice, le immagini in 3D, il file GCode per la fresa e il PCB in formato Eagle: GeigerPterodapter_Flinstones
Attenzione: Esistono copie non approvate dei nostri moduli. Questi prodotti differiscono meccanicamente ed elettricamente dai nostri progetti e hanno un Copyright, quindi non sono realmente Open. Secondo le nostre regole sono prodotti inaffidabili e mal progettati, vedere qui. Quindi non forniremo aggiornamenti e assistenza per essi. Gli unici prodotti costruiti seguendo le nostre indicazioni, sono reperibili presso: thereminoshop (Shenzen China), Amazon (Yuntab-WaveGroup), eBay (Maxtheremino) e, per le costruzioni artigianali senza fine di lucro, Alessio (makers@theremino.com).